
Fターム[3D043EA05]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDの動力伝達装置 (2,416) | 原動機 (1,196) | 電動機による駆動 (366)
Fターム[3D043EA05]に分類される特許
1 - 20 / 366
四輪駆動車両
四輪駆動車
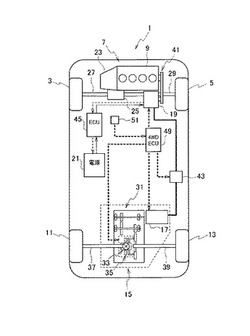
【課題】車両の動力系を簡素化することができる四輪駆動車を提供する。
【解決手段】四輪駆動車1が、前輪3,5側の動力伝達機構7の駆動源となるエンジン9と、後輪11,13側の動力伝達機構15の駆動源となる電動モータ17と、エンジン9の作動によって発電し電動モータ17を作動させる起動源であると共にエンジン9を停止状態から作動状態にさせるスタータであるモータジェネレータ19と、このモータジェネレータ19がスタータであるときモータジェネレータ19に電力を供給する電源21とを有した。
(もっと読む)
アクチュエータ制御装置

【課題】四輪駆動車に適用して有効なアクチュエータ制御装置を提供する。
【解決手段】アクチュエータ制御装置100は、正逆回転可能なアクチュエータ17、アクチュエータ17の回転運動を直線運動に変換する変換部材40、変換部材40の移動を規制して変換部材40の位置を検出するチェック機構60、アクチュエータ回転変位検出用のセンサ102、及びセンサ102からの信号に基づいてアクチュエータ回転位置を制御する制御部103を備える。制御部103は、アクチュエータ17を一方側へ所定の角度で回転させた後、他方側へ回転させる通電処理を行い、チェック機構60を介して変換部材40の移動を規制してアクチュエータ17の回転が停止する位置をアクチュエータ回転開始点となる基準位置とするように構成されている。
(もっと読む)
車両の運動制御装置
【課題】
日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】
前輪及び後輪の駆動力又は/及び制動力を制御可能な車両の運動制御装置において、横軸に車両の前後加速度、縦軸に車両の横加速度をとるダイアグラムを定義したときに、時間の経過とともに当該ダイアグラム上で曲線的な遷移をするように加減速制御指令を決定するコントローラと、加減速制御指令に基づいて、制動力又は/及び駆動力を決定する制動力駆動力配分部と、を有する。
(もっと読む)
ホイールローダ
【課題】車輪を電動機で駆動するホイールローダにおいて、後輪がスリップした場合において大きい駆動力を得ることができるようにする。
【解決手段】前輪WFA、WFBは、前輪側アクスル22Fを介して後輪側プロペラシャフト25R2に連結され、後輪WRA、WRBは、後輪側アクスル22Rを介して後輪側プロペラシャフト25R2に連結されている。前輪側プロペラシャフト25Fには前輪用電動機MFが取り付けられ、後輪側プロペラシャフト25R2には後輪用電動機MRおよびクラッチCLが設けられている。掘削作業中であって、前輪WFA、WFBと後輪WRA、WRBの回転数差が所定の回転数差を超えた場合には、クラッチCLがオン駆動され、前輪側プロペラシャフト25Fと後輪側プロペラシャフト25R2とが連結される。
(もっと読む)
作業車両のハイブリッド駆動システム
【課題】エンジンの動力に電動モータの動力を組み合わせ、車軸とPTO軸を駆動する、従来の作業車両のハイブリッド駆動システムでは、モータ駆動時には、発電機−電動モータ系が一種の無段変速装置として作動するが、エンジン駆動時には、エンジンから車軸・PTO軸までのトレーンにはギア式有段変速装置しか介装されておらず、モータ駆動とエンジン駆動間の切換前後で変速操作の操作感覚が大きく異なる、という問題があった。
【解決手段】エンジン3から後輪7・7まで動力を伝達する走行系トレーン52に無段変速装置である主変速装置14を介装すると共に、該走行系トレーン52と、前記エンジン3からPTO軸11まで動力を伝達するPTO系トレーン53との両トレーンにおける動力伝達経路最上流位置にモータジェネレータ4を設けた。
(もっと読む)
車両の駆動装置
【課題】電動機の駆動や回生が不要な場合に電動機の連れ回りを防止でき、且つ、発進時の応答性を向上させることが可能な駆動装置を提供する。
【解決手段】遊星歯車式減速機12Aのリングギヤ24Aと遊星歯車式減速機12Bのリングギヤ24Bとに対し一方向の動力のみを伝達し他方向の動力を遮断する一方向クラッチ50が配置される。一方向クラッチ50はインナーレース51とアウターレース52とを備える。遊星歯車式減速機12Aのリングギヤ24Aと遊星歯車式減速機12Bのリングギヤ24Bとを、一方向クラッチ50のインナーレース51に結合させることによって一体回転可能に構成する。
(もっと読む)
車両駆動システム及びこれを備えたハイブリッド自動車
【課題】モータ・ジェネレータの回生駆動状態に応じて、従動状態の車輪に対するデファレンシャル機構の連動回転による慣性重量を低減可能な車両駆動システム及びハイブリッド自動車を提供する。
【解決手段】一対の前輪17を出力駆動により従動状態から駆動状態とすると共に前輪17の従動状態で回生駆動による充電が可能なフロント・モータ5と、前輪17側と連動回転するデフ・ケース41aを有し該デフ・ケース41aに入力されたフロント・モータ5の出力トルクを前輪17に伝達するフロント・デフ15とを備え、該フロント・デフ15に、前輪17の従動状態でフロント・モータ5の回生駆動状態に応じて少なくとも前輪17に対するデフ・ケース41aの連動回転を切り離す車軸クラッチ55aを設けたことを特徴とする。
(もっと読む)
電動トラクタ
【課題】作業状態等を的確に把握してエネルギ回収効果の高い電動トラクタを具現しようとする。
【解決手段】機体1に耕耘作業機41を昇降自在に装着し、バッテリーに接続され後輪出力軸12に駆動出力する後輪用モータ10と前輪出力軸25に駆動出力する前輪用モータ11を夫々設け、前輪用モータ11を前輪出力軸25側からの発電出力を受けて発電状態に切換わる構成とする。前輪用モータ11の回路に充電器を接続し、前輪出力軸25側からの発電出力を受けて発電し前記バッテリーを充電する。発電作用により前輪2にブレーキ作用を付与し、耕耘作業機41のロータリ爪の回転による所謂ダッシングを防止する。
(もっと読む)
車両
【課題】電動機の連れ回りにおける電力損失を抑制可能な車両を提供する。
【解決手段】後輪駆動装置1の駆動力が略零の状態で車両3を駆動するとき若しくは前輪駆動装置6の駆動力のみによって車両3を駆動するときに、制御装置8は、油圧ブレーキ60A、60Bを締結して接続状態とするとともに、油圧ブレーキ60A、60Bを接続状態とすることによって生じる電力変換装置の入力側電力を低減するように電力変換装置を制御する電力低減制御を行なう。
(もっと読む)
車両用駆動装置
【課題】制御を簡易化でき、ヨーモーメントを発生させることのできる車両用駆動装置を提供する。
【解決手段】後輪駆動装置1は、左後輪LWrを駆動する電動機2Aと、電動機2Aと左後輪LWrとの動力伝達経路上に設けられた遊星歯車式減速機12Aと、を有する左車輪駆動装置と、右後輪RWrを駆動する電動機2Bと、電動機2Bと右後輪RWrとの動力伝達経路上に設けられた遊星歯車式減速機12Bと、を有する右車輪駆動装置と、電動機2A、2Bを制御する制御装置8と、を備える。遊星歯車式減速機12A、12Bのサンギヤ21A、21Bにそれぞれ電動機2A、2Bが接続され、プラネタリキャリア23A、23Bにそれぞれ左後輪LWr及び右後輪RWrが接続され、リングギヤ24A、24B同士が互いに連結される。制御装置8は、リングギヤ24A、24Bの回転を目標回転に制御する回転制御を行なうとき、電動機2A、2Bのいずれか一方のみを駆動制御してリングギヤ24A、24Bの回転を制御する。
(もっと読む)
車両の制御装置
【課題】アクセルオフ時の旋回初期の車両安定性を確保する。
【解決手段】アクセルオフによるエンジンブレーキ作動状態で、前輪が路面から受けるトルク(反力トルク)が、後輪が路面から受けるトルクよりも大きい場合(前輪回転数<後輪回転数の場合)には四輪駆動状態にする。このような制御によりエンジンブレーキ作動時(減速時)に四輪駆動状態にすることによって、前輪が路面から受けるトルクの一部が後輪に伝達される。これにより前輪の縦方向(車両が進む方向)の路面摩擦力が小さくなって、前輪の横力が大きくなるので、アクセルオフでの旋回初期の回頭性が向上する。その結果として、アクセルオフでの旋回初期における車両安定性を確保することができる。
(もっと読む)
車両
【課題】電動機の連れ回りにおける損失を抑制可能な車両を提供する。
【解決手段】後輪駆動装置1の駆動力が略零の状態で車両3を駆動するとき若しくは前輪駆動装置6の駆動力のみによって車両3を駆動するときに、制御装置8は、油圧ブレーキ60A、60Bを締結して接続状態とするとともに、油圧ブレーキ60A、60Bを接続状態とすることによって後輪Wrに伝達される電動機2A、2Bと動力伝達経路の少なくとも一方の損失を低減するように電動機2A、2Bを制御する損失低減制御を行なう。
(もっと読む)
車両用駆動装置
【課題】断接手段の接続を精度よく行うことのできる車両用駆動装置を提供する。
【解決手段】実施形態の後輪駆動装置1は、車両の駆動力を発生する電動機電動機2A、2Bと、電動機2A、2Bと後輪LWr、RWrとの動力伝達経路上に設けられ、解放又は締結することにより電動機側と車輪側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに、油圧ブレーキ60A、60Bの遮断状態と接続状態との切り替えを制御する制御装置8と、を備え、制御装置8が、油圧ブレーキ60A、60Bを遮断状態から接続状態に移行するときに、遮断状態で電動機2A、2Bを駆動制御して電動機2A、2B側の回転数が目標回転数となるように回転合わせ制御を行なう。回転合わせ制御において電動機2A、2Bが消費する電力である回転合わせ電力を求め、回転合わせ電力に基づいて電動機2A、2Bの回転合わせ制御における駆動開始時期を設定する。
(もっと読む)
ハイブリッド車両の動力伝達装置
【課題】ハイブリッド車両における動力伝達効率を向上させる。
【解決手段】この動力伝達装置に搭載される無段変速機構10のプライマリ軸11にはエンジン出力軸15とモータ出力軸41とが連結されている。駆動輪に連結される出力伝達軸57とセカンダリ軸12との間には、これらの軸を連結状態と開放状態とに切り換える出力クラッチ63が配置され、プライマリ軸11と出力伝達軸57との間には、これらの軸を連結状態と開放状態とに切り換える駆動切換クラッチ71が配置されている。出力クラッチ63を開放状態とし駆動切換クラッチ71を連結状態とする直結モードのもとでは、エンジン出力は無段変速機構10を介することなく駆動輪に伝達される。
(もっと読む)
前後駆動力配分比制御装置
【課題】加速応答性の向上と旋回性能の向上とを両立させることのできる四輪駆動車の前後駆動力配分比制御装置を提供することを目的とする。
【解決手段】車両における前輪と後輪との駆動力を変化させることのできる前後駆動力配分比制御装置において、前後加速度が生じる場合の目標スタビリティファクタを求める目標値算出手段(ブロックB2)と、前記目標値算出手段によって求められた目標スタビリティファクタと車両に実際に生じている前後加速度に応じて変化する加速度検出値とに基づいて前輪と後輪との少なくともいずれか一方に対する駆動力の配分比を求める前後配分比算出手段(ブロックB3〜B7)とを備えている。
(もっと読む)
電気自動車
【課題】 左右の車輪を個別に駆動する複数のモータを備えた電気自動車において、1輪分のモータ異常が発生した場合に、停止させることなく、車両姿勢の安定化を図って走行を可能とする。
【解決手段】 各モータ6の異常を検出するモータ異常検出手段37と、片側異常時対応制御手段38とを設ける。片側異常時対応制御手段38は、モータ異常検出手段37により、車両の同じ前後方向位置にある左右のいずれか一方の車輪2,3のモータ6にモータ停止以外の異常が検出された場合に、同じ前後方向位置にある他方の車輪2,3のモータ6を、異常の検出されたモータ6の動作状態と同じ動作状態に近づくように制御する。この制御は、他方のモータ6のトルクを強制的に減じる制御、回生ブレーキとして作用させる制御、他方の車輪2,3のブレーキ作動の制御等とする。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなえること。
【解決手段】トルク配分装置100は、入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて駆動輪のスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値と最適効率トルク値に基づいて各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなわれること。
【解決手段】入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて、駆動輪におけるスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて、駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値、および、最適効率トルク値に基づいて、各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて、各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなえること。
【解決手段】トルク配分装置100は、入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて、駆動輪におけるスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて、駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値と最適効率トルク値に基づいて、各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて、各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
1 - 20 / 366
[ Back to top ]