
Fターム[3D232FF02]の内容
走行状態に応じる操向制御 (73,124) | 他の制御システムとの関連 (1,978) | 変速機の制御 (115)
Fターム[3D232FF02]に分類される特許
1 - 20 / 115
操舵機構の制御装置
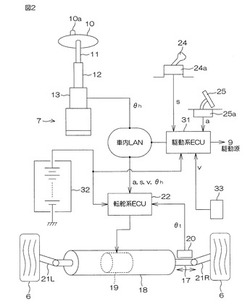
【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
車線逸脱防止制御装置

【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
車両の制御装置
【課題】加減速度のある旋回に拡張したスタビリティファクタを適正化することのできる制御装置を提供することを目的とする。
【解決手段】車両が実際に旋回走行した際の互いに異なる値の三つの前後加速度を求め(ステップS2,S7,S9)、それらの前後加速度が求められた各走行時の実スタビリティファクタを求め(ステップS4)、加減速度のある旋回時に拡張したスタビリティファクタの関係式に前記前後加速度と前記実スタビリティファクタを代入して三元連立一次方程式を立てて前記係数および他の係数ならびに定数項の定数についてそれぞれの値を求め(ステップS10)、その求められた前記係数および他の係数ならびに定数項の定数を前記関係式に代入して、加減速度のある旋回に拡張したスタビリティファクタの定義式を更新する(ステップS11)。
(もっと読む)
走行制御装置
【課題】車両を目標位置まで自律走行させる場合に、車両が目標位置へ到着する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、車両1の走行中に、前回の補正が行われた時に設定された直線距離daと、現在の車両1の車両位置から目標とする駐車位置Oまでの直線距離dnとを比較し、直線距離dnが直線距離daよりも短くなる場合に、目標とする駐車位置Oの再認識を試みる。これにより、車両1が目標位置Oに近づく度に、目標とする駐車位置Oを再認識できるので、再認識された駐車位置O’に含まれる誤差を徐々に(段階的に)低下させることができる。よって、目標とする駐車位置Oの特定精度を徐々に(段階的に)向上させることができるので、車両1が目標とする駐車位置Oに到着する可能性を向上させることができる。
(もっと読む)
車両制御装置
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
車両の制御装置
【課題】シフトバイワイヤ機構によるパーキングレンジへの切替操作時における違和感の発生を抑制する車両の制御装置を提供する。
【解決手段】シフトバイワイヤ機構により非パーキングレンジからパーキングレンジへの切替操作が実行される際には、車両に前後方向の制動力を付与するようにステアバイワイヤ機構により車輪の方向を変化させる据え切り制御を実行するものであることから、Pスイッチ30等のシフト操作装置による操作から実際に切替が行われるまでのタイムラグにおける車両の前後方向の挙動を好適に抑制することができる。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
駐車支援システム
【課題】日常的に使用する駐車場について、駐車枠の設定の手間を軽減することが可能な駐車支援システムを提供すること。
【解決手段】目標とする駐車領域のコーナー部に駐車支援シート40を配置する。この駐車支援シート40には、駐車領域のコーナー点及びそのコーナーから延びる2本の直交する駐車枠線の位置を定めるための模様が描かれている。CCDカメラ10によって撮影したカメラ画像を、画像処理ECU20において画像処理することにより、カメラ画像内で駐車支援シート40が検出できたとき、コーナー位置を示す仮想コーナーポール、仮想駐車枠線、及び仮想駐車枠線と自車両との最短距離などを重畳表示した車両周辺画像を表示する。
(もっと読む)
自動運転装置
【課題】 自車両の自動運転を行うにあたり、自車両の周囲における交通環境に応じた走行制御を行うことにより、自車両の周囲における交通環境の妨げを防止することができる自動運転装置を提供する。
【解決手段】 自動運転装置における自動制御ECU1は、走行中の道路に対して道なりに走行させる自動運転制御を行うにあたり、自車両が走行する車線の状態を検出し、検出した車線の状態に基づいて、自動運転制御を行う。たとえば、自車両が走行する道路に自車走行車線が道なり走行可能である道なり車線があるにも係わらず、自車両が道なり車線でない車線を走行している場合には、自車両を道なり車線に移動させる進路を生成する。また、自車両が走行する道路に道なり車線が複数ある場合には、道なり走行に好適となる道なり車線に自車両を移動させる進路を生成する。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
車両走行支援装置
【課題】車両特性の変化を直接的に解析することなく、車両移動量の推定精度の向上を図る。
【解決手段】経路演算部12は、車輪速センサ21によって検出された車輪速に基づいて車両の走行軌跡の曲率ρvを算出するとともに、舵角センサ28によって検出された前輪の転舵角δとに基づいて曲率ρstを算出する。また、経路演算部12は、算出した各曲率ρv,ρstの信頼度をそれぞれ評価し、この評価結果に基づいて微小時間の曲率を決定する。そして、経路演算部12は、決定された所定区間の移動量に基づいて自車両の自己位置を推定する。
(もっと読む)
車両制御装置
【課題】運転者に与える違和感を抑制しつつ、目標値に実際の項目を近づけられる車両制御装置を提供すること。
【解決手段】走行環境あるいは走行条件の少なくとも一方に基づいて運転者に加わる加速度が変化する車両運動に係る項目(加速度)の目標値101を設定する目標値設定手段と、運転者の要求値102を設定する要求値設定手段と、対数値で比較したときの要求値との差が第一の範囲内となる項目の範囲である所定範囲A、および、対数値の変化速度で比較したときの要求値との差が第二の範囲内となる項目の変化速度の範囲である所定変化速度範囲をそれぞれ設定する範囲設定手段と、所定範囲内で項目を目標値に近づけ、かつ、項目の変化速度が所定変化速度範囲内となるように項目の指令値105を設定する指令値設定手段と、指令値に基づいて車両を制御する制御手段とを備え、第二の範囲は、要求値の変化速度に応じて可変に設定される。
(もっと読む)
車両の駐車支援システム
【課題】演算負荷を低減し、コスト増を回避しつつ、1回の切り返しのみならず、複数の切り返しで駐車スペースに車両を自動的に駐車させることができる駐車支援の手法を提供する。
【解決手段】自動操舵によって駐車させるシステムは、駐車スペースの幅および該駐車スペースに面している道路の幅を検出する。1回の切り返しにより駐車スペースに駐車させる駐車経路および複数の切り返しにより駐車スペースに駐車させる駐車経路が、駐車スペースの幅および該駐車スペースに面した道路の幅に従って予め定義された駐車経路テーブル41が設けられる。検出された駐車スペースおよび道路の幅に基づいて、駐車経路の候補を駐車経路テーブル41から読み出す。駐車のために前記車両が停車したときに特定された車両の位置に基づいて、該読み出した駐車経路の候補のうちの1つを選択する。該選択した駐車経路に従って車両を誘導するよう、該車両のステアリングを駆動する。
(もっと読む)
車両制御装置
【課題】ドライバーに制御の遅延による違和感を与えず、又、路面摩擦係数が低下した場合に於いても減速力過多により車両が不安定に陥ることがなく、従来の装置よりも高性能でかつ設計時に於いてもマッチングが容易な車両制御装置を提供する。
【解決手段】
ドライバーの旋回動作により前輪に発生するセルフアライニングトルクを検出し、このセルフアライニングと車速から演算した推定舵角を基に変速比制御を行うことで、ドライバーに制御遅延による違和感を与えず、路面摩擦係数が低下した場合に於いても減速力過多により車両が不安定に陥ることがなく、従来の装置に比して高性能でかつ設計時に於いてもマッチングが容易となるようにした。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が実際の摩擦係数から乖離する方向に更新してしまうような状況が発生するのを防止し、該摩擦係数の推定を精度よく安定に行う。
【解決手段】比較対象外力の第1推定値Mnsp_estmを求める手段(S118−2)と、第2推定値Mnsp_sensを求める手段(S118−1)と、第1推定値Mnsp_estm及び第2推定値Mnsp_sensを基に摩擦係数推定値の増減操作量Δμ_kをそれぞれ決定する複数の増減操作量決定手段とを有し、Δμ_kに応じて摩擦係数推定値を更新する。増減操作量決定手段は第1推定値と第2推定値とのフィルタリング値の偏差に応じてΔμ_1,Δμ_2を決定し、増減操作量決定手段は第1推定値と第2推定値との偏差に応じてΔμ_1を決定する。
(もっと読む)
1 - 20 / 115
[ Back to top ]