
Fターム[3D041AD30]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 変速 (1,080)
Fターム[3D041AD30]の下位に属するFターム
変速段、変速比位置 (881)
シフトチェンジ (94)
変速パターン、変速モード (48)
Fターム[3D041AD30]に分類される特許
21 - 40 / 57
駆動力制御装置
【課題】加速要求中の運転者の違和感を抑制することができる駆動力制御装置を提供する。
【解決手段】動力発生手段の回転速度と当該動力発生手段が発生させるトルクとに応じた当該動力発生手段の最適燃費線を基準として設定される燃費良領域内の動作点で動力発生手段の運転を制御可能な動力制御手段16と、動力発生手段の出力が伝達される変速機の変速比を制御可能な変速比制御手段15とを備え、動力発生手段の動作点が燃費良領域内の最適燃費線からずれた位置にある運転状態で、かつ、当該運転状態が定常的である際に、変速比制御手段15は、変速速度を低下させて変速機の変速比を制御し、動力制御手段16は、動作点が最適燃費線上になるように動力発生手段の運転を制御する。
(もっと読む)
車両走行制御装置

【課題】内燃機関と、内燃機関の出力を駆動軸に伝達する無段変速機とが搭載された車両において、内燃機関の回転数の目標値である目標回転数を実現するように内燃機関および無段変速機が制御される場合に、加速時に運転者に対して車速の変化に応じた加速感を与えられる車両走行制御装置を提供すること。
【解決手段】内燃機関と、内燃機関の出力を駆動軸に伝達する無段変速機とが搭載された車両に設けられ、内燃機関の回転数の目標値である目標回転数を実現するように内燃機関および無段変速機を制御する車両走行制御装置であって、車速に基づいて、目標回転数を設定する設定手段と、車両が加速状態にあるか否かを判定する判定手段とを備え、設定手段は、判定手段により車両が加速状態にあると判定された場合(S40−Y)には、車速の増加量に対して内燃機関の音圧の増加量が比例的となるように、目標回転数を設定する(S70,S80)。
(もっと読む)
車両の制御装置
【課題】入力クラッチの締結ショックを軽減するためのエンジン制御の終期を、エンジン回転速度の変化があっても正しく判定できるようにする。
【解決手段】NレンジからDレンジへのシフトに基づき入力クラッチの締結が開始されると、エンジンのトルクダウン制御を開始して、締結ショックの緩和を図る。前記トルクダウン制御の終期は、最新のエンジン回転速度NEとタービン回転速度NTとの差D2と、入力クラッチの締結開始時におけるエンジン回転速度NEとタービン回転速度NTとの差D1との偏差(D2−D1)が規定値N2よりも大きいか否かに基づいて判断する。そして、D2−D1>N2になると、トルクダウン制御を終了させる。
(もっと読む)
作業車の走行変速構造
【課題】 作業車において走行用の変速装置及びガバナ装置を操作する操作レバー及び操作ペダルを備えた場合、ガバナ装置及び走行用の変速装置を一緒に高速側及び低速側に操作できる利点を残しながら、操作ペダルによって適切な操作が行えるようにする。
【解決手段】 操作ペダル12の操作位置に対応するエンジン3の回転数が、操作レバー11の操作位置に対応するエンジン3の回転数よりも低速側であると、操作レバー11の操作位置に対応する位置にガバナ装置15が操作された状態で、操作ペダル12の操作位置に対応する変速位置に走行用の変速装置6が操作される。操作ペダル12の操作位置に対応するエンジン3の回転数が、操作レバー12の操作位置に対応するエンジン3の回転数よりも高速側であると、操作ペダル12の操作位置に対応する位置にガバナ装置15を操作し、且つ、操作ペダル12の操作位置に対応する変速位置に走行用の変速装置6が操作される。
(もっと読む)
エンジントルク制御装置
【課題】ダウンシフト変速時にエンジンの出力トルクが反転してゼロクロスショックが起こらないようにする
【解決手段】自動変速機2側への動力伝達がトルクコンバータ3を介して行われるエンジン1のトルク制御装置であって、目標エンジントルクを決定する目標エンジントルク決定部51と、エンジンを制御して目標エンジントルクを出力させるエンジン制御部53と、目標エンジントルクを補正する目標エンジントルク補正部52とを備え、目標エンジントルク補正部52は、ダウンシフト変速開始時のエンジン1の出力トルクが正トルクである場合には、ダウンシフト変速時に出力トルクを正トルクで維持するために目標エンジントルクを増加させる補正量を決定して目標エンジントルクを補正し、エンジン制御部53は、補正後の目標エンジントルクに基づいてエンジンを制御して、出力トルクが、正トルクから逆トルクに反転しないようにした。
(もっと読む)
車両特に商用車両の衝突を回避するか又は衝突による衝突の重大さを減少する装置及び方法
本発明は、車両特に商用車両の衝突を回避するか又は衝突による衝突の重大さを減少する装置であって、交通状況に関係する基準を入力しかつ交通状況に関係する閾値を求める入力装置、車両の周辺にある物体を検出する検出装置、自己の車両の運動状態を測定する測定装置、入力装置、検出装置及び測定装置から得られる情報を処理し、かつ車両の運動状態に関係する構成要素を制御する制御信号を発生する制御装置、及び発生される制御信号を出力する出力装置を含んでいる。本発明は更に対応する方法及びコンピュータプログラムに関する。 (もっと読む)
内燃機関のエンジン制動装置の制御方法及び車両用内燃機関
本発明は、内燃機関(10)のトランスミッション(26)のシフトアップ動作間における、車両内燃機関(10)のエンジン制動装置(16)の制御方法に関する。本発明は、さらに、前記方法の実行に適した、車両用、特に商用車内燃機関(10)に関し、この内燃機関は、第1シリンダバンク(12a)及び第2シリンダバンク(12b)、シリンダバンク個々のエンジン制動装置(16)、シリンダバンク個々の燃料供給装置(18)、シフト可能なトランスミッション(26)を備え、このトランスミッションは、変速歯車と、クラッチ(22)によって内燃機関(10)のクランクシャフト(20)に連結可能なインプットシャフト(24)と、を有している。 (もっと読む)
車両の制御装置
【課題】パワーオンアップシフト時にスロットルによるトルクダウン制御を実施する車両において、イナーシャ相開始時に合わせた最適なタイミングでトルクダウンを開始する。
【解決手段】変速指示からイナーシャ相開始までの時間及びトルクダウン制御時のスロットル閉じ要求に対する実スロットル開度の応答遅れを考慮してトルクダウン開始時間の初期設定値A0を算出し、その算出したトルクダウン開始時間の初期設定値A0を、油圧学習制御時の補正油圧Pに基づいて算出した補正値A1を用いて補正する。このような補正を行うことで、変速時間を一定にする油圧学習制御によって指示油圧が変動しても、その油圧変動による影響を軽減することが可能になるので、イナーシャ相開始時に合わせた最適なタイミングでトルクダウンを開始することができる。
(もっと読む)
車両の制御装置
【課題】協調モードと非協調モードとを切り替えたときに機関出力が急激に変化することに起因して生じるショックを抑制することのできる車両の制御装置を提供する。
【解決手段】電子制御装置40は、車速とアクセルペダル60の操作量とに基づいて要求出力を算出し、要求出力に基づいて目標スロットル開度と目標変速比とを設定して内燃機関10及び無段変速機30を制御する協調モードと、シフトレバー81又はステアリングシフトスイッチ91を通じて運転者の選択した変速段に対応する変速比を保持するとともに、アクセルペダル60の操作量に対応した目標スロットル開度を設定して内燃機関10及び無段変速機30を各別に制御する非協調モードとの間で車両制御モードを切り替える。電子制御装置40は、車両制御モードが切り替えられたとき、目標スロットル開度を切り替え前の設定値から切り替え後の設定値に徐々に変更する徐変処理を実行する。
(もっと読む)
駐車支援装置
【課題】精度良く、且つ短時間で駐車の目標位置及び駐車のための経路を設定して、駐車の際の乗員の運転負荷を軽減できる駐車支援装置を提供する。
【解決手段】駐車支援装置は、後退開始位置P1まで前進し、後退開始位置P1から後進して、所定の駐車位置Eへ車両30を駐車させる運転操作を、以下のように支援する。駐車目標設定部は、車両30の周辺の情景が撮影された画像データに基づいて検出された駐車基準W1、W2に基づいて、所定の駐車位置Eに対応する駐車目標位置P4を設定する。駐車経路演算部は、前進経路KFを前進中に、車両30の現在位置から駐車目標位置P4への駐車経路KBを逐次演算する。駐車経路判定部は、駐車経路演算部の演算結果に基づいて、駐車経路KBが成立したか否かを判定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 可変動弁機構を備え、かつモータ走行からエンジン走行への移行がスムーズに行われるハイブリッド車両の制御装置を提供する。
【解決手段】 エンジンとモータジェネレータとを接続する第1クラッチと、モータジェネレータと変速機とを接続する第2クラッチと、制御手段とを備え、第1クラッチと第2クラッチを制御することにより、エンジンとモータジェネレータの一方または両方によって走行するハイブリッド車両の制御装置において、エンジンは、バルブタイミングを変更可能な可変動弁機構を備え、可変動弁機構は、油圧によってバルブタイミングを変更可能な構成であって、制御手段は、エンジンの駆動力を用いた走行中にエンジンを停止する際、エンジンへの燃料供給を停止した後に第1クラッチを解放することとした。
(もっと読む)
駆動力制御装置
【課題】運転指向に基づいて車両の駆動力を制御する駆動力制御装置において、車両の走行に要する注意度と乖離した駆動力制御が行われることを抑制することが可能な駆動力制御装置を提供する。
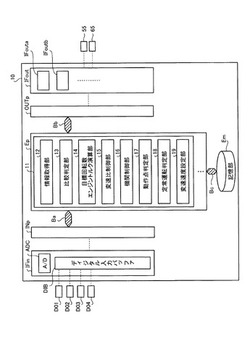
【解決手段】人工知能システムを用いて運転指向を推定し、前記推定された運転指向に基づいて車両の駆動力を補正する駆動力制御装置であって、前記車両の走行に要する注意度を推定する手段(S002)と、前記車両の走行に要する注意度に基づいて、前記駆動力の補正の応答性を変更する手段(S007〜S010)とを備えたことを特徴としている。
(もっと読む)
車両の制振制御装置
【課題】 車両の制動制御装置にて得られる車輪のスリップ状態を示す車輪スリップ状態量を利用する駆動出力制御による車両のピッチ・バウンス振動制振制御装置に於いて、制動制御装置が作動可能でないときに、不適切な制振制御が実行されることを回避すること。
【解決手段】 本発明の車両の制振制御装置は、制動制御装置から車輪スリップ状態量を取得して、車輪スリップ状態量が表すスリップの程度に基づいて駆動トルクの制御量を補正するが、制動制御装置が作動可能な状態でないときには、制動制御装置が作動可能な状態のときに比して駆動トルクの制御量を低減することを特徴とする。
(もっと読む)
車両の制御装置
【課題】エンジンのスロットル開度及び自動変速機の作動油圧を制御する車両の制御装置において、自動変速機の変速中にアクセルオフとなったときに発生する変速ショックを抑制する。
【解決手段】自動変速機の変速中にアクセルオフとなったときに、スロットル開度の減少を抑制する制御を行う際に、そのスロットル開度の減少抑制によって発生するトルク残りを考慮し、走行中アクセルオフ時に、すぐに自動変速機の係合要素(例えばブレーキ要素B3)の係合油圧を抜くのではなく、係合要素の係合油圧を緩やかに減少させることで、変速中アクセルオフ時のスロットル開度制御にて発生するトルク残りに見合ったトルク容量を確保して、自動変速機の係合要素の滑り(例えばブレーキ要素B3の滑り)を抑制する。
(もっと読む)
車両の制御装置
【課題】自動変速機の変速に際して、トルク相中での自動変速機の出力トルクの落込みを適切に抑制することができる車両の制御装置を提供する。
【解決手段】自動変速機22の変速過程において期間検出手段138により検出された実イナーシャ相開始期間tijに基づいて、変速制御手段132によるクイックフィル指令値の出力が終了した時点を起点として予め設定されたトルク相補償制御手段134がトルク相補償を実行するための開始タイミングが開始タイミング調整手段140により調整されるので、たとえクイックフィル指令値の出力が終了した時点から所定時間内に所定油圧となるようにクイックフィル指令値の出力期間が調整されたとしても、自動変速機22の変速に際してトルク相中での出力軸トルクToutの一時的な落ち込みを適切に抑制することができる。
(もっと読む)
障害物回避制御装置
【課題】 障害物の回避性能を高めることができる障害物回避装置を提供すること。
【解決手段】 自車両3の前方の第1障害物4、および自車両に対して第1障害物4よりも前方の第2障害物5を検出し、自車両3が第1障害物4に最も接近したときの第1障害物近接距離Lが大きいほど、第2障害物5を回避する際の旋回方向に対して、自車両3が内側を向くように、近接時目標車体横すべり角を設定した。
(もっと読む)
車両の制御装置
【課題】変速時のショックを小さくする。
【解決手段】ECUは、アップシフト時に解放状態から係合状態にする摩擦係合要素の係合圧を漸増するとともに、トルク相中にエンジンのトルクアップを行なうトルクアップ制御を実行するステップ(S100)と、摩擦係合要素のトルク相中における係合圧が、イナーシャ相が開始することのない待機圧になるように制御するステップ(S204)と、摩擦係合要素の係合圧が待機圧になるような指令がなされてからの経過時間が待機時間以上になると(S208にてYES)、エンジンのトルクを漸減する第1トルクダウン制御を実行するステップ(S210)とを含む、プログラムを実行する。
(もっと読む)
車両の駆動制御装置
【課題】変速比無限大無段変速機(IVT)を含む車両の駆動制御装置において、安価で応答性に優れること。
【解決手段】制御部34は、目標トランスミッション入力トルクTTRN,T に基づいてCVT6のトルクを制御する機能を有するIVT制御部43と、目標エンジン回転速度ωe,T に基づいてエンジン2のトルクを制御するエンジン制御部44とを含む。エンジンのトルク制御と、エンジンのトルク負荷となる目標トランスミッション入力トルクの制御とを組み合わせる。IVT制御部43およびエンジン制御部44の各制御において、入力と出力の関係を線形化する。
(もっと読む)
車両の制御装置
【課題】触媒排気臭を効率的且つ効果的に低減する。
【解決手段】車両10において、ECU100は、シフトアップ制御処理を実行する。シフトアップ制御処理では、ECT400のシフトアップ特性を規定する変速点sftpntが適宜補正される。より具体的には、床下触媒たる三元触媒222における温度及び空燃比に基づいて定義される触媒排気臭条件が満たされ且つベース変速点sftpntbがA/C500の負荷に応じて設定される下限ガード値sftpntgd未満である場合に、変速点sftpntが、係る下限ガード値sftpntgd以上となるように補正される。この結果、シフトアップ時の機関回転数Neの一時的な低下によって機関回転数NeがF/C可能回転数Nefcを下回る事態が防止され、触媒排気臭が発生し易い状況において確実にF/C制御を実行せしめることが可能となる。
(もっと読む)
無段変速機の制御装置
【課題】運転者が手動で変速特性を設定する煩わしさを防止した上で、運転状態に応じてきめ細かに且つ主観を排除して客観的に変速特性を設定できる無段変速機の制御装置を提供する。
【解決手段】運転者の運転操作、車両の旋回状態、登坂路の勾配に応じて余裕代Kresを学習し、運転者のアクセル操作量及び車速から求めたエンジンの目標パワーを達成可能な等パワー曲線を特定し、等パワー曲線上において燃費重視の運転点と加速応答性重視の運転点との間で余裕代Kresに基づいて最適な目標運転点を決定し、決定した目標運転点に基づいて変速制御を実行する。
(もっと読む)
21 - 40 / 57
[ Back to top ]