
Fターム[3D114AA06]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 目的、効果 (1,242) | 生産効率の向上 (560) | 搬送効率の向上 (100)
Fターム[3D114AA06]に分類される特許
61 - 80 / 100
搬送作業方法及びその装置
【課題】ワークを搬送しつつワークに対して所定の作業を行うとき、ワークに対して通常と異なる他の作業を行う場合であっても、通常の作業を行う場合と同様の高い生産効率を得ることができる搬送作業方法及びその装置を提供する。
【解決手段】ワーク搬送手段2によりワーク1を搬送し、ワーク搬送手段2に同期して移動する可動台4に設けられたワーク支持手段23により、ワーク搬送手段2のワーク保持部7からワーク1を離脱させて支持する。通常は、ワーク支持手段23に支持されたワーク1に対して作業手段3により所定の作業を行う。作業手段3によりワーク1に対して通常と異なる他の所定の作業を行うとき、ワーク支持手段23と作業手段3との相関位置を維持した状態で、ワーク支持手段23を他の位置に待避させる。
(もっと読む)
組立ライン制御システム

【課題】組立ライン制御システム、特に自動車組立ラインの保管・ロット制御システムを提供する。
【解決手段】組立ライン制御システム、より具体的には、車両組立ラインの保管・ロット制御システムが開示されている。製造組立ラインに通信ネットワークが重ねられる。この組立ラインは、いくつかのリーダと処理ステーション104を組込んで、リーダと処理ステーションのすぐ近くを通過する車両のID、および車両のビルド・インストラクション、ステータス、位置、条件、欠陥と修理の履歴などを決定し、確認する。この情報は、コンピュータデータベースに格納される。これらの車両、在庫ステータス、生産スケジュールなどに関して格納された情報に基づいて、製造プロセスを通る車両のルーティングが決定され、実施される。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】ワークの種類が増えた場合でも作業者による手作業をすることなくワークの移し替え作業を容易に行うことができ、且つサイクルタイムを最小に抑えることのできるワーク移し替え装置を提供する。
【解決手段】第1エリアA1に第1のパレット4A〜4Dと第1ハンドリングロボット1を配置し、第2エリアA2に第1のパレット4E〜4Hと第2ハンドリングロボット2を配置すると共に、これら第1エリアA1と第2エリアA2の間に第2のパレット5Bを配置する。そして、何れかのロボット1が第2のパレット5Bにワーク3A〜3Hを移し替える際に、そのロボット1に向けて第2のパレット5Bを回転させるようにする。一方のロボット1による第2のパレット5Bへの移し替えが終了したら、他方のロボット2に向けて第2のパレット5Bを回転させる。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】作業者による手作業をすることなくワークの移し替え作業を自動化すると共に作業エリアを省スペース化することのできるワーク移し替え方法を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレット4A〜4Hからハンドリングロボット1にて所定のワーク3A〜3Hを取り出した後、組み立て生産順番となるように第2のパレット5A〜5Cに移し替えて順次配列させる作業を繰り返し行うワーク移し替え方法において、2以上の第1のパレット4A〜4Hを配置させた回転テーブル2A〜2Dを、ハンドリングロボット1がアクセスし得るエリアの周囲に複数配置し、その回転テーブル2A〜2Dを回転させて取り出すべき所定のワーク3A〜3Hが配置された第1のパレット4A〜4Hを、ロボット側に向けて配置させた後に、前記ワーク取り出し手段11で所定のワーク3を取り出す。
(もっと読む)
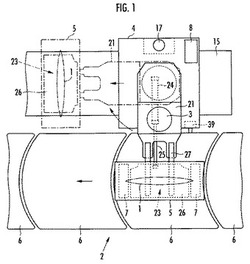
搬送装置
【課題】例えば自動車用ドアパネルの塗装工程に用いるシャトル式の搬送装置において、駆動部としてラック・ピニオン機構を用いた場合、従来ラックに対するピニオンギヤの良好な噛み合い状態を維持するためラックの背面側に規制ローラを配置していたが、搬送台車の搬送幅方向の動作ブレ等によりピニオンギヤや規制ローラに無理な力が繰り返し付加されて損傷しやすい問題があった。本発明では駆動部の耐久性を高めることを目的とする。
【解決手段】直動機構24,24で搬送方向移動可能に設けた駆動体21にラック25を取り付ける一方、搬送台車11側に駆動伝達部14,15を設け、両駆動伝達部14,15間に駆動体21を位置させて、搬送台車11の動作ブレによる無理な外力がラック25側に伝わらないようにする。
(もっと読む)
ワーク把持装置
【課題】ロボットに連結されるフレームと、そのフレームに支持された第1乃至第3のクランプ装置を有し、第1乃至第3のクランプ装置のクランプをワークに係合させて、該ワークを把持するワーク把持装置において、1台のワーク把持装置によって各種形態のワークを把持して運搬できるようにする。
【解決手段】第2のクランプ装置9Aを第1のクランプ装置9に対して接近又は離隔する方向に移動可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのピンクランプ14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】ワークの種類が増えた場合でも作業者による手作業をすることなくワークの移し替え作業を容易に行うことのできるワーク移し替えシステムを提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレット4A〜4Hから第1,第2ハンドリングロボット1,2にて所定のワーク3A〜3Hを取り出した後、組み立て生産順番となるように第2のパレット5A〜5Cに移し替えて順次配列させる作業を繰り返し行うワーク移し替えシステム。ワークの種類が増えた場合、第3ハンドリングロボット22と、この第3ハンドリングロボット22がアクセスする複数台の第1のパレット4I〜4Lと、ロボット2,22間に配置されるワーク仮置き台6Bをパッケージ23として追加する。ワーク3の種類がさらに増えた場合は、パッケージ23をさらに追加することで対応する。
(もっと読む)
ワーク搬送装置
【課題】スラットコンベアによりワークを支持させた台車の間隔を任意に調整できるようになし、ワークのピッチ間隔だけでなく、ワークの種類等に応じて、最適な位置で最適な台数の台車により支持させる。
【解決手段】ワーク1は2台の台車30により安定的に支持するようになし、台車30を牽引するスラットコンベア10の各スラット板11には台車30に装着した連結ピン36が挿入される係合孔15が形成されており、搬入ステージ3から台車30を作業ライン4に送り込んで、車輪34をレール20の転動面20a上に位置させ、連結ピン35を台板31の左右に設けたピン挿通孔35に差し込むことによって、台車30がスラットコンベア10により駆動される状態となり、連結ピン36をどのスラット板11の係合孔15に挿入するかを適宜設定することにより、前後の台車30,30の間隔が調整される。
(もっと読む)
ワーク搬送装置
【課題】搬送経路に沿って移動する台車を用いたワークの搬送装置において、台車の搬出ステージから搬入ステージへの帰還路の構成を簡単かつコンパクトなものとする。
【解決手段】2台の台車30にワークをセットした状態で、スラットコンベア10に牽引されて、作業ラインの搬送終端位置でワーク1が取り出された後、搬出ステージに移行した台車30を搬入ステージに帰還させるために、作業ラインの直下位置には、帰還路41を設けた地下ピット40形成され、搬出ステージの位置では1台の台車30が載置される支持台が配置され、この支持台は90度往復回転する回転テーブルに装着され、この回転テーブルはリフタにより台車30を載置した支持台は作業エリア2の床面2aの高さと概略一致する高さの上昇位置と、台車30の帰還路となる高さ位置との間を昇降動作される。
(もっと読む)
サスペンションアッセンブリ搬送装置
【課題】車両本体に対し、少ないパレットでサスペンションアッセンブリを円滑に供給する。
【解決手段】サスペンションアッセンブリ搬送装置10は、サスペンションアッセンブリ16を搭載自在な2枚のパレット20a、20bと、車両本体12にサスペンションアッセンブリ16を装着する際、車両本体12を位置決め固定するステーション22と、該ステーション22に固定された車両本体12に対してサスペンションアッセンブリ16を装着する際、パレット20a、20bを搬入、位置決めする装着機構24と、装着機構24に隣接し、車幅方向に延在し、パレット20を移動自在な搬送機構26と、該搬送機構26と装着機構24との間でパレット20の受け渡しをする移載機構28aとを備える。搬送機構26は主搬送部76と、該主搬送部76に設けられ、同一方向にパレット20a、20bを移動する副搬送部100とを有する。
(もっと読む)
ワーク搬送装置及びワーク搬送装置におけるワーク把持方法
【課題】適正な力でワークをクランプすることができるワーク搬送装置を提供する。
【解決手段】図(a)において、作業者は第1レバー47を図反時計方向に回す。ドライバ部材46が反時計方向に回されたため、下部ローラ45は上昇する。この結果、(b)に示す下部ローラ45は第4カム溝39から離れる。歯部はラックに完全に噛み合った状態を維持する。このため、想像線で示す第2スライダ27は左右に移動する心配はない。(a)で、位置決めされた第2スライダ27を支点にして、上部ローラ44でカムプレート33を図左へ強制移動させる。
【効果】後部把持部材を確実にドアに押し付けることができる。挟持したドアに、揺れや加減速に起因する水平力が作用したとしても、後部把持部材がずれる心配がないため、ドアを確実に且つ安定して搬送することができる。
(もっと読む)
ワーク搬送設備
【課題】簡素な構成をなすことにより小型化及び省スペース化を図ると共にワークの移載動作を容易に行うことができるワーク搬送設備を提供する。
【解決手段】フロントサスペンションFSを搭載可能な台車6を搬送するチェーンコンベア5と、第1トロリー46を搬送方向に押圧するフロントプッシャー21と、フロントプッシャー21の搬送方向上流側で第2トロリー47を押圧するリヤプッシャー22と、チェーンコンベア5により搬送された台車6を昇降装置9に移載するシリンダーとを備え、チェーンコンベア5の搬送方向下流端において受圧部からフロントプッシャー21を離脱させると共に、リヤプッシャー22を受圧部に押圧させて搬送し、昇降装置9に侵入した受圧部に係合部を押圧させて移載するようにした。
(もっと読む)
搬送台車
【課題】本発明は、ボデーの載せ替え無しに、自動車のボデーの搬送高さを組立ラインにより昇降できる搬送台車を提供することを目的とする。
【解決手段】一定経路Cに沿って、床面Fより一定高さで移動し、作業者が移動している自動車のボデーYに対して作業する搬送台車本体1と、搬送台車本体1に設けられた取付孔に組み込まれて固定され、ボデーYを昇降する左右一対の昇降部3とを備え、昇降部3は、伸縮自在な3段のリフトフレームを備え、3段目(最上段)のリフトフレームが外部昇降装置により持ち上げられることにより2段目のリフトフレームが上昇し、3段目のリフトフレームが外部昇降装置により支持されながら下降されることにより2段目のリフトフレームが下降する構成とする。
(もっと読む)
ワーク移し替え方法、ワーク移し替えシステム及びワーク移し替え装置
【課題】視覚センサーなどを使用することなくガラスを機械的手段によって精度良く位置決めしてパレットから別のパレットへ移し替えることのできる低設備で且つメンテナンスも容易に行えるガラス移し替え装置を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレットから所定のガラス3を取り出した後、組み立て生産順番となるように第2のパレットに移し替えて順次配列させる作業を繰り返し行うガラス移し替え装置。この装置では、ガラス3を吸着保持する吸着保持機構部27とガラスの奥行き方向のガラス保持位置をハンドリングロボット2の基準位置に合致させる位置調整機構部28とを備えた吸着保持位置調整手段21と、手首部分とハンドフレームとの間に設けられ、吸着保持位置調整手段で保持したガラスの幅方向及び縦方向のガラス保持位置を、ハンドリングロボット2の基準位置に合致させるガラス保持位置調整手段23とを備える。
(もっと読む)
走行台車搭載ロボットの搬送台車
【課題】リニアレールをスライド走行する機構を持った走行台車に搭載されているロボットの入れ替え作業を容易に実施できるようにする。
【解決手段】走行台車搭載ロボットを搬送するための搬送台車1を、複数の車輪2に支持された底板19と、底板19から立設された少なくとも3つの高さ方向調整ジャッキ機構13と、高さ方向調整ジャッキ機構13に支持された天板18と、天板18の上面に、ロボットの走行台車のリニアレール5と同形状のリニアレール9と、を備えて、リニアレール5と9とを当接できる構成とした。
(もっと読む)
自動車のダッシュモジュール搬入装置
【課題】ダッシュ回りの各種部品が組み付けられたモジュールを、一人の作業者で、容易に車内に搬入できるようにする。
【解決手段】各種部品が組み付けられたダッシュモジュールMをドア開口部から車室内に搬入するダッシュモジュール搬入装置であって、ダッシュモジュールMを保持するハンド(11)と、車幅方向に伸延されており前記ハンドと一体となったスライドレール(45)と、このスライドレールに対し、車体上下方向を中心軸(57)として回転可能かつスライド移動可能に連結されており、前記ドア開口部9の周縁に固定される固定部(51)と、前記スライドレールのスライド移動位置に追従して、前記ダッシュモジュールMの向きを変えるように前記中心軸を回転軸として当該スライドレールを回転させる回転制御部とを有する構成とする。
(もっと読む)
ガラス位置決め供給方法及びその装置
【課題】ガラス板の位置決め作業を軽減してガラス板の搬送や供給を効率良く行うことができ、しかも、構造を簡単として飛躍的なコストの低減が可能となるガラス位置決め供給方法及びその装置を提供する。
【解決手段】大略矩形状のガラス板Wを起立状態で位置決めし且つガラス板Wを出し入れ自在に支持するガラス支持手段8を備える移動自在のガラス保持台4に、ガラス板Wを投入して保持させる。続いて、ガラス板Wを位置決め支持したガラス保持台4を、所定のガラス供給位置Bに移送手段5により移送する。次いで、移送されたガラス保持台4を、所定のガラス供給位置Bにおいて保持台固定手段6により停止させて解除自在に固定する。
(もっと読む)
パネル部品の把持装置
【課題】 パネル部品を把持する際、パネル部品の機種等が変更になっても対応でき、簡素な構成でありながら常に確実な姿勢で把持できるようにすると同時に、処理に時間がかからないようにする。
【解決手段】 パネル部品に形成される所定ピッチ間隔の共通の3ヶ所のピン孔pを把持するため、把持装置1の3ヶ所に、それぞれロック付きシリンダ5によって位置調整可能なチャック部材6を設け、ピン孔pに対する挿入方向に対して独自に位置調整可能にする。そして、取扱うパネル部品の機種等が変わった場合は、チャック部材6をピン孔pに対する挿入方向に対してフリーにしておき、機種切換え用部材10の機種に応じた3ヵ所の基準ブロック10kに、チャック部材6近傍の台座リング8の基準面8aを当接させ、この状態でチャック部材6をロックする。
(もっと読む)
組立ラインのワーク搬送装置
【課題】組付け作業を行いつつワークを搬送するような搬送装置において、組付け作業の容易化を図り、また、コンベアラインが周回経路として設けられるような場合でも、内側領域を有効に活用して生産性の向上が図られるようにする。
【解決手段】パレットの床面が作業用床面と略同一高さで走行するパレット2にワークを搭載するようなフリーフロー式のコンベアラインにおいて、ラインの一部に水平曲線部を設け、パレット2を、搬送方向に対して、第1、第2、第3分割パレット2A、2B、2Cに分割するとともに、第1、第2分割パレット2A、2Bと、第2、第3分割パレット2B、2Cとをそれぞれ縦向きの枢支ピン9で連結することにより、各分割パレット2A、2B、2Cがお互いに水平面内で回動自在になる。
(もっと読む)
ガラス保持装置
【課題】ガラス板の位置決め作業を軽減してガラス板の搬送や供給を効率良く行うことができ、しかも、構造を簡単として飛躍的なコストの低減が可能となるガラス保持装置を提供する。
【解決手段】ガラス板Wを起立状態で収容するフレーム2と、フレーム2の底枠2aに設けられて起立状態のガラス板Wをその一側縁が下方となるように傾斜させてガラス板Wの下縁を支持する第1支持手段3と、フレーム2の起立する一側枠2bに設けられてガラス板Wの一側縁を支持する第2支持手段4とを備える。第1支持手段3は高低差を有して配設されてガラス板Wの下縁に当接する複数のローラ部材5,6を備え、第2支持手段4はガラス板Wの一側縁に当接するローラ部材11を備える。各ローラ部材5,6,11はガラス板Wの端縁が挿入自在の支持溝5a,6a,11aが全周に形成されている。
(もっと読む)
61 - 80 / 100
[ Back to top ]