
Fターム[3D046HH29]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 重量 (105)
Fターム[3D046HH29]に分類される特許
1 - 20 / 105
車両用ブレーキ制御装置
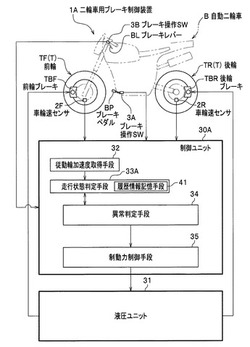
【課題】ウィリー走行中であっても、車輪速センサの異常判定をより精度良く行える車両用ブレーキ制御装置を提供することを目的とする。
【解決手段】二輪車用ブレーキ制御装置1Aは、前輪TF、後輪TRの車輪速度を取得する車輪速センサ2F、2R、液圧ユニット31、制御ユニット30Aを備えている。制御ユニットは、前輪車輪速度から車輪加速度を取得する従動輪加速度取得手段32と、車輪加速度に基づいて走行状態を判定する走行状態判定手段33Aと、車輪速センサの異常の有無を判定する異常判定手段34と、液圧ユニットを制御する制動力制御手段35を有している。異常判定手段は、後輪が非停止状態を示し、前輪が停止状態を示している場合に、走行状態判定手段に前輪が浮き上がったままの走行状態かどうか判定させ、その結果に基づいて前輪の車輪速センサに異常が有るか否かを判定する。
(もっと読む)
車両の横転防止装置

【課題】トラクタヘッド側でトレーラのロール角検出が正確に行える連結車両の横転防止装置を提供する。
【解決手段】トラクタのロール角を推定するトラクタロール角推定部(1)と、トラクタとトレーラの連結総重量を推定する連結総重量推定部(2)と、トラクタ及びトレーラを結合するカプラーが受ける荷重を推定する荷重推定部(3)と、該荷重と該連結総重量とトラクタロール角から、トレーラのロール角を推定演算するトレーラロール角推定部(4)と、を備える。
(もっと読む)
産業車両の走行制御装置
【課題】走行状態中に運転者が離席した場合であっても、走行安定性の低下を抑制しつつ、回生制動によって停止距離の低減を図ること。
【解決手段】走行状態中に運転者の離席を検出した場合は回生制動を掛け、その際には車両の状態に応じて回生制動の強さを変更するように制御する。この制御は、回生制動の強さに対し、荷重の条件と、揚高の条件と、ティルト角の条件を予め対応付けておく。具体的に言えば、揚高については低揚高よりも高揚高の方が回生制動の強さを弱くし、ティルト角については後傾側よりも水平・前傾側の方が回生制動の強さを弱くする。これにより、回生制動は、車両の状態に応じた強さで掛けられ、車両の走行安定性の低下が抑制される。また、回生制動により、車両の停止距離の低減が図られる。
(もっと読む)
クラッチ操作検出装置及び当該装置を利用した車両質量推定装置
【課題】 簡単かつ安価な構成で、精度良くクラッチの切断操作を検出する。
【解決手段】 S3で、クラッチスイッチ(CSW)8がONか否かを判断する。YESであれば、運転者がクラッチペダルを踏んでいる状態が継続していると判断してS4へ進む。NOの場合にはS11へ進み、CSW8のチャタリング等による誤推定を排除するため、加速度データが1秒分あるか否かを判断する。YESであればS12で車両質量推定を実行し、NOであればS13で質量推定を無効とする。S4では、CSW8のON状態が4秒経過したか否かを判断し、YESであればS5へ進み、NOであればS7へ進む。S5ではエンジン回転数が所定値TNeより低いか否かを判断し、YESであれば変速操作が継続されていると判断しS6へ進む。NOであれば、CSW8がON状態であるにも拘わらずエンジン回転数が所定値TNe以上であるため、足載せ運転状態であると判断しS8へ進む。S6では車両質量推定を実行し、S7では質量推定を無効とする。
(もっと読む)
制駆動力制御装置、自動車及び制駆動力制御方法
【課題】目標前後加速度及び目標ヨーモーメントを発生させる制御時に、車両挙動をより安定化すること。
【解決手段】目標前後加速度αに基づいて目標合計制駆動力Fdを設定し、その目標合計制駆動力Fdを目標ヨーモーメントに基づいて左前後輪13FL、13RL及び右前後輪13FR、13RRに分配し、左前後輪13FL、13RLの摩擦円利用率qijの差及び右前後輪13FR、13RRの摩擦円利用率qijの差がそれぞれ小さくなるように前記左右輪に分配された目標合計制駆動力Fdを前輪及び後輪に分配した。そのため、摩擦円利用率qijが高い車輪の制駆動力が低減され、摩擦円利用率qijが低い車輪により多くの制駆動力が配分されるので、目標前後加速度α及び目標ヨーモーメントMを発生させる制御時に、特定の車輪13FL〜13RRだけタイヤグリップ力限界を超えることを防止でき、車両挙動がより安定化される。
(もっと読む)
制駆動力制御装置
【課題】制動力発生装置に経年変化や異常が生じても各車輪に適切な制動トルクを発生させること。
【解決手段】車輌の目標制動力と実際の車輌の制動力との差が所定値を超えたときに油圧制動トルク発生装置(ブレーキアクチュエータ23等)又はモータ31FL,31FR,31RL,31RRに異常ありと判定する制動装置異常判定手段41iを設け、この制動装置異常判定手段41iが異常ありと判定した際に、車輌の目標制動力と実際の車輌の制動力とを一致させるように設定された各車輪10FL,10FR,10RL,10RRの内の少なくとも一輪と残りの車輪の夫々の全制動トルク間の相対関係に基づいて要求機械制動トルク又は要求モータトルクを補正するよう要求油圧制動トルク設定手段41f又は要求モータトルク設定手段41gを構成すること。
(もっと読む)
車両運動制御方法および車両運動制御装置
【課題】 コスト増や運転の違和感を伴うことなく、ヨーレートの制御精度の向上を図ることができる車両運動制御方法および車両運動制御装置を提供する。
【解決手段】 ヨーレートγを検出するヨーレートセンサと、ヨー角加速度推定値dγhatに基づいて、ヨーレートγhatを推定する積分器102jと、ヨーレート操作量と、ヨーレート検出値γとヨーレート推定値γhatとの偏差であるヨーレート偏差(γ-γhat)と、このヨーレート偏差の積分値と、に基づいて、ヨー角加速度dγhatを推定するヨー角加速度推定部102と、目標ヨーレートtγとヨーレート検出値γとヨー角加速度推定値dγhatとに基づいて、ヨーレートの目標応答を満たすヨーレート操作量(フィードバック前輪舵角操作量δfFB,フィードバック後輪左右駆動力差操作量uFB)を演算するF/B指令部103と、を備える。
(もっと読む)
車両のブレーキ制御装置
【課題】ドライバが車両を所定の目標位置に停止させようとするとき、不要なブレーキング操作が行われた際に、無用な加減速を生じることなく、滑らかに停止位置で停止させ、搭乗者に不快感を与えることがない。
【解決手段】制御ユニット5では、認識された白線データ、立体物データから停止位置候補P1〜Pnを抽出し、これらの位置L1〜Lnを取得して、現在のブレーキ操作量θp、車速Vに基づいて求めた制動距離Lbに最も近いものを目標停止位置Ltとして設定する。目標停止位置Ltから学習値LLを減算して補正目標停止Ltcを演算し、補正目標停止Ltc、車速Vに基づいてブレーキ操作量補正値θpcを設定する。そして、ブレーキ操作量θpとブレーキ操作量補正値θpcとの差の絶対値|θp−θpc|が、設定範囲の際にブレーキ操作量補正値θpcによるブレーキ制御を実行する。
(もっと読む)
電動パーキングブレーキ装置
【課題】 ギア位置スイッチの数を増やすことなく、2つのギア位置スイッチのいずれかの固着故障によりスイッチ信号の組み合わせにより判定されるギア位置が誤っていても、パーキングブレーキの解除や継続を支障なく行うことができる電動パーキングブレーキ装置を提供すること。
【解決手段】 クラッチ2とマニュアルトランスミッション3を有する駆動系を備え、パーキングブレーキ作動による停止時、ギア位置が前進または後退と判定され、自動解除条件が成立したとき、パーキングブレーキを自動的に解除する電動パーキングブレーキ装置において、2つのニュートラルスイッチ35とリバーススイッチ36からのスイッチ信号の組み合わせにより判定した変速ギア位置と、エンジン1の駆動力が左右後輪タイヤ8,9へ伝達可能なクラッチ接続状態で生じる駆動系回転変化により判定される変速ギア位置と、が一致しないとき、システム故障であると判定する故障判定手段(図3)を設けた。
(もっと読む)
車間自動制御装置
【課題】 本発明は、安全な車間距離を自動的に確保するための車間自動制御装置に関し、車両の積載重量を荷重計により測定することなく積載重量を推定し適正車間の制御を行うことを目的とする。
【解決手段】 車両に積載される荷物の積み下ろし情報を入力する入力手段と、前記積み下ろし情報に基づいて現在の車両の重量を求める重量算出手段と、前記重量算出手段で求められた前記車両の重量に基づいて前記車両の速度を適正車間になるように制御する制御手段とを有することを特徴とする。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御をABSの制動力調整機能を転用して行う。このときに、少なくとも最初の段階の自動制動制御における制御パラメータを予め導出して保持することにより、遅延のない自動制動制御を実現する。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御をABSの制動力調整機能を転用して行う。このときに、段階的な制動制御の実行中に運転者による急制動操作を検出したときには段階的な制動制御を中止して所定の制動力または制動減速度(例えば、自車が有する最大の制動力または制動減速度)により制動を実行する。あるいは、検出した運転者による急制動操作により発生すると予想される制動力または制動減速度が現時点における段階的制動制御により発生している制動力または制動減速度よりも大きいときには、段階的制動制御を中止し、運転者の急制動操作を優先させる。
(もっと読む)
サスペンション制御装置
【課題】アクチュエータのストロークを保持しながら輪荷重を増加させることで急制動時の制動性能向上を長時間にわたって確保できるサスペンション制御装置を提供する。
【解決手段】車両2の制動状態が急制動である場合、制動制御信号27と通常制御信号26とを加算して得た補正通常制御信号28を油圧シリンダ13に出力し推力を発生させる。制動制御信号27が含まれる補正通常制御信号28に基づく油圧シリンダ13の伸縮制御により、推力の発生時には輪荷重が増減される。油圧シリンダ13の伸び制御により輪荷重が増加され、制動性能が向上し制動距離が短縮される。油圧シリンダ13の縮み制御により、油圧シリンダ13の伸びきりが抑制され、その分、ストロークが確保され、ひいては長時間にわたり制動性能を向上できる。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御をABSの制動力調整機能を転用して行う。このときに、自車の重量に応じて自動制動制御における制御パラメータを予め導出して保持することにより、遅延のない自動制動制御を実現する。
(もっと読む)
車両用センサ付き転がり軸受装置
【課題】 自動車のブレーキ操作時に、最大制動力を利用した制御を可能とする車両用センサ付き転がり軸受装置を提供する。
【解決手段】 センサ装置2は、超音波センサと、超音波センサの出力に基づいてタイヤ接地荷重の前後方向成分を求める前後荷重演算手段32と、タイヤ接地荷重の前後方向成分に基づいて車輪に与えるべきブレーキ力を演算するブレーキ力演算手段34とを備えている。ブレーキ力演算手段34は、タイヤ接地荷重の前後方向成分の変化量を求める前後力変化量演算部35と、タイヤ接地荷重の前後方向成分の変化量に所定係数をかけることによりブレーキ力制御のための信号を作成する信号作成部36とを有している。
(もっと読む)
編成列車のブレーキ制御方法
【課題】先頭車両に続く車両の車輪の摩耗を低減させる。
【解決手段】複数の車両1〜4を連結した編成列車5でブレーキ指令信号により指令されたブレーキ力を各車両1〜4の重量に対応した応荷重信号に基づいて車両1〜4毎に負担するブレーキ力を演算する編成列車のブレーキ制御方法において、雨天時を意味する雨天信号が入力された場合に先頭車両1の応荷重信号を0より大きく1より小さい所定の軽減係数を乗じた値として各車両1〜4毎に負担するブレーキ力を演算するようにしたものである。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御を行う。なお、段階的な制動制御を行う必要のある状況下において、姿勢制御手段による横すべり抑止制御が実行されたときには、段階的な制動制御を禁止し、運転者に対し、段階的な制動制御が必要な状況下にあることを警報により報知する。
(もっと読む)
車両およびその制御方法
【課題】後進方向に走行している際の制動時に十分な制動力を得ると共に車両の安定性を確保する。
【解決手段】車両の後進制動時には、前進制動時の前後比よりも後輪の比率が大きくなる荷重に応じた前後比をもって前後輪に制動力が付与されるよう、運転者の踏力に基づいて発生されたマスタシリンダ101のマスタシリンダ圧Pmcをポンプ115,125により加圧して後輪のホイールシリンダ109c,109dの油圧として供給すると共に減圧ソレノイドバルブ113a,123bのオン/オフ制御により減圧して前輪用のホイールシリンダ109a,109bの油圧として供給する。これにより、後進制動時には進行方向として前方に位置する後輪により大きな制動力を付与して十分な制動力を得ると共に前輪がロックするのを抑制することができる。
(もっと読む)
制御装置及び車両
【課題】停車時のブレーキショックを運転者の技量によらず抑制することができる制御装置及び車両を提供すること。
【解決手段】油圧式の制動装置における制動力は、停車直前の低速領域におけるブレーキペダルの操作に対して、オンかオフかという極端な効き方となるため、ブレーキペダルの操作量を微妙にコントロールして、制動力を細かに制御することが困難であった。これに対し、本発明では、車輪のトウ角を機械的に増減させて制動力を制御する方式であるので、停車直前の低速領域においてもリニアな制動力を得ることができる。更に、停車直前の低速領域では、車両の速度の減少に伴って、前輪のトウ角の絶対値を減少させると共に後輪のトウ角を増加させるので、停車直後の車両の揺り返し挙動を抑制して、停車時のブレーキショックを抑制することができる。
(もっと読む)
センサ付車輪用軸受
【課題】 車両にコンパクトに荷重検出用のセンサを設置できて、車輪にかかる荷重を感度良く検出でき、量産時のコストが安価となるセンサ付車輪用軸受を提供する。
【解決手段】 外方部材1と内方部材2の間に複列の転動体3を介在させ、車体に対して車輪を回転自在に支持する車輪用軸受において、前記外方部材1および内方部材2のうちの固定側部材にセンサユニット21を取付ける。例えば、固定側部材が外方部材1とする。センサユニット21は、センサ取付部材22およびこのセンサ取付部材22に取付けた少なくとも1つ以上の歪みセンサ23からなる。外方部材1は、ナックル16と接触するナックル接触部1aの一部に切欠き部17を有する。
(もっと読む)
1 - 20 / 105
[ Back to top ]