
Fターム[3D050BB02]の内容
Fターム[3D050BB02]に分類される特許
1 - 20 / 453
走行装置
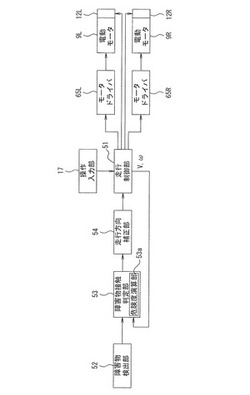
【課題】自律歩行が困難な歩行者を安全に先導することができる歩行支援装置を提供する。
【解決手段】移動方向を入力する操作入力部17を有するとともに、走行部を有して任意の方向に走行可能な自走体2と、前記操作入力部で入力された移動方向に基づいて前記自走体の走行を制御する走行制御手段51と、前記自走体の周囲の障害物の位置を検出する障害物検出手段52と、前記障害物検出手段で検出した障害物の位置情報と前記走行制御手段の指令値とに基づいて自走体の前記障害物への接触の有無を判定する障害物接触判定手段53と、該障害物接触判定手段の判定結果に基づいて前記走行制御手段の走行方向を補正する走行方向補正手段54とを備えている。
(もっと読む)
移送補助装置

【課題】 台車から荷物棚へ荷物を移送したり、荷物棚から台車へ荷物を移送したりする際に、台車が置かれている床が滑り易い状態であっても、台車を適切に固定できる。
【解決手段】 凸部1aを形成した下面を有し、台車に接続され、台車の荷台に対して上方に可動するように蝶番2を介して接続された板1と、荷物棚に接続され、凸部1aを収容する凹部3aを有する収容部3とを備える。台車を荷物棚の方向に移動させると、凸部1aの固定用傾斜と凹部3aの壁面とが接触して凸部1aに力が加わり、凸部1aが押し上げられて板1が上方向へ動く。さらに台車を移動させると、凸部1aの解除用傾斜が凹部3aの壁面に沿って動き、板1が自重により下方向へ動いて、凸部1aが凹部3aに収容されて、台車が荷物棚に固定される。また、台車と荷物棚との間を移送される荷物は板1上を移送されるので、板1に重みが加わり、凸部1aと凹部3aとの結合力がより強固となる。
(もっと読む)
電動アシスト台車
【課題】駆動力が電動モータによってアシストされる電動アシスト台車の安全性を向上する。
【解決手段】コントローラ(30)は、演算されたアシスト力を駆動輪(11)に付与するように電動モータ(15)を動作させ、荷台(3)の昇降の指示に応じて荷台昇降部(2)を昇降動作させ、操作検出部(29)がブレーキ(16)の制動の指示を検出した場合は、ブレーキ(16)を制動すると共に、トルク検出部(6)の検出結果にかかわらず電動モータ(15)の動作を禁止する。
(もっと読む)
電動アシスト台車
【課題】電動アシスト台車の安全性を向上する。
【解決手段】車体フレーム1に設けられる駆動輪11と、作業者によって押圧操作され車体フレーム1に駆動力を入力可能な操作ハンドル5と、操作ハンドル5の押圧操作によって車体フレーム1に作用する駆動トルクを検出するトルクセンサ6と、トルクセンサ6で検出した駆動トルクに応じて駆動輪11に付与するアシスト力を演算するコントローラ30と、演算されたアシスト力を駆動輪11に付与する電動モータ15と、駆動輪11を制動し所定の電流が流れたときに非制動状態に切り換えられるブレーキ16と、作業者によって操作されるとコントローラ30が所定の電流をブレーキ16に流すように指令するブレーキ解除スイッチ24とを備え、コントローラ30は、電源が入っていない状態でブレーキ解除スイッチ24が操作されている場合には、電源が入れられてもブレーキ16の制動状態を維持する。
(もっと読む)
電動アシスト台車
【課題】電動アシスト台車の安全性を向上する。
【解決手段】荷物を載置可能な車体フレーム1と、車体フレーム1に設けられる駆動輪11と、作業者によって押圧操作され車体フレーム1に駆動力を入力可能な操作ハンドル5と、操作ハンドル5が押圧操作されることによって車体フレーム1に作用する駆動トルクを検出するトルクセンサ6と、トルクセンサ6によって検出された駆動トルクに応じたアシスト力を駆動輪11に付与する電動モータ15と、駆動輪11に付与されるアシスト力を演算し当該アシスト力に応じた電流を電動モータ15に供給するコントローラ30とを備え、コントローラ30は、電源が入れられたときにトルクセンサ6が所定の駆動トルクを検出した場合には、電動モータ15への電流の供給を停止する。
(もっと読む)
折畳み式台車
【課題】 荷物を載せて運ぶことが出来と共に、収納時には折畳み、持ち運びも便利な折畳み式台車の提供。
【解決手段】 台車は荷台1と手押しハンドル2から成り、荷台1は中央板6とその両側に垂直下方に折り畳み可能に連結した側板7a,7bを有し、そして両側板7a,7bには台車が移動する為の車輪3,3・・・を取付け、中央板6と側板7a,bの間に収納溝8a,8bを形成して上記手押しハンドル2を倒した場合に支柱5,5を収めることが出来、しかも収納溝8a,8bに収まった状態で外れないようにロックするロック手段を備えている。
(もっと読む)
搬送台車
【課題】搬送台車における昇降装置の信頼性を向上する。
【解決手段】搭載された荷物を搬送可能な搬送台車100であって、駆動輪11及び自在輪12によって支持される車体フレーム1と、車体フレーム1に対して昇降可能に設けられて荷物が載置される荷台3と、電動で伸縮駆動されて荷台3を昇降させる電動昇降シリンダ2aと、電動昇降シリンダ2aに電流を供給するコントローラ30とを備え、コントローラ30は、電動昇降シリンダ2aの連続駆動時間が所定の時間以上となった場合には、電動昇降シリンダ2aへの電流の供給を停止する。
(もっと読む)
電動アシスト台車
【課題】電動アシスト台車の信頼性を向上する。
【解決手段】荷物を載置可能な車体フレーム1と、車体フレーム1に設けられる駆動輪11と、作業者によって押圧操作され車体フレーム1に駆動力を入力可能な操作部5と、操作部5が押圧操作されることによって車体フレーム1に作用する駆動トルクを検出するトルクセンサ6と、トルクセンサ6によって検出された駆動トルクに応じて駆動輪11に付与するアシスト力を演算するコントローラ30と、コントローラ30によって演算されたアシスト力を駆動輪11に付与する電動モータ15とを備え、コントローラ30は、電動モータ15に、第一設定値以上の大きさの電流が第一設定時間だけ連続して流れたことを判定する電流判定部31と、電流判定部31の判定に基づいて電動モータ15に供給可能な電流の最大値を前記第一設定値と比較して小さくする電流制御部32とを備える。
(もっと読む)
電動式ハンディカート
【課題】前方の障害物を自動で回避することができる電動式ハンディカートを提供するものである。
【解決手段】電動式カート1は障害物の画像を検出する画像検出装置40と、制御装置10を備える。制御装置10は、画像検出装置40からの画像信号に基づき障害物の輪郭を複数の点位置信号に変換する障害物画像検出手段(13,14)と、点位置信号を中心位置とする所定の径の膨張円信号を形成する障害物画像膨張手段15と、膨張円信号に基づきいずれか一つの膨張円のみに接するとともに正面方向線に最も近接した経路接線を演算し、経路接線と正面方向線との角度である経路角信号を演算する経路取得手段16と、経路角信号に基づき回避信号を出力する回避信号出力手段18と、回避信号により目標電流信号を加減して調整し、調整電流信号を出力する調整手段(21,22)と備え、調整電流信号に対応し、電動モータ(4,5)に制御電流をそれぞれ供給する。
(もっと読む)
電動アシスト台車
【課題】作業者が重量物を荷台へ載置したり、そこからピックアップしたりする際に受ける負担が少なく、作業者が当該作業に際して腰を傷めたりする危険が軽減され、また、台車の長さが押さえられて小回りが利く電動アシスト台車を提供することを課題とする。
【解決手段】台車フレーム2と、台車フレーム2の後面側に設置される操作ハンドル11と、台車フレーム2の下面に複数配備される自在輪15と、台車フレーム2の下面中央部に自在輪15と同時接地するように配備される駆動輪16と、台車フレーム2の内側に組み込まれて駆動輪16を回転駆動する駆動手段18及び駆動制御手段10とで構成され、台車フレーム2はパイプ材を箱形状に組み立てて構成されて、少なくとも自在輪15が取り付けられる下面枠3と、荷台を構成する上面枠4とを含む。
(もっと読む)
ショッピングカート
【課題】何らかの疾患を有した歩行が不自由な人がショッピングセンター等で買い物に使用しても安全で、使い勝手のよいショッピングカートを提供する。
【解決手段】進行方向側に配置される前輪12と前輪12の反対側に配置される後輪13とをそれぞれ一対ずつ有する台車11と、台車11に固定された少なくとも1本の支柱15と、支柱15に取り付けられた買い物カゴ25を載置させるカゴ置き台19及び使用者が操作するハンドル部20とを備えたショッピングカート10において、ハンドル部20は、支柱15の上端部から後輪13側に屈曲されて形成されたハンドルフレーム21を有し、ハンドルフレーム21には、使用者の肘又は前腕を支持するための前腕支持台22と、前輪12が設けられた方向に突出した把持部23とが設けられ、台車11の両側面には少なくとも後輪13外側の側面を覆うように形成された巻き込み抑制機構14が設けられている。
(もっと読む)
移動台車の昇降台
【課題】電動モータによって伸縮シリンダを伸長させてクロスリンクを開拡し昇降台を上昇させる形態にあっては、昇降台の下降位置でのクロスリンクと伸縮シリンダとが略平行に近い状態に並んだ状態になるため、この昇降台の上昇起動時における伸縮シリンダの伸出方向の出力が、クロスリンクの長さ方向に沿って作用して、昇降台を上昇し難い。
【解決手段】車台1上に、基端部の回動支持部Aと先端部のスライド支持部Bを有するクロスリンク2,3を介して昇降可能の昇降台4を支持し、前記クロスリンク2の先端部側とこの下方の車台1との間に、電動モータ5によって伸縮してこれらクロスリンク2,3を拡縮する伸縮シリンダ6を設け、前記クロスリンク2,3の先端部側の昇降台4部と車台1部との間に、この昇降台4の下降位置で前記伸縮シリンダ6と略平行状態となるダンパシリンダ7を設けたことを特徴とする移動台車の昇降台の構成とする。
(もっと読む)
電動アシスト台車
【課題】電動アシスト台車の操作性を向上する。
【解決手段】作業者によって付与される駆動力にアシスト力が付与されて走行可能な電動アシスト台車100であって、荷物を載置可能な車体フレーム1と、車体フレーム1に設けられる駆動輪11と、作業者によって押圧操作され車体フレーム1に駆動力を入力可能な操作ハンドル5と、操作ハンドル5が押圧操作されることによって車体フレーム1に作用する駆動トルクを検出するトルクセンサ6と、トルクセンサ6によって検出された駆動トルクに応じたアシスト力を駆動輪11に付与する電動モータ15と、駆動輪11に付与されるアシスト力を演算し当該アシスト力に応じた電流を電動モータ15に供給するコントローラ30とを備え、コントローラ30は、駆動トルクに応じた電流の大きさの変化の特性が相違する複数のモードを有し、モードを切り換えて電動モータ15に電流を供給可能である。
(もっと読む)
段差乗り越え車輪装置付き車椅子
【課題】
本発明の課題は、従来からの通常の前輪1個のみで段差乗り越え対応を行なうことが可能な車椅子を提供することである。
【解決手段】
本発明の段差乗り越え車輪装置付き車椅子は、前輪を回転自在に保持するフレームを車椅子の固定フレームに対して回転自在に保持し、前輪保持フレームの回転昇降を可能とすることで、容易に段差に前輪が載せられるようにしたことを特徴とする。
(もっと読む)
運搬用車両
【課題】運搬用車両は、車両の後部に設置したステップにおいて、乗り心地と収納性とを両立する。
【解決手段】運搬用車両10は、車体フレーム20の端部から引き出され、積載物を乗せる積載面の面積を拡張するステップ機構90を備えている。ステップ機構90は、車体フレーム20から第1方向へスライド可能に支持された可動支持板91と、可動支持板91に重ねられた可動展開板95と、可動支持板91および可動展開板95がスライドする動作をガイドするガイド機構100とを備えている。ガイド機構100は、可動支持板91に第1方向へ引き出す力を加えることで車体フレーム20の端部から引き出されたときに、可動展開板95が第1方向と交差する第2方向に積載面を拡張するように展開する。
(もっと読む)
運搬用車両
【課題】運搬用車両10は、車両を走行操作するためのハンドル機構50の操作性に優れている。
【解決手段】運搬用車両10は、車体フレーム20の一端に立設された支持基材51と、支持基材51の上部に設けられたハンドル機構50とを備えている。ハンドル機構50は、把持部55および支持基材51を連結する連結部材54を有するハンドル本体52と、連結部材54と支持基材51との角度の違いにより、ハンドル本体52を第1操作位置と第2操作位置とにそれぞれ設定するハンドル支持機構60と、ハンドル本体52で囲まれた領域に配置された操作部57cを有する操作機構57と、第1および第2操作位置のいずれの位置でも、操作部57cがほぼ同一方向に向くように操作機構57を回動させるリンク部材66とを備えている。
(もっと読む)
運搬用車両
【課題】運搬用車両10は、荷物を載せる作業を容易にする。
【解決手段】運搬用車両10は、車体フレーム20と、車体フレーム20の端部に配置された支持枠体41と、支持枠体41を積載部22に対して起立した起立姿勢、支持枠体41を積載部22側へ傾けた第1傾倒姿勢および積載部22の反対側へ傾けた第2傾倒姿勢に設定可能である起立傾倒機構42とを備えている。起立傾倒機構42は、回動部材43とロック部材47とを備えている。回動部材43は、第1軸44aで車体フレーム20に回動可能に支持され、第2軸44bで支持枠体41を回動可能に支持する。ロック部材47は、支持枠体41を起立姿勢に設定するロック位置と、支持枠体41が第2軸44bを中心に回動することを許容することで支持枠体41を第2傾倒姿勢へ移行可能とする非ロック位置とをとる。
(もっと読む)
腰掛作業用台車
【課題】腰を掛けて、モータで車輪を駆動して移動しつつ足を楽にして効率良く手作業を行うことが可能となる腰掛作業用台車を提供する。
【解決手段】車体フレーム2に装着した前車輪軸3及び後車輪軸4と作業台1との間にモータ7及びバッテリー6を配着する。モータ7と後車輪軸4との間に回転伝達機構8を備えるとともに回転を伝達する駆動軸34にクラッチ9を装着する。車体フレーム2の前側の中央部位にステー11を突設して先端部にロッド枢支部10を設けて前方へ突出した足台支持ロッド12を上下擺動可能に枢支する。足台支持ロッド12のロッド枢支部寄り部位に足台支持ロッド12を下げたときに突き当たって水平方向で停止するストッパ13を設ける。足台支持ロッド12の先端部寄り部位に足台支持ロッド12の両側方へ突出した足台14を設け足台支持ロッド12の足台14近傍部位にモータ制御用のペダル15を設ける。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
キャスタ及び脚ベース
【課題】ロック状態で無理に移動操作を行ってしまうことを抑制することができる上に、操作部材の操作を円滑に行うことができるキャスタ及び脚ベースを提供する。
【解決手段】キャスタ本体62と、このキャスタ本体62に軸着された車輪63と、操作部材7を下位置に操作した場合に前記車輪63を前記キャスタ本体62に対してロックするとともに、前記操作部材7を上位置に操作した場合にそのロック状態を解除するように構成されたブレーキ機構64とを具備してなるキャスタ6であって、前記操作部材7が、上下方向に間隔をあけて配された上操作片73及び下操作片74を備えたものであり、前記車輪63がキャスタ本体62に対してロックされる下位置において前記下操作片74が床面に対して起立したような姿勢で近接するように構成されている。
(もっと読む)
1 - 20 / 453
[ Back to top ]