
Fターム[3D052BB01]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 車両状態(条件,作用) (599) | 走行 (101)
Fターム[3D052BB01]の下位に属するFターム
Fターム[3D052BB01]に分類される特許
1 - 20 / 46
稲麦用コンバインのスピン旋回走行変速装置
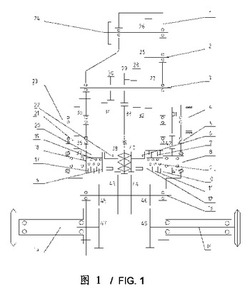
【課題】従来のコンバイン、または両側のクローラにて一方が高速、一方が定則の大径旋回でコンバインの空転行程または動力消耗が増加する、または両側のクローラにて一方が走行、一方が停止する小径旋回での、土壌を損なう問題を効果的に解決する稲麦用コンバインのスピン旋回走行変速装置を提供する。
【解決手段】稲麦用コンバインのスピン旋回走行変速装置であって、変速装置本体内の変速機構と、旋回機構と、減速機構とを備えており、旋回機構は減速機構を介してコンバインの走行を実現し、旋回機構は旋回シャフトを備えており、旋回シャフトにはセンタドライブギヤが設けられており、センタドライブギヤの左右両側には対称となる噛み合いギヤ、フォーク、ディスク、引張バネ、反転クラッチおよび反転クラッチギヤがそれぞれ設けられており、噛み合いギヤはフォークでの駆動にてセンタドライブギヤに可動的に連結されており、フォークはディスクを押動して反転クラッチを結合することで動力伝達を実現するものであり、引張バネの一端はディスクに当接しており、引張バネの他端は反転クラッチに当接しており、反転クラッチギヤは反転クラッチとの結合によって、噛み合いギヤに対する駆動を実現している。
(もっと読む)
作業車両

【課題】タイヤまたはクローラの回転状態に起因する振動を抑制する。
【解決手段】エンジン2からの回転動力を受けて駆動される無段変速装置31と、無段変速装置31によって駆動される左右一対の後輪6・6と、後輪6・6を左右独立して制動するブレーキ装置73・74と、ブレーキ装置73・74を制御可能とする制御装置9と、を具備するホイル式トラクタ100であって、作業車両本体の振動加速度を検出する振動センサ91をさらに具備し、制御装置9は、振動センサ91により取得した振動加速度が所定の値よりも大きい場合に左右一対の後輪6・6の回転位相差が小さい状態であると判断し、ブレーキ装置73・74を制御して左右いずれか一方の後輪6に制動力を加えるものとした。
(もっと読む)
作業機
【課題】 本発明は、機体の小回り旋回性を維持しながら、各種の状況に応じて適切に圃場が荒れるのを抑えることを課題とする。
【解決手段】 操向手段の操作を検出する旋回角度センサ(193)と、ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して操向内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して操向内側のサイドクラッチを常時入状態にする旋回連動機構と、耕盤の深さを検出する耕盤深さセンサ(48)を設け、耕盤が深いことを耕盤深さセンサ(48)により検出すると、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更する制御装置(163)を備えた作業機とした。
(もっと読む)
作業機械
【課題】作業機械の、燃料効率を改善する。
【解決手段】履帯式作業機械の電気パワートレーン12は、機械エネルギーを提供するよう構成されたエンジン44と、エンジン44に連結されたジェネレータ46と、ジェネレータ46に接続されて複数の駆動部材34、36にトルクを供給するように構成された少なくとも1つの電気モータ48と、少なくとも1つのパワーエレクトロニクスユニット50、60と、作業機械の減速中、少なくとも1つの電気モータ48からエネルギーを回収するように構成された電気エネルギー蓄積システム56とを備える。駆動部材34,36は、ディファレンシャルステアリングユニット68を介して、作業機械の履帯にトルクを伝達するギア減速最終駆動装置である。
(もっと読む)
作業車の操向制御装置
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、電動モータ22と、差動装置23と、後車輪21と、制御部と、を備えている。差動装置23は、エンジン2の出力と電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度を制御する。また、エンジン2の出力は略一定とされる。そして、車体の前進時において、制御部はエンジン2の駆動力を打ち消す方向にのみ電動モータ22を回転駆動することで、後車輪21への出力の変速を行う。
(もっと読む)
乗用型作業車両
【課題】乗用型作業車両において、キャスタ輪の自由走行と強制走行とを切り替え可能とし、かつ、自由操向と強制操向とを切り替え可能とする構成において、省エネルギー化を有効に図れる構成を実現することである。
【解決手段】乗用型作業車両である芝刈車両は、左右車輪、キャスタ輪、作業機である芝刈り機、キャスタ輪用の走行用モータ42,44、操舵用モータ46,48、走行系クラッチ92及び操舵系クラッチ94を備える。走行系クラッチ92は、走行用モータ42,44の駆動を停止した状態で車軸から走行用モータ42,44への回転力の伝達を遮断可能とする。操舵系クラッチ94は、操舵用モータ46,48の駆動を停止した状態で操舵軸78から操舵用モータ46,48への回転力の伝達を遮断可能とする。
(もっと読む)
コンバイン
【課題】制御性およびメンテナンス性を向上させるとともに目標走行速度にかかわらず違和感や不快感が発生しない運転操作が可能なコンバインの提供を目的とする。
【解決手段】制御手段200は、変速操作具25の操作量を検知する操作量検知手段25aと、走行用油圧式無段変速装置40の走行回転数を検知する走行回転数検知手段108と、が接続され、変速操作具25の操作量から算出される目標走行速度Vtと走行用油圧式無段変速装置40の走行回転数から算出される走行速度Vrとの速度偏差Vsを減少させるために、当該速度偏差Vsと走行制御ゲインG1とから算出される走行斜板角度補正値Vθmを目標走行速度Vtに加算して算出される速度指令値Vによって走行用油圧式無段変速装置40を制御する構成であって、走行制御ゲインG1は、目標走行速度Vtが第一設定速度V1以下では0とすることを特徴とするものである。
(もっと読む)
作業機の走行用操作装置
【課題】 走行レバーの操作領域が広くて調整領域が大きくなり、作業機を容易かつスムーズにソフトターンさせることができると共に、スピンターン、ピポットターンをゆっくりした適当な速さでなし得るようにする。
【解決手段】 走行レバーを傾動操作することにより、走行レバーの傾動方向に対応した2つのパイロット弁が選択的に操作され、走行レバーの前後左右の成分方向の操作量に対応したパイロット圧が該操作された2つのパイロット弁から油圧駆動装置に出力されて、作業機を前進又は後進しながら右旋回又は左旋回させるべく油圧駆動装置が走行モータを駆動するようにした作業機の走行用操作装置において、
走行レバーの前後左右の成分方向の操作量に対する、前進用パイロット弁及び後進用パイロット弁のパイロット圧の変化量に比べて右旋回用パイロット弁及び左旋回用パイロット弁のパイロット圧の変化量が小さくなるように設定されている。
(もっと読む)
車輪移動装置とその進行方向制御方法
【課題】スキッドステア方式およびステアリング方式以外の方法により車輪移動装置の進行方向を変更させることができ、しかも高速走行時でも安定して進行方向を変更できる車輪移動装置とその進行方向制御方法を提供する。
【解決手段】本体3と、本体3の重量を走行面1に伝達するように走行面1と接する複数の車輪5a〜5dとを備え、これら車輪5a〜5dの転動により移動する車輪移動装置において、車輪5a〜5dの回転軸の向きが本体3に対して固定された状態で、本体3の前方部の鉛直方向位置を本体3の後方部の鉛直方向位置に対して変化させるとともに、本体3の左側部の鉛直方向位置を本体3の右側部の鉛直方向位置に対して変化させることで、車輪移動装置の進行方向を左側または右側に変更する。
(もっと読む)
建設機械の走行制御装置
【課題】 左右の各走行装置用油圧ポンプの吐出流量に差があっても前後方向に直進できるようにする。
【解決手段】 左走行装置用油圧ポンプ1より吐出される圧油を左油圧モータ3の前進側と後進側へ供給する2つの圧油給排管路5と6、及び、右走行装置用油圧ポンプ2より吐出される圧油を右油圧モータ4の前進側と後進側へ供給する2つの圧油給排管路7と8を備えた建設機械の走行制御装置にて、圧油給排管路5と7を、各油圧モータ3と4を共に前進駆動する時にのみオープンとなる切換弁49を備えた接続管路48で接続する。圧油給排管路6と8を、各油圧モータ3と4を共に後進駆動する時にのみオープンとなる切換弁51を備えた接続管路50で接続する。建設機械を前進又は後進させるときには、左右の油圧モータ3と4へ供給される圧油の圧力と流量を自動的に平均化させることで、各油圧モータ3と4の駆動速度を同調させる。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバーと操向ハンドルとを直進用及び旋回用HST機構に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線P,S回りに回動可能な制御体131を備える。制御体131は、操向ハンドルの操作に伴う縦軸線P回りの正逆回動にて旋回用HST機構を作動させ、主変速レバーの操作に伴う横軸線S回りの正逆回動にて直進用HST機構を作動させるように構成する。制御体131の縦軸線P回りの回動量を旋回用HST機構の制御量に変換する旋回出力軸164の軸線AX2と、制御体131の横軸線S回りの回動量を直進用HST機構の制御量に変換する中間軸155の軸線とを実質的に同一平面上に位置させる。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバー13と操向ハンドル10とを直進用及び旋回用HST機構53,54に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線回りに回動可能な単一の制御体を収容ボックス120に内蔵する。操向ハンドル10の操作にて縦軸線回りに回動し、且つ、主変速レバー13の操作にて横軸線回りに回動するように構成する。収容ボックス120には、旋回出力軸164と中間軸155とを、互いの軸線が実質的に同一平面上に位置するようにして回動可能に軸支する。収容ボックス120は、左右の走行クローラ2の間に位置する両HST機構53,54の近傍に位置するように、操縦部9の床面を構成するステップ床部材111の下面側に配置する。
(もっと読む)
作業車輌
【課題】走行操作部材の操作量に応じて前記走行HSTの出力制御が行われる作業車輌であって、走行HSTの製造誤差及び組み付け誤差に拘わらず、走行HSTの出力調整部材における中立位置の設定を容易且つ確実に行うことができる作業車輌を提供する。
【解決手段】制御装置270は、初期設定モードにおいて中立位置設定モードを実行することにより、走行HST102を前進側及び後進側に駆動させた上で、走行HST102の出力が前進側中立位置及び後進側中立位置となるように走行アクチュエータ210を作動させ、その時点での出力調整部材108の作動位置をそれぞれ記憶し、前記前進側中立位置及び前記後進側中立位置の平均値を中立位置として記憶する。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置の変速用操作具と,前記左右の走行部に動力を逆回転伝達する旋回走行用変速装置と旋回用操作具を備えて成る走行車両において,直進及び旋回走行の操作性を向上する。
【解決手段】旋回用操作具10にて回転する旋回入力軸72に,当該旋回入力軸を中心とする円形カム84を備えた制御体81を,前記旋回入力軸の軸線と直角に延びる直交軸線Sの回りに自在に傾き回転するように設け,この制御体を前記変速用操作具13に連動して前記直交軸線Sの回りに傾き回転するように構成し,前記円形カムのうち前記直交軸線Sと直角に延びる直線W上の部分に摺動自在に係合する変速用滑り子部材97にて前記直進走行用変速装置25を変速作動する一方,前記円形カムのうち前記直交軸線S上の部分に摺動自在に係合する旋回用滑り子部材106にて前記旋回走行用変速装置を変速作動する。
(もっと読む)
作業車両のトランスミッション
【課題】従来の作業車両のトランスミッションでは、左右の走行駆動軸の各遊星歯車装置に二つの無段変速装置から動力を入力し、両走行駆動軸間に回転速度差を付与して旋回させるため、馬力ロスが大きく、特に、旋回駆動用の第二無段変速装置が中立状態等の場合、インターナルギアがフリー状態で滑らかな旋回が難しい、という問題があった。
【解決手段】走行系ドライブトレーン45と旋回系ドライブトレーン46に分岐動力を入力可能な単一の無段変速装置30を設け、前者に副変速装置29を介設し、後者にインターナルギア78・79への動力の断接を行う左右のサイドクラッチ87L・87Rと、サイドクラッチ87L・87Rの出力部材63・64を制動・解除するブレーキ88L・88Rを設け、直進と旋回の走行切替時に、旋回側のサイドクラッチとブレーキの一方の接合作動と他方の離間作動が時間的にオーバーラップする旋回制御構成とした。
(もっと読む)
走行車両
【課題】エンジンの動力を、直進用及び旋回用HST式無段変速機構25,28並びに差動機構を介して左右の走行クローラに伝達するように構成する一方、主変速レバー73と回動操作式の操向ハンドル10とを備えている走行車両において、走行機体1が前後進のいずれの状態であっても、操向ハンドル10の回動操作方向と走行機体1の旋回方向とを一致させるようにする。
【解決手段】操向ハンドル10から旋回用HST式無段変速機構28への操作力伝達経路に、主変速レバー73の操作状態に応じて、操向ハンドル10からの操作力を正逆回転及び中立の3段階に切換可能な操作力切換機構100を配置する。
(もっと読む)
動力車
【課題】操作者の操縦操作に応じて推進及び操舵を行うものにおける障害物との衝突を停止することなく回避する。
【解決手段】人が操作指示を行うための操作入力部4と該操作入力部に加えられた操作指示を検出する指示検出部Cと、加えられた指示に応じて操舵や推進のための動力を制御する制御手段CPUと、障害物を検出する障害物検知センサー5とを備える。また、障害物検知センサーによる障害物の検知出力に基づいて旋回動作中に車両に対して横移動の力を付加する衝突回避手段を備えている。停止することなく障害物を回避することができる。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、作業地に対する車輪のスリップ率を検出するスリップ率検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、スリップ率検出手段で検出された車輪のスリップ率とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
1 - 20 / 46
[ Back to top ]