
Fターム[3D041AF07]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | 学習 (47)
Fターム[3D041AF07]に分類される特許
1 - 20 / 47
車両の制御装置
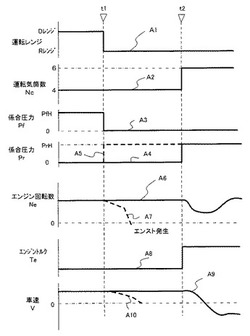
【課題】減筒運転した状態で前後進を切り替えた場合に、エンジンストールを確実に抑制することが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、車両に搭載され、エンジンと、制御手段とを備える。エンジンは、複数の気筒を備える。制御手段は、気筒の少なくとも一部を休止させた減筒運転状態で、車両の前進と後進との切り替えに基づいて、エンジンと車両の駆動軸との動力伝達の係合圧力を低下させ、少なくとも一部の休止気筒の復帰を実行する。
(もっと読む)
惰行制御装置

【課題】惰行制御中のアクセル開度の変化幅が大きい運転者に対してもアクセル開度の変化幅が小さい運転者と同等に惰行制御が実施できる惰行制御装置を提供する。
【解決手段】アクセル開度の変化幅を学習し、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が大きいときには惰行制御可能領域CAを拡大させ、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が小さいときには惰行制御可能領域CAを縮小させる惰行制御可能領域調節部4を備える。
(もっと読む)
惰行制御装置
【課題】ドライバーのアクセル操作に応じた惰行制御を行うことができ、ドライバーの不快感を低減可能な惰行制御装置を提供する。
【解決手段】所定の学習開始条件を満たし、かつ、アクセル開度速度が、惰行制御開始条件、あるいは惰行制御終了条件で設定されているしきい値範囲外となったとき、当該アクセル開度速度の大きさに応じて、前記しきい値範囲を拡大するアクセル開度速度学習手段6を備えた。
(もっと読む)
車両駆動システムの制御装置
【課題】内燃機関の出力を一定にしながら回転数を変更することが可能な車両駆動システムにおいて、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率が最大となる回転数まで内燃機関の回転数を速やかに変化させる。
【解決手段】回転数の許容最大変化量を出力に関連付けて記憶装置に記憶しておく。要求出力に応じた許容最大変化量を記憶装置から読み出し、予め設定された動作線上の回転数を初期値として許容最大変化量で回転数を変化させていく。そして、回転数が変更される度に、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率を計算し、システム効率が最大となる回転数を特定する。そして、システム効率が最大となる回転数を最適回転数として確定する。
(もっと読む)
車両走行制御システム
【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
(もっと読む)
車両の制御装置
【課題】時系列で設定した目標加速度に対する追従制御を行う際に、ロックアップクラッチ13の作動時とロックアップクラッチ13の作動不可時との間の挙動差を抑制乃至無くす。
【解決手段】車両の制御装置CRは、アクセル踏み込み操作時に目標加速度を時系列で設定する目標加速度設定部23と、実加速度が目標加速度に追従するようにエンジン出力を制御するエンジン出力制御部21と、変速制御部22と、ロックアップクラッチ13を作動不可状態を検出する作動不可検出部27とを備える。ロックアップクラッチ13の作動が不可能なときのアクセル踏み込み操作時には、目標加速度設定部23は、予め設定されている、ロックアップクラッチの作動状態での時系列の規範加速度を目標加速度にする。
(もっと読む)
動力伝達制御装置
【課題】エンジン始動時間のばらつきを抑えること。
【解決手段】エンジン10及びモータ/ジェネレータ20の内の少なくとも一方の動力を駆動輪WL,WR側へと伝達可能な動力伝達経路上に、エンジン10とモータ/ジェネレータ20との間の動力伝達を断接可能な係合部を有するクラッチ30を備え、且つ、モータ/ジェネレータ20の回転軸22の回転中にその動力でエンジン10を始動させる際、クラッチ30を当該始動時の目標係合制御量に応じて係合すると共に、その係合に伴う動力伝達経路上でのトルク変動が抑制されるようモータ/ジェネレータ20の動力を制御する車両の動力伝達制御装置において、前記始動時のクラッチ30の係合に伴うエンジン10の目標クランキング期間経過時の回転数に応じて前記始動時の目標係合制御量又は当該目標係合制御量の補正値を求めること。
(もっと読む)
電動車両の制御装置
【課題】摩擦締結要素のスリップ締結を抑制しつつ摩擦締結要素の耐久性低下を抑えると共に、ライン圧の補正精度を高めて過剰なライン圧設定を防止する。
【解決手段】走行駆動源の電動機と、電動機と駆動輪との間の動力伝達経路上に設けられた摩擦締結要素とを有し運転状態に応じて、ライン圧を必要最小限の値に設定する電動車両制御装置において、最小ライン圧設定手段は、摩擦締結要素のスリップ締結状態を検出するスリップ検出手段(ステップS1)と、摩擦締結要素のスリップ締結状態が検出されたときに、電動機の回転数制御を実行して前記スリップ締結状態を抑制するスリップ抑制手段(ステップS2)と、スリップ抑制手段(ステップS2)による電動機の回転数制御に伴って生じる摩擦締結要素への入力トルク変化量(クラッチ入力トルク補正量)ΔTinに基づき、ライン圧を学習補正するライン圧学習補正手段(ステップS5〜ステップS7)と、を備えた。
(もっと読む)
車両用制御装置
【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
車両の制御装置
【課題】 発進クラッチの伝達トルクの指令値と実際値との偏差を小さくし、運転者の所望の加速性能を得ることができるハイブリッド車両のクラッチ制御装置を提供すること。
【解決手段】 駆動トルク目標値に応じた発進クラッチのトルク容量基本目標値を演算し、モータを回転数制御しているときには、モータトルク相当値がトルク基本容量目標値より小さいときにはトルク容量基本目標値より大きな値をトルク容量目標値とし、モータトルク相当値がトルク容量基本目標値より大きいときにはトルク容量基本目標値よりも小さな値をトルク容量目標値とするようにした。
(もっと読む)
車両の制御装置
【課題】自動変速機の係合要素の係合油圧の学習がダウンシフト時に良好に行なわれる車両の制御装置を提供する。
【解決手段】車両の制御装置は、複数の変速段を減速側にシフトさせるダウンシフト指示を入力するための入力部であるシフトレバー8004と、入力部からのダウンシフト指示に応じて自動変速機の変速を制御するECU8000とを備える。ECU8000は、ダウンシフト指示に応じて原動機の出力を増大させ、複数の係合要素のうちの第1の係合要素の係合油圧を制御パラメータに基づいて変速を進行させ、原動機の出力を減少させ、変速の進行度合いに基づいて制御パラメータを学習する。
(もっと読む)
車両制御装置
【課題】ドライバの個人毎の好みに適合したタイミングで減速制御あるいは加速制御を実行することができる車両制御装置を提供する。
【解決手段】
自車の走行中に補正接近離間状態評価指標KdB_cを算出し、その補正接近離間状態評価指標KdB_cをその算出時の車間距離Dとともに運転者別に記憶装置60に記憶する。そして、記憶装置60に運転者別に記憶されている補正接近離間状態評価指標KdB_cの距離毎の最大値を求め(S10)、その最大値に基づいて、先行車との距離Dと距離毎の補正接近離間状態評価指標KdB_cの最大値との関係式を決定する(S20)。さらに、その関係式を補正することで、加減速制御の実行開始タイミングか否かを判別するための閾値を算出する速度制御開始判別式を決定する。
(もっと読む)
自動変速機の変速制御装置
【課題】具備した変速機構に特有の固定ギヤを利用して計測したトルク値に基づき、トルクリダクション等のトルク変更が目標通りに適正に行われたか否かを判定し得るようにした自動変速機の変速制御装置を提供する。
【解決手段】歪みゲージ24及びトルク値算出手段16が、反力に基づきサンギヤに作用するトルク値を検出し、入力相当値算出手段42が、検出されたトルク値に基づく入力トルク相当値を算出し、トルクリダクション指令手段13が、エンジン2に対してトルク変更を行う指令を出力し、トルク変更判定手段43が、算出された入力トルク相当値に基づき、エンジンが指令に沿って適正にトルク変更されているか否かを判定する。このため、自動変速機構5に特有のサンギヤを利用して計測したトルク値に基づき、エンジンに対するトルク変更が目標通りに適正に行われたか否かを的確に判定することができる。
(もっと読む)
車両用運転支援装置
【課題】障害物との衝突を効率よく回避することができ、信頼性の高い車両用運転支援装置を提供する。
【解決手段】障害物検出用カメラ2で障害物を検出してその障害物Bまでの距離と衝突回避に必要な横移動量とを算出する。これらと、タイヤ状態センサ3や路面μセンサ4、ブレーキ踏み量センサ10、舵角センサ11、ヨーレートセンサ12を用いて算出される最大減速度及び最大横加速度とから操舵回避限界及び制動回避限界を求める。この操舵回避限界及び制動回避限界に基づいて制動アシスト及び操舵アシストの開始タイミングを算出し、自動ブレーキアクチュエータ7と操舵アシストアクチュエータ6を効率よく組み合わせて制御する。
(もっと読む)
走行制御装置
【課題】より安全なウェット走行を可能とする走行制御装置を提供する。
【解決手段】自車水抵抗減速度算出部131は、ドライ走行データ取得部111が取得したドライ走行データとウェット走行データ取得部112が取得したウェット走行データとの差分から、路面上の水の抵抗により自車両が減速する度合である自車水抵抗減速度を算出し、車線保持走行計画生成部151は、路面が湿潤状態のときに、自車水抵抗減速度算出部131が算出した自車水抵抗減速度に基づいて自車両の走行計画を生成する。このため、路面上の水の状態に基づいて自車両をより安全にウェット走行をさせることが可能となる。
(もっと読む)
安全運転支援方法、車載端末装置、及び運転支援プログラム
【課題】
ドライバの運転操作性を損なうことなくドライバが危険な運転を行おうとした場合には安全運転支援を行う。
【解決手段】
予防安全装置120、130が作動した時、或いは予防安全装置120、130を作動させる車輪速センサ121、ヨーレートセンサ122、ブレーキ圧センサ123のセンサ値が予め設定した閾値を越えた場合に、坂道、非舗装道路、カーブ、駐車場、交差点などの走行場所と、絶対時間、降雪情報、降雨情報、外気温などの走行環境と、車両速度などの車両状態とを車両端末110内の記憶部に記憶しておき、車両が記憶された走行場所を記憶された走行環境下と車両状態で走行しようとした場合に、車載端末110はドライバへの警告通知または車両減速制御によって安全運転支援を行う。
(もっと読む)
車両用の支援装置
本発明は、クラッチによって駆動輪に接続されたパワーユニット、バス、および倍力装置付き駐停車ブレーキを含む、車両用の支援装置であって、バスに信号を送るセンサと、前記信号からの学習により、クラッチペダルの位置と対応するクラッチから伝達し得る最大トルク範囲を関連付ける、クラッチ曲線を推定する手段とを含み、さらに、前記信号に伴うセンサのノイズの影響を軽減するために、送出された信号を同位相にする手段を含むことを特徴とする装置に関する。  (もっと読む)
(もっと読む)
車両の制御装置
【課題】パワーオンアップシフト時にスロットルによるトルクダウン制御を実施する車両において、イナーシャ相開始時に合わせた最適なタイミングでトルクダウンを開始する。
【解決手段】変速指示からイナーシャ相開始までの時間及びトルクダウン制御時のスロットル閉じ要求に対する実スロットル開度の応答遅れを考慮してトルクダウン開始時間の初期設定値A0を算出し、その算出したトルクダウン開始時間の初期設定値A0を、油圧学習制御時の補正油圧Pに基づいて算出した補正値A1を用いて補正する。このような補正を行うことで、変速時間を一定にする油圧学習制御によって指示油圧が変動しても、その油圧変動による影響を軽減することが可能になるので、イナーシャ相開始時に合わせた最適なタイミングでトルクダウンを開始することができる。
(もっと読む)
車両用自動変速機の制御装置
【課題】変速動作に際してのアキュムレータの背圧制御及びトルクアップ制御それぞれの学習における干渉を抑制してそれらの制御を好適に実行できる車両用自動変速機の制御装置を提供する。
【解決手段】第2クラッチC2、第3クラッチC3、第3ブレーキB3にそれぞれ供給される油圧を制御するためのアキュムレータ104、106、108を備え、変速動作に際してそれらアキュムレータ104、106、108の背圧を制御する背圧制御を行うと共に、エンジン12から出力されるトルクを上昇させるトルクアップ制御を行う車両用自動変速機の制御装置において、背圧制御の学習が完了しているか否かを判定し、その背圧制御の学習が完了していないと判定される場合には、トルクアップ制御を非実行として背圧制御の学習を実行するものであることから、背圧制御及びトルクアップ制御それぞれの学習の干渉を回避することができる。
(もっと読む)
車両の走行安全装置
【課題】運転者の安全装置に対する依存度を推定し安全装置の作動に反映させる。
【解決手段】運転者の加速意志を検出する車両加速状態検出部13bおよび加速操作検出部13cと、認識カーブに対する依存判定距離を算出する依存判定距離算出部19aと、運転者の安全装置18に対する依存度を推定する依存度推定部19と、備え、依存度推定部19は、自車位置検出部12により検出された自車位置と認識カーブ入口との距離が依存判定距離算出部19aにより算出された依存判定距離以下であり且つ乗員の加速意志が検出された場合には、運転者が安全装置18に対し依存していると推定するとともに、運転者が安全装置18に対し依存していると推定した場合には安全装置18の作動が抑制されるように設定を変更する。
(もっと読む)
1 - 20 / 47
[ Back to top ]