
Fターム[3D232FF08]の内容
走行状態に応じる操向制御 (73,124) | 他の制御システムとの関連 (1,978) | トラクションコントロール (154)
Fターム[3D232FF08]に分類される特許
1 - 20 / 154
インホイールモータを利用した車両制御方法
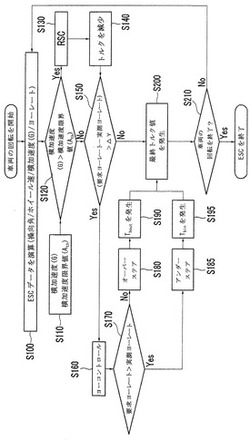
【課題】車体の安定性を確保するために、ESCシステムではなくインホイールシステムを利用することにより、車両を安定的に制御することができるインホイールモータを利用した車両制御方法を提供する。
【解決手段】操向角、ホイール速度、横加速度、ヨーレートを演算する段階、横加速度と予め設定された横加速度限界値を比較する段階、操向角、ホイール速度に基づいた運転手が要求する要求ヨーレートと車両の実測ヨーレートの差を予め設定されたヨーレートコントロール基準値と比較する段階、要求ヨーレートと実測ヨーレートの差がヨーレートコントロール基準値よりも大きい場合には、要求ヨーレートと実測ヨーレートを比較する段階、要求ヨーレートと実測ヨーレートの差によって最終トルク値を発生させる段階を含むことを特徴とする。
(もっと読む)
電動パワーステアリング装置

【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、ヨーレートセンサを含む複数の変量検出部の検出値の絶対値が所定の範囲内にあり、かつ、ヨーレートセンサの検出値の今回値の絶対値が前回値の絶対値より小さいということを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力の左右差が発生している際における操向車輪のセルフアライニングトルクの変化を打ち消し得る車両の操舵力制御装置の提供。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力(Bq[f*])が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段(TQ)が備えられる。制動制御によって操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)に基づいて、操舵力発生手段(TQ)により操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)が大きいほど、より大きい値に調整される。
(もっと読む)
移動農機
【課題】圃場での作業に合わせて容易にステアリング可能な移動農機を提供する。
【解決手段】ステアリングハンドルの操舵範囲を複数の領域に分割して形成し、主に機体を旋回させる際に使用される旋回領域Bでは、ステアリングハンドルの操舵量に対する前輪の操向量の比率を、この旋回領域よりも操舵角の小さな領域である方向修正領域よりも大きく設定する。これにより、作業者は直進時には、ステアリングハンドルを方向修正用域で操舵して機体の方向を微調整すると共に、旋回時には、ステアリングハンドルを旋回領域まで操舵して、少しの操舵で機体を旋回させる。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力が付与される際における操向車輪のセルフアライニングトルクの不足を補償し得る車両の操舵力制御装置を提供する。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力Bq[f*]が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段TQが備えられる。操舵角Saaと、制動制御によって操向車輪に付与される制動力Bq[f*]とに基づいて、操舵力発生手段TQにより操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力Bq[f*]が大きいほど、また、操舵角Saaが大きいほど、より大きい値に調整される。
(もっと読む)
車両用制御装置
【課題】横加速度の向きとヨーレートの向きを利用して車両の前進または後退を精度良く判定する。
【解決手段】車両用制御装置は、横加速度ayとヨーレートωとに基づいて車両の前進・後退を判定する進行方向判定手段24と、横加速度ayと基準値との偏差である横加速度変動量Δayを算出する変動量算出手段23と、転舵速度算出手段22とを備える。進行方向判定手段24は、ステアリングを左に操舵するときの転舵速度Δθの符号と、安定して左旋回しているときに作用する横加速度ayの符号を正と規定し、ステアリングを右に操舵するときの転舵速度Δθの符号と、安定して右旋回しているときに作用する横加速度ayの符号を負と規定したとき、横加速度変動量Δayの絶対値が第1の所定値以上であり、かつ、横加速度変動量Δayおよび転舵速度Δθのうち、一方が正であり、他方が負であるとき、車両が前進しているという判定を行わないように構成される。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
車両の操舵時挙動改善装置
【課題】操舵時におけるヨーイング挙動の線形性およびロールの抑制を、サスペンション装置の変更なしに実現する。
【解決手段】モータ駆動トルクを操舵開始時t1から所定時間TM1sが経過するt2までの間、目標モータトルクよりも実線波形で示す量だけ増大された値に補正し、t2から所定時間TM2sが経過するt4までの間、目標モータトルクよりも実線波形で示す量だけ減少された値に制御する。t2〜t4間のモータトルク減少補正は車両のロール速度を速くする内外輪荷重変化を生じさせ、内外輪側ショックアブソーバ・ストローク速度VsaboutおよびVsabinが、モータトルク減少補正非実行時のVsabin'およびVsabout'よりも速くなる。これによりショックアブソーバの振動減衰力が大きくなり、当該期間においてロール角を小さくでき、操舵中の車体ロール感を改善することができる。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車両の軌道の決定方法
【課題】ブレーキ過程において制動距離を短縮するための方法および装置、または加速過程においてトラクションを改善するための方法および装置を提供する。
【解決手段】車両(1)の軌道(5、6、7)の決定方法において、操縦の際に、種々の走行路領域の摩擦係数情報が決定され、障害物に関して周辺検出が実行され、摩擦係数情報に基づき且つ周辺検出の結果を考慮して、少なくとも1つの軌道(5、6、7)が決定される。これにより、制動距離の短縮または改善されたトラクション(牽引)が達成可能である。
(もっと読む)
車両運動制御システム
【課題】菱形車輪配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】前輪12Fと後輪12Rとの少なくとも一方を転舵させる転舵装置を制御するための制御装置が有する制御部を、左輪14Lおよび右輪14Rのいずれか一方に目標とされる駆動力と目標とされる制動力との少なくとも一方を付与できない失陥が駆制動装置に生じた場合に、その失陥に起因して生じる車両のヨーイング(ヨーモ−メントMyaw)を抑制すべく、転舵輪12F,12Rとのうちの1以上のものの転舵量を制御するように構成する。それにより、失陥に起因して生じる車両のヨーイングと逆向きのヨーモーメントを発生させ、その失陥に起因するヨーイングを低減させることが可能とされている。つまり、本車両運動制御システムによれば、上記のような駆制動装置の失陥時においても、車両の直進性を確保することが可能である。
(もっと読む)
車両運動制御装置及び車両運動制御プログラム
【課題】簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を導出する。
【解決手段】記憶された自車両と目標位置との間の距離のx成分Xeとy成分Yeとの比で定めた第1のパラメータ、自車両の速度のx成分vx0とy成分vy0との比で定めた第2のパラメータ、及び目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を求めるために導入した第1の導入パラメータν1の関係を定めた第1のマップ、第1のパラメータ、第2のパラメータ、及び第2の導入パラメータν2の関係を定めた第2のマップ、並びに第1のパラメータ、第2のパラメータ、及び目標位置に到達する時刻teの関係を定めた第3のマップと、現在の自車両と目標位置との間の距離及び自車両の速度に基づいて演算された第1のパラメータ、第2のパラメータとを用いて車体合成力を導出する。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
路面情報取得装置
【課題】 取得した路面情報を多様な状況において有効に利用することができる路面情報取得装置を提供する。
【解決手段】 走行制御ECU1は、車両の走行位置を取得する走行位置取得部12および摩擦係数を算出する摩擦係数算出部13を備える。さらに、取得した摩擦係数を含む路面情報を走行位置に関連付けて記録する路面情報記録部14を備える。さらに、車両がグリップ状態にあるか非グリップ状態にあるかを判定するグリップ状態判定部11を備える。路面情報記録部14は、車両がグリップ状態にある場合と非グリップ状態にある場合とで区別して路面情報を記録する。
(もっと読む)
車体傾動制御装置及びその方法
【課題】車体を傾動させる装置が正常でない場合に、車体の姿勢を車両の走行に適合した姿勢にする。
【解決手段】車体傾動制御装置は、車両前後方向に少なくとも2つ配置されそれぞれ、ロール方向に車体を傾動させる車体傾動装置21F,21Rと、車輪を転舵させる運転者の運転操作に応じて、各車体傾動装置21F,21Rを駆動制御する車体傾動装置駆動部25F,25Rと、各車体傾動装置21F,21Rが正常か否かを判定する車体傾動装置異常判定部31と、ロール方向の車体の姿勢を固定する車体傾動停止装置26と、を備え、車体傾動装置駆動部25F,25Rが、車体傾動装置異常判定部31が車体傾動装置21F,21Rの1つが正常でないと判定すると、車体傾動装置異常判定部31が正常と判定した車体傾動装置21F,21Rを駆動制御して、車体の姿勢をロール方向で中立姿勢にし、車体傾動停止装置26が、その中立姿勢に固定する。
(もっと読む)
1 - 20 / 154
[ Back to top ]