
Fターム[3D046HH46]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 路面状態 (350) | 摩擦係数(μ) (134)
Fターム[3D046HH46]の下位に属するFターム
前後方向(ジャンプμ) (4)
左右方向(スプリットμ) (10)
Fターム[3D046HH46]に分類される特許
1 - 20 / 120
四輪駆動車の制御装置
【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
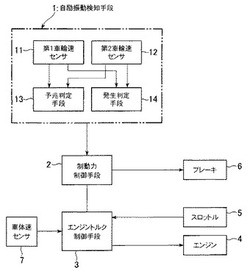
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、ブレーキペダル操作と独立に、四輪駆動車の主駆動輪及び/又は副駆動輪に所定の制動力を作用させる制動力制御手段2とを備える。
(もっと読む)
四輪駆動車の制御装置

【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、自励振動の発生に関係する少なくとも一つの要素の量を自動的に変更して、自励振動を制御する自励振動制御手段2とを備え、自励振動制御手段2は、アクセルペダル操作と独立に、エンジントルクを制御するエンジントルク制御手段21を備える。
(もっと読む)
制動制御装置
【課題】前輪と後輪が回生について非対称である車両について、要求総制動力に対する制御精度が高くて滑らかな制動を可能とし、しかも走行安定性を確保しつつ回生量を増加させることができるようにする。
【解決手段】制動制御装置は、要求総制動力の配分を制御する制動力配分手段を備えており、制動力配分手段は、回生配分で要求総制動力の配分を行う。そしてその回生配分は、前輪と後輪が同時にロックする配分を与える理想配分線ILよりも後輪に配分率が偏る後輪優位の範囲であり、かつ制動時の路面摩擦係数との関係で後輪がロックする後輪ロック限界線μ2L以下の範囲であることを条件とし、さらに要求総制動力の変化に伴う前輪制動力の変化に対する後輪制動力の変化の比率である後輪制動力変化率が常に正となることを条件とするようにされている。
(もっと読む)
摩擦状態推定装置、自動車および摩擦状態推定方法
【課題】車輪と路面との間における摩擦状態をより正確に推定すること。
【解決手段】摩擦状態推定手段が、ブレーキパッドに印加される圧力と車輪の回転状態との関係、あるいは、ナックルとブレーキキャリパとの締結部に生じる歪みの少なくとも何れかを示す物理量に基づいて、車輪の摩擦状態(安定/不安定)を判定する。したがって、車輪と路面との間における摩擦状態をより正確に推定することができる。
(もっと読む)
自動制動装置
【課題】車両の走行状態や運転者の操舵入力又は制動入力に対する車両の走行状態の応答特性に合わせてタイミングよくブレーキを自動作動させることのできる自動制動装置を実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突を操舵により回避可能な障害物までの操舵回避距離を算出する操舵回避距離算出手段と、自車両と障害物との実距離Lが前記操舵回避距離より短くなるとブレーキ15を自動作動させる自動ブレーキ作動手段と、自車両の走行状態を検出する走行状態検出手段5と、を備え、走行状態検出手段5の検出結果に基づいて、操舵により障害物への衝突を回避すると自車両が不安定になると判断される場合には、自動ブレーキ作動手段によるブレーキ15の自動作動開始時期を早めるように、前記自動ブレーキ作動手段を構成する。
(もっと読む)
タイヤ接地状態推定方法、タイヤ接地状態推定装置、タイヤ、及び、車輌制御装置
【課題】簡単な構成で走行中のタイヤの接地状態を精度よく推定することができるとともに、路面変化に対する追従性の高いタイヤの接地状態推定方法とその装置、タイヤの接地状態の推定に用いられるタイヤ、及び、車輌制御装置を提供する。
【解決手段】加速度センサ11をタイヤの赤道部近傍のブロック23B内部に、その検出方向がタイヤ回転方向になるように埋設するとともに、上記加速度センサ11の検出出力から蹴り出し時における上記ブロック23Bのタイヤ回転方向の振動波形を抽出し、この振動波形正側のピーク値Gの大きさに基づいて走行中のタイヤの接地状態を推定するようにした。
(もっと読む)
車両の制動制御装置
【課題】センターデフロック状態又は直結4輪駆動状態であっても、制動制御を行い、運転者の運転を適切に支援できる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車輪への制動力を制御して、車両の旋回中の挙動を安定させる車両の制動制御装置80であって、
前記車両の旋回状態を検出する旋回状態検出手段10と、
該旋回状態検出手段により検出された旋回状態に基づいて、前記車両の各車輪の制動制御量を設定する制動制御量設定手段20と、
該制動制御量設定手段により設定された制動制御量に基づいて、前記各車輪の制動制御を行う制動制御手段50と、
前記車両が走行している路面の路面摩擦係数を推定する路面摩擦係数推定手段30とを備え、
前記制動制御量設定手段は、前記車両がセンターデフロック状態又は直結4輪駆動状態のときには、前記各車輪の制動制御量の上限を、前記路面摩擦係数推定手段により推定された路面摩擦係数に応じて変更することを特徴とする。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
路面状態の推定方法、路面状態の推定装置、タイヤ、及び車輌制御装置
【課題】簡単な構成で車輌が走行している路面の状態を精度よく推定することができるとともに、路面変化に対する追従性の高い路面状態の推定方法とその装置、及び、路面状態の推定に用いられるタイヤを提供する。
【解決手段】歪ゲージ11をタイヤの赤道部近傍のブロック内部の、タイヤ周方向に直交する面内に、その検出方向がほぼ当該ブロックのタイヤ径方向になるように埋設するとともに、上記歪ゲージ11の検出出力から圧縮歪の時間変化の波形を抽出し、この圧縮歪波形のタイヤ接地面内におけるピークのピーク減少量Bを求め、ピーク減少量Bの大きさに基づいてタイヤの走行する路面状態を推定するようにした。
(もっと読む)
走行路面状態検出システム及びそのセンサユニット
【課題】低速から高速までのあらゆる速度での車両走行時における走行路面状態を迅速且つ的確に検出できる走行路面状態検出システム及びそのセンサユニットを提供する。
【解決手段】タイヤ2に設けられたセンサユニット100によって、タイヤ2の回転方向の加速度信号に重畳する微小振動を検出し、この微小振動信号を所定時間積分した積分値をディジタル情報としてモニタ装置200に送信する。モニタ装置200は、積分値が小さいときに走行路面とタイヤ2との間の摩擦が大きく、積分値が大きいときに走行路面とタイヤ2との間の摩擦が小さいとして、積分値と摩擦の大小を対応づけた路面状態情報をスタビリティ制御ユニット700に出力する。スタビリティ制御ユニット700は路面状態情報に基づいて制動制御等を行う。
(もっと読む)
シミュレーションシステム
【課題】実車による制動試験に近いABS制動シミュレーションを行うことができるシミュレーションシステムを提供する。
【解決手段】シミュレーションシステムは、ABS制動シミュレーションを行うHILSによって構成され、車両の運動を表現する車両モデル1及びタイヤの運動を表現するタイヤモデル2を有するソフトウェア3と、車両モデル1と情報の受渡しを行うブレーキの油圧系部品4及び車両モデル1からの情報に応じて油圧系部品4を制御するABS制御ユニット5を有するハードウェア6とを具える。車両モデル1は、タイヤのスリップ率、車両の上下荷重及び車体速度の情報をタイヤモデル2に供給し、タイヤモデル2は、タイヤのスリップ率、車両の上下荷重及び車体速度の情報に基づいて、実路面上で計測したABS制動中のタイヤμを算出する。
(もっと読む)
制動装置の制動利得特性が可変に制御される車輌
【課題】摩擦係数が低い低μ路に於いて制動時の車輪スリップを抑制しつつ許容される時間内に十分な減速効果を上げることができるようにする一方、摩擦係数が高い高μ路に於いては軽い制動操作で快適な制動が達成されるようにする。
【解決手段】路面の摩擦係数の大小を判別し、低μ路に於いてはブレーキペダルの踏量に対する制動力の増大率を表す制動利得を踏量が小さいとき小さくし、踏量が大きいとき大きくし、また高μ路に於いては踏量が小さいとき大きくし、踏量が大きいとき小さくする。
(もっと読む)
車両の制動制御装置
【課題】 旋回挙動の安定性を確保しつつ、実用燃費の向上を図ることができる車両の制動制御装置を提供する。
【解決手段】 ブレーキコントローラ5は、推定アンダーステア量sestunderが大きいほど小さな1次回生制限値slimregenを設定する1次回生制限値演算部316aと、ドライバ要求制動トルクsbknsと実回生制動トルクERとの偏差が大きいほど、2次回生制限値REG_LIMを大きく設定する2次回生制限値演算部316dと、1次回生制限値slimregenと2次回生制限値REG_LIMのセレクトローにより目標回生制動トルクの上限値である回生量制限値slimregenを選択するセレクトロー演算部316eと、を備える。
(もっと読む)
路面摩擦状態推定方法、路面摩擦状態推定装置、及び、路面摩擦状態推定用タイヤ
【課題】タイヤと路面との間の摩擦状態を精度良く推定する方法とその装置、及び、路面摩擦状態の推定に用いられる路面摩擦状態推定用タイヤを提供する。
【解決手段】タイヤトレッドの幅方向中心に位置する陸部内に埋設した垂直応力検出手段11a及び剪断応力検出手段11bとにより、上記陸部のトレッドゴムに作用する垂直応力σzとタイヤ周方向の剪断応力τxとを検出した後、応力比算出手段12にて応力比rx=(τx/σz)を算出し、この応力比rxと上記垂直応力σzのデータとを車体側の路面摩擦状態推定装置20に送信し、接地中心位置から路面蹴出し点の間の領域の最大値rbを抽出し、上記抽出された最大値rbと上記記憶手段24に記憶されたr−μマップ24Mとに基づいて、路面とタイヤとの間の路面摩擦係数μを推定するようにした。
(もっと読む)
車両のブレーキ制御装置
【課題】ドライバが車両を所定の目標位置に停止させようとするとき、不要なブレーキング操作が行われた際に、無用な加減速を生じることなく、滑らかに停止位置で停止させ、搭乗者に不快感を与えることがない。
【解決手段】制御ユニット5では、認識された白線データ、立体物データから停止位置候補P1〜Pnを抽出し、これらの位置L1〜Lnを取得して、現在のブレーキ操作量θp、車速Vに基づいて求めた制動距離Lbに最も近いものを目標停止位置Ltとして設定する。目標停止位置Ltから学習値LLを減算して補正目標停止Ltcを演算し、補正目標停止Ltc、車速Vに基づいてブレーキ操作量補正値θpcを設定する。そして、ブレーキ操作量θpとブレーキ操作量補正値θpcとの差の絶対値|θp−θpc|が、設定範囲の際にブレーキ操作量補正値θpcによるブレーキ制御を実行する。
(もっと読む)
車線逸脱防止装置
【課題】自車両の車線逸脱防止に必要なヨーモーメントを確保する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御の制御量の不足量を取得するとともに(ステップS3)、その不足量に基づいて、車線逸脱防止制御の制御終了タイミングを変更する一方で(ステップS5)、走行車線に対する自車両の逸脱傾向を判定し(ステップS4、ステップS8)、その結果、車線逸脱傾向がある場合、走行制御により走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行うとともに、前記変更した制御終了タイミングになったときに、車線逸脱防止制御を終了する(ステップS9〜ステップS11)。
(もっと読む)
制動力制御装置
【課題】減速制御の制御効果を高めつつ、ポンプモータの寿命が無駄に低下することを防止すること。
【解決手段】運転者のブレーキ操作が検出されている場合には、ブレーキ操作が検出されていない場合よりも、ポンプモータ17の回転数を低くするようにした。そのため、旋回走行時に、運転者がブレーキ操作をしている場合、つまり、運転者がブレーキ操作をしていない場合に比べ、減速制御によって小さく緩やかな減速度を発生すれば十分な場合には、ポンプモータの回転数17が低くなることで、ポンプモータ17の寿命を延ばすことや音振性能が悪化することを防止することができる。また、運転者がブレーキ操作をしていない場合、つまり、減速制御によって大きな制動力を発生する必要がある場合には、ポンプモータ17の回転数が高くなるので、ポンプモータ17による素早い昇圧により減速制御の制御効果を高めることができる。
(もっと読む)
制動力制御装置
【課題】減速制御中であってもアクセル操作で車両を加速でき、且つ、アクセル操作を行っても減速制御を継続できるようにすること。
【解決手段】アクセル操作によって車両を加速させようとする運転者の加速意思を実現するためのドライバ加速度意思要求トルクetrq-drvを算出し、車両の旋回時に減速制御が発生しようとするオーバスピード抑制トルクetr q-xgを算出し、そのドライバ加速度意思要求トルクetrq-drvからオーバスピード抑制トルクetrq-xgを減じた減算結果に基づいて車両が発生している駆動トルクを変動させるようにした。そのため、車両の旋回時に、運転者がアクセル操作を行うと、そのアクセル操作に応じてドライバ加速度意思要求トルクetrq-drvが大きく変動し、車両が発生している駆動トルクの変動量も大きくなり、減速制御中であっても車両を加速することができ、また、減速制御が中断されないので減速制御を継続することができる。
(もっと読む)
車両制御装置
【課題】カーブを走行する際、通過可能な車速となるように自車を減速させることができる車両制御装置を提供する。
【解決手段】カーブ道路を走行する際、そのカーブ道路に対して設定した目標速度Vs0_tまで自車を加減速するための目標加減速度dVs0/dtを算出し、自車の現在の速度Vs0と目標速度Vs0_tとを比較した結果に基づいて、自車に発生する加減速度が目標加減速度dVs0/dtとなるように加減速制御を行う。
(もっと読む)
自動二輪車用ブレーキ制御装置
【課題】後輪浮き上がりをより確実に抑制しつつ、操作フィーリングの向上を実現する。
【解決手段】自動二輪車用ブレーキ制御装置100は、自動二輪車の減速度に相関する減速度モニタ値を取得する減速度モニタ値取得手段21と、制動時の後輪浮き上がりが発生する限界減速度モニタ値に相関する制御目標値を設定する制御目標値設定手段23と、制御目標値に対する減速度モニタ値の不足分を監視し、その不足分の総和に相関する、不足分モニタ値を取得する不足分モニタ値取得手段24と、取得された不足分モニタ値が所与の第一条件を満たす場合に、ブレーキ装置の制動力の増加勾配を、制動力の増加制御開始時における増加勾配よりも大きく設定する制動力増加勾配設定手段25と、を備え、設定された増加勾配に基づいて車輪ブレーキの制動力を制動力制御手段26が制御する。
(もっと読む)
1 - 20 / 120
[ Back to top ]