
Fターム[3D114GA09]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め手段 (485) | 接触によるもの (197) | センサ(リミットスイッチ等) (23)
Fターム[3D114GA09]に分類される特許
1 - 20 / 23
サスペンションアッセンブリ取り付け方法
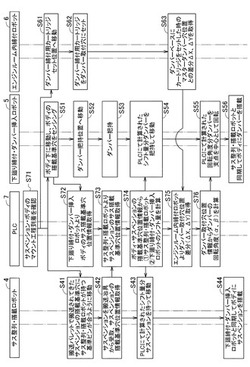
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
外部操作ハンドガイド装置とその制御方法

【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
パワーアシスト装置、自動搭載装置、およびそれらの制御方法
【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
(もっと読む)
車両搬送用ラインコンベヤおよび車両搬送方法
【課題】安価に構成することが可能な車両搬送用ラインコンベヤおよび車両搬送方法を提供する。
【解決手段】ドライブユニットによってタイヤプッシャ3を車両搬送方向へ駆動して、タイヤプッシャ3のローラ32によって車両の右前輪5aにおける転動面の後側を押圧することにより、右前輪5aを順方向へ転動させる。これにより、車両を車両組立ラインに沿って搬送することができる。そして、ドライブユニットは、無端チェーン8を減速機付きモータの駆動により規定の軌道で循環させる簡易な構造であることから、スラットコンベヤと比較して大幅に安価なラインコンベヤを提供することができる。
(もっと読む)
ワークの形状認識システムおよびそれを具備する組立ライン、並びにワークの形状認識方法
【課題】搬送途中のワークの表面に現れる形状変化を精度良く認識し、組立ライン内に設けられる組付装置と、ワークとの間の位置ズレを防止することが可能な技術を提供することを課題とする。
【解決手段】車体3の搬送経路8に沿って設けられ、車体3の基準位置Zを検出するリミットスイッチ30と、同じく車体3の搬送経路8に沿って設けられ、車体3の基準位置Zからの移動量Lを検出するロータリエンコーダ40と、同じく車体3の搬送経路8に沿って設けられ、車体3の表面(主としてルーフ面3a、並びにその他の表面)との直線距離Hを検出するレーザ変位計50と、ロータリエンコーダ40とレーザ変位計50とにより検出された二つの検出値に基づいて、搬送方向と平行な方向における車体3の表面の形状変化を認識する認識装置60と、を具備する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ワークを目標に合わせる場合は、ブレを補正して目標軌道に沿いやすくするとともに、軌道の変更・修正を行う場合は、ワークをスムーズに移動できるように制御するパワーアシスト装置およびその制御方法を提供する。
【解決手段】操作ハンドル6と、操作ハンドル6に加えられた操作力とその向きθhを検出する力センサ7と、ロボットアーム3と、アクチュエータ11と、を備えるパワーアシスト装置50の制御方法であって、操作力の向きθhが、予め定めた操作ハンドル6の進行方向に対して所定の角度範囲内であると検出された場合には、操作ハンドル6を、操作力の進行方向成分のみを採用して、進行方向Aに沿って進行させるようにアクチュエータ11を駆動し、操作力の向きθhが、前記所定の角度範囲外であると検出された場合には、操作ハンドル6を、操作ハンドル6に加えられた操作力とその向きで進行させるようにアクチュエータ11を駆動する。
(もっと読む)
車両用インストルメントパネルの取り付け装置及び方法
【課題】インストルメントパネルを車室内に迅速且つ効率的に組み込むことを可能にする。
【解決手段】取り付け装置10は、インストルメントパネル24を把持するインパネ把持手段78を設け、前記インストルメントパネル24を搬送するとともに、前記インストルメントパネル24の重量を保持するアシスト機能を有するアシスト機18と、前記インパネ把持手段78に着脱可能に連結される連結手段80を設け、前記インパネ把持手段78を操作して前記インストルメントパネル24を車室14a内に配置させる作業ロボット20、22とを備えている。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークの位置決めをする際には、作業者による判断や経験(勘やコツ)を活かしながら、位置決めの一部についてパワーアシスト装置に負担させることにより、ワークの位置決め作業に対する作業者の負担を軽減しつつ、位置決め精度の向上と作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】制御装置2aを備え、作業者の作業動作をアシストするべく前記作業者の作業動作に協調して自律的に作動するパワーアシスト装置1の制御方法において、制御装置2aには、一連の作業タスクを複数の作業区間に分割し、作業区間ごとに制御ロジックが設定されるパワーアシスト装置1の制御方法であって、パワーアシスト装置1が自由度を有する作動方向ごとに、制御ロジックが設定される。
(もっと読む)
ワーク搬送装置およびワーク設置方法
【課題】ワークの周縁部を均一な力で被設置物に押圧することが可能なワーク搬送装置およびワーク設置方法を提供する。
【解決手段】把持具20によりリアガラス5を把持し、把持したリアガラス5を支持アーム10の動作により車体7の窓枠7aまで搬送するとともに、窓枠7aに対して押圧しつつ設置するワーク搬送装置1であって、前記把持具20の各吸着パッド30は、該吸着パッド30にかかる力を検出可能な力検出センサ31を備え、ワーク搬送装置1の制御装置80は、前記窓枠7aにリアガラス5を設置する際に、前記各吸着パッド30の力検出センサ検出値31の大きさに基づいて、前記支持アーム10の動作を制御する。
(もっと読む)
ワーク取り出し装置
【課題】パレット奥の横桟とワーク押さえ手段が接触したときにワーク押さえ手段を接触方向とは反対方向に退避させて干渉を無くすワーク取り出し装置を提供する。
【解決手段】縦置きパレットに縦置きに複数配置されたガラス3をパレット手前から奥側に向かって順次取り出すワーク取り出し装置7であって、前記ガラス3の上端縁を押圧し該ガラス3をパレット底部に押し付けてガラス3のパレット奥行き方向への倒れ込みを防止するガラス押さえ手段61を有し、このガラス押さえ手段61が横桟と接触したときに、接触方向とは反対方向にガラス押さえ手段61を退避させる干渉回避手段70を備える。干渉回避手段70は、横桟に接触する接触部材71と、ガラス押さえ手段61を摺動自在とするスライドレール72及びスライダー73と、ガラス押さえ手段61を一方に押し付ける弾性部材74と、からなる。
(もっと読む)
ウィンドウガラス取付装置
【課題】コンベア上を搬送される車体の所定の取付位置に、自動でウィンドウガラスを取付けることを可能にする。
【解決手段】ウィンドウガラス取付装置10は、ウィンドウガラス300を保持するウィンドウガラス保持装置20と、ウィンドウガラス保持装置を車体200の搬送方向に移動自在に案内する縦ガイド110と、ウィンドウガラス保持装置に取付けられたアーム40で構成される。そして、コンベア100上を搬送される車体200が所定の位置となると、アーム40が車体200に当接することで、ウィンドウガラス保持装置20が縦ガイド110に案内されてコンベア100上を搬送される車体200に追従して移動する。
(もっと読む)
軟性部材取付方法及び同取付装置
【課題】コストアップを抑えるとともに軟性部材を被取付部に精度良く装着可能な軟性部材取付方法及び同取付装置を提供する。
【解決手段】ランチャンネル11に対してローラ21を、ローラ21の回転軸としてのローラ支持軸36に直交する方向に一定押付け力F1で押し付けると同時にローラ21の回転軸方向に押付け力(Fa−Fb)がゼロとなるようにローラ21を回転軸方向に移動させながら、ローラ21をサッシュ27のサッシュ溝49に沿って移動させる。
(もっと読む)
搬送装置
【課題】例えば自動車用ドアパネルの塗装工程に用いるシャトル式の搬送装置において、駆動部としてラック・ピニオン機構を用いた場合、従来ラックに対するピニオンギヤの良好な噛み合い状態を維持するためラックの背面側に規制ローラを配置していたが、搬送台車の搬送幅方向の動作ブレ等によりピニオンギヤや規制ローラに無理な力が繰り返し付加されて損傷しやすい問題があった。本発明では駆動部の耐久性を高めることを目的とする。
【解決手段】直動機構24,24で搬送方向移動可能に設けた駆動体21にラック25を取り付ける一方、搬送台車11側に駆動伝達部14,15を設け、両駆動伝達部14,15間に駆動体21を位置させて、搬送台車11の動作ブレによる無理な外力がラック25側に伝わらないようにする。
(もっと読む)
部品搬送・取付け方法及びその装置
【課題】 部品組付け対象物に対して、部品を支持するワーク支持手段の位置が制約を受けないようにし、また、部品を取付ける際に、部品を位置決めするための別の格別な手段を設けなくても済むようにする。
【解決手段】 サイドカーテンエアバッグSを保持するセット治具2に位置決め機構5を設け、この位置決め機構5として、位置決めピン7と係合部材10から構成し、係合部材10とセット治具2側をワイヤ8で連結する。そして、係合部材10を車体Bに取付けた後、ワイヤ8の引出し長さをワイヤ巻取り装置11で検知するとともに、ワイヤ8にかかるテンションの3軸方向の分力を力覚センサ9で検知するようにし、ワイヤの引出し角度を求める。そして、ワイヤ8の引出し長さと引出し角度から、係合部材10と位置決めピン7の位置ずれ量を求めるようにし、この位置ずれ量をゼロにするようセット治具2を移動制御し、最終的に係合部材10と位置決めピン7を連結させることにより、エアバッグS組付時の位置決め機能を持たせる。
(もっと読む)
ワークピースの可動部分の位置決め装置
【課題】ロボットとワークとの間隔が所定間隔から変化したときでもワークを適切に位置決めできる装置を提供する。
【解決手段】位置決め装置10は、第1および第2の当接部材38、40を有する当接アセンブリを含む。また、位置決め装置10は、第1の当接部材38がワークピース16の部分の外側表面に隣接して配置され、第2の当接部材が部分によって画定された外側空間に配置される位置特定位置と、第2の当接部材40が部分内に配置され、第1の当接部材が部分によって画定された外側空間に配置される挿入位置との間で当接アセンブリを移動させるアクチュエータアセンブリ48を含む。また、アクチュエータアセンブリ48は、ワークピース16の部分と第1および第2の当接部材38、40の少なくとも一方との当接によって部分を本体19と相対的に移動させる。
(もっと読む)
ワーク位置決め装置
【課題】 設備費の低減に好適なワーク位置決め装置を提供する。
【解決手段】 位置決めするワーク形状に対応して形状が相違する複数のゲージGを放射状に備え、その回転位置に応じたゲージGを使用位置に突き出させる複数のゲージユニット2、4と、前記各ゲージユニット2、4に連結された回転部材(ピニオン20)に夫々係合し、その移動により各回転部材20を介して各ゲージユニット2、4を連動して回転させて各ゲージユニット2、4の回転角度位置を連携させる連携手段(ラック21)15と、前記連携手段(ラック21)15を予め設定した複数の停止位置のいずれかに停止させ、停止位置に応じて前記各ゲージユニット2、4から使用位置に突き出させるゲージGを設定するワーク種別切換手段16と、を備えるようにした。
(もっと読む)
テープ貼付補助装置
【課題】ワークへの粘着テープの貼り忘れを防止することができると共に、粘着テープの貼付作業の作業性を向上させることができるテープ貼付補助装置を提供すること。
【解決手段】テープ貼付補助装置は、ワーククランプ、テープ材マガジン、テープ材フィーダ、重力バランサ及び制御手段等を有している。制御手段は、ワーク検出スイッチからのスイッチ入力を受けたときには、突出ステップとして、テープ材フィーダを移動させることにより、テープ材をテープ材マガジンから突出させ、ロックステップとして、ワーククランプを移動させることにより、載置台からのワークの取出を不能にする。その後、制御手段は、アンロックステップとして、テープ材取出検出スイッチからのスイッチ入力を受けて、ワーククランプを移動させることにより、載置台からのワークの取出を可能にする。
(もっと読む)
パネルワークの移載装置及び移載方法
【課題】 コストアップさせることなくパネルワークの持ち帰りを防止するに好適なパネルワークの移載装置及び移載方法を提供する。
【解決手段】 ハンドリングロボット1によりパネルワークWを位置決めしつつ移載するパネルワークの移載装置であり、移載先装置2にパネルワークWの穴若しくは縁にパネル面方向から係合する係合手段27を設け、前記ハンドリングロボット1は、パネルワークWを移載先装置2上でパネル面方向に移動させることにより前記係合手段27とパネルワークWの穴若しくは縁とを係合させた後、パネルワークWの把持を解除して離脱するようにした。
(もっと読む)
1 - 20 / 23
[ Back to top ]