
Fターム[3D232GG01]の内容
走行状態に応じる操向制御 (73,124) | 車種 (3,640) | 一般車両(一般の道路を走行する車両) (3,372)
Fターム[3D232GG01]の下位に属するFターム
大型車両(バス、トラック) (31)
Fターム[3D232GG01]に分類される特許
41 - 60 / 3,341
車両用操舵装置
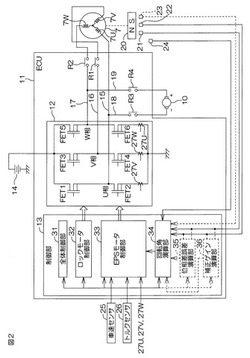
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
車線逸脱防止制御装置

【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
自動車の車体構造
【課題】車両旋廻時、車両後部が車両前部よりも旋廻外側に張り出すことを防止し、外輪差を気にすることなく運転できる自動車の車体構造を提供すること。
【解決手段】本発明の自動車の車体構造は、前輪3L,3Rの舵角θ2よりも後輪4L,4Rの舵角θ1が逆位相で相対的に大舵角とする舵角制御手段5と、右旋廻時に右側最大車体基準円11の内側に収まり、左旋廻時に左側最大車体基準円21の内側に収まる外側形状を有する車体2と、を有する。そして、右側最大車体基準円11は、右旋廻時最小回転半径の中心位置Pを中心点とし、車幅方向中心位置Oをはさんで中心位置Pと反対側の車体2上に設定する左車体基準点10を通る。また、左側最大車体基準円21は、左旋廻時最小回転半径の中心位置Qを中心点とし、車幅方向中心位置Oをはさんで中心位置Qと反対側の車体2に設定する右車体基準点20を通る。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
車両用前後輪転舵制御装置
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
操舵支援装置
【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
電動パワーステアリング装置
【課題】アシスト電流指令値を最大電流より小さく制限することにより安全性を高めると共に、簡単な構成で処理負荷的に有利であり、出力過多異常の誤判定を生じない高機能な電動パワーステアリング装置を提供する。
【解決手段】マイクロコンピュータと、プログラム等に基づいて制御演算処理するCPUと、記憶領域を形成するRAMと、モータのアシスト電流指令値を演算するアシスト電流演算手段と、各相電流指令値を生成する各相電流指令値生成手段とを具備し、各相電流指令値に基づいてモータをベクトル制御することによりアシストする電動パワーステアリング装置において、ROM及びRAMの領域を各所定診断周期で診断する異常診断機能と、各相電流指令値生成部の出力過多の異常を検出する異常判定部とを具備する。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置
【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
41 - 60 / 3,341
[ Back to top ]