
Fターム[3D233CA11]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688)
Fターム[3D233CA11]の下位に属するFターム
車両の運動状況 (4,070)
操舵の状況 (7,023)
電気系、電動機の状況 (2,185)
Fターム[3D233CA11]に分類される特許
21 - 40 / 410
摩擦状態推定装置
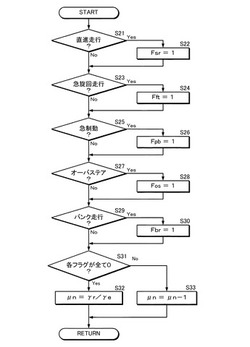
【課題】 直進走行時や急旋回走行時等における誤推定を抑制した摩擦状態推定装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS31で直進走行フラグFsr,急旋回走行フラグFft,急制動フラグFpb,オーバステアフラグFos,バンク走行フラグFbrが全て0であるか否かを判定し、この判定がYesであればステップS32で実ヨーレイトγrを標準ヨーレイトγeで除すことにより路面μの今回値μnを推定/出力する。一方、各フラグFsr,Fft,Fpb,Fos,Fbrのうち少なくとも1つが1であり、ステップS31の判定がNoとなると、ATTS−ECU16は、ステップS33で路面μの前回値μn−1を今回値μnとしてそのまま出力する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車

【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】車線追従性とドライバ協調性とを考慮して、運転者に違和感のない車線維持制御を行うことができる車線維持支援装置を提供する。
【解決手段】車線追従性を重視した第1の操舵角制御から、運転者の操舵操作が反映され易い第2の操舵角制御へ移行したとき、第2の操舵制御において、所定期間、直前の第1の操舵角制御で算出した制御電流指令値Irと等しい制御電流指令値Irを算出するための仮想的な操舵角偏差Δθ(=θr−θ)に応じて、制御電流指令値Irを算出する。仮想的な操舵角偏差Δθは、上記所定期間内に実際の操舵角偏差Δθ(=θr−θs)に一致するように連続的に遷移する。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
ステアリング装置、及びステアリング制御方法
【課題】操舵制御を停止する際の誘導感を軽減する。
【解決手段】前方物体との接触を回避する必要が発生したときに、先ず前方物体との接触を操舵回避できれば(ステップS2の判定が“Yes”)、目標回避軌道を算出し(ステップS3)、その目標回避軌道を実現する操舵角となるように、電動モータ20を駆動制御する(ステップS4)。一方、操舵回避できなければ(ステップS2の判定が“No”)、操舵速度θ′に応じて目標操舵反力を算出し(ステップS5、S6)、この目標操舵反力を実現するトルクとなるように、電動モータ20を駆動制御する(ステップS7)。
(もっと読む)
車両用操舵装置
【課題】速やかに高精度の温度推定を実行可能として、より適切にフェールセーフを図ることのできる車両用操舵装置を提供すること。
【解決手段】ECU16は、モータ14に対する駆動電力の供給により発熱する部位の温度を推定する。また、その温度推定の対象となる発熱部位は、車室X1内に配置されるものであって、ECU16は、当該温度推定の基礎となる雰囲気温度の値を、始動時に初期値として設定された雰囲気温度最高値から車室温相当値(車室温Tr+マージン)まで、時間経過とともに徐々に低下させる。そして、ECU16は、更に、車室X1に設けられたエアコン20の制御に用いられる状態量に基づいて、その雰囲気温度の初期値に設定される雰囲気温度最高値を決定する。
(もっと読む)
車両の挙動支援装置及び車両の挙動支援方法
【課題】転舵輪の路面限界舵角をより精度よく導出できる車両の挙動支援装置及び車両の挙動支援方法を提供する。
【解決手段】ECUは、車両がアンダーステア状態になったと判定した場合(ステップS16が肯定判定)、アンダーステア状態になった時点の車両の車体速度VS及びステアリングホイールの操舵角θに基づき摩擦限界舵角σ_fを導出し(ステップS17)、その後、路面の悪路指数Nrwを演算する(ステップS18)。続いて、ECUは、路面の悪路指数Nrwが大きいほど大きくなるように補正角度Δσを設定する(ステップS19)。そして、ECUは、摩擦限界舵角σ_fと補正角度Δσとの和を路面限界舵角σmaxとし(ステップS22)、前輪の転舵角σの絶対値が路面限界舵角σmax以下となるように転舵角調整制御を行なう(ステップS23)。
(もっと読む)
挙動制御装置
【課題】車両の運転者がカウンターステアをおこなった時に車両の挙動に違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように、車輪の転舵角を制御する挙動制御装置において、車両が旋回走行している際に外乱で発生した車両の挙動変化を修正するために、操舵角を減少させる方向にステアリング装置を戻すカウンターステアがおこなわれたか否かを判断するカウンターステア判断手段(ステップS3)と、カウンターステア判断手段(ステップS3)によりステアリング装置を戻すカウンターステアがおこなわれたと判断された場合は、その判断時点以前に求められていた目標ヨーレートを選択するヨーレート選択手段(ステップS4,S11,S5)とを備えている。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
(もっと読む)
車両用転舵制御装置
【課題】車両を走行中の車線上から逸脱しにくくすることにある。
【解決手段】自車位置検出手段が、走行中の車線上での車両の車線幅方向の位置を検出し、また操舵方向検出手段1が、ステアリングホイールの操舵方向を検出し、そしてヨー角制御手段3が、ステアリングホイールの操舵方向が車両を走行中の車線上から逸脱させる方向である場合の方が車両を走行中の車線上の車線幅方向目標位置に接近させる方向である場合より、ステアリングホイールの操舵角に対する車両のヨー角変化を小さくすることを特徴とする車両用転舵制御装置である。
(もっと読む)
操舵制御装置
【課題】互いに干渉しない独立した二つの操舵機構を備え、双方において操舵補助力の伝達ロスの発生を防止し得る操舵制御装置を提供する。
【解決手段】ステアリングホイール1に連係される第1操舵軸3と、いわゆるラックピニオン機構を介して転舵輪2L,2Rに連係される第2操舵軸7と、がクラッチ11を介して分離してなる操舵制御装置であって、運転者の操舵力を補助する二つの第1、第2操舵機構8,10を設けると共に、第1操舵機構8を第1操舵力発生モータ16によってピニオン軸6に回転力を付与する構成とし、第2操舵機構10を油圧によってラックバー5に推進力を付与する構成とした。
(もっと読む)
車線維持支援システム
【課題】煩雑な操舵操作を招くことのない車線維持支援システムを提供すること。
【解決手段】本発明による車線維持支援システム1は、車両Cの前方を撮像する撮像手段10と、撮像手段10の撮像した前方の画像から車両Cの前方の車線中央に対する車両のオフセット距離及び偏向角と、車線中央の曲率を検出する検出手段8aと、オフセット距離及び偏向角と曲率に基づいて車両を車線中央に維持するように車両の操舵装置6を制御する操舵制御装置に操舵指令を出力する車線維持手段8bとを備えるとともに、操舵装置6が入力側の駆動軸2の入力側操舵角を出力側の駆動軸4の出力側操舵角で除したギア比を可変とする操舵角可変機構3を備え、検出手段8aが検出した曲率に基づいてギア比を変更するギア比変更手段8cを備えることを特徴とする。
(もっと読む)
車輪転舵制御装置
【課題】車輪転舵用アクチュエータの駆動中にその駆動量における変動の検出が中断された場合に、実際の変動量と検出される変動量との間に生じた乖離を解消できる車輪転舵制御装置を提供すること。
【解決手段】車輪転舵制御装置100は、車輪を転舵させるアクチュエータ5の駆動量における相対的な変動量を検出する変動量検出手段10と、変動量検出手段10が検出した変動量に基づいて車輪の転舵量を推定しながら車輪の転舵を制御する車輪転舵制御手段11と、変動量の検出が中断されるか否かを判定する中断判定手段14と、変動量の検出が再開されるか否かを判定する再開判定手段15と、変動量に関する情報を不揮発性記憶媒体に記憶する変動量記憶手段12と、中断前の変動量の推移に基づいて検出再開後の変動量を算出する変動量算出手段13とを備える。
(もっと読む)
車両用操舵制御装置および方法
【課題】 自動転舵制御時、運転者にハンドルの拘束感を与えることを防止できる車両用操舵制御装置および方法を提供する。
【解決手段】 操舵コントローラ10は、自動転舵制御時、検出された転舵反力と推定された転舵反力との差分である転舵反力差分の変化量を積分して転舵反力補正値を算出し、転舵反力差分と転舵反力補正値との差分に応じた操舵反力をハンドル1に付与する。
(もっと読む)
車両の操舵制御装置
【課題】 トルクセンサによって検出された操舵トルクの信頼性をアシストトルクの付与制御に反映させることができる車両の操舵制御装置を提供すること。
【解決手段】 電子制御ユニット24は、バッテリ電圧センサ21によって検出された電源(バッテリ)の電圧V_BATに基づき、操舵トルクセンサ23による操舵トルクTの検出信頼性の程度を表す信頼性レベルを判定する。そして、電子制御ユニット24は、判定した信頼性レベルに基づき、EPSモータ15を駆動させて運転者による操舵ハンドル11の回動操作に対して付与する目標アシストトルクTaを計算するために用いるアシストマップにおける不感帯の大きさを変更する。すなわち、電子制御ユニット24は、信頼性レベルが悪化するほど、アシストマップにおける操舵トルクTの不感帯の大きさがより大きくなるように変更する。
(もっと読む)
走行支援装置
【課題】滑らかな操舵感を実現しつつ、車両の車線逸脱を抑制することができる走行支援装置を提供する。
【解決手段】目標軌道40上の目標地点401,…,40Nと、車両2が現時点以降に走行すると予測される走行軌道42上の2個以上の走行地点421,…,42Nとの横方向誤差が減少するよう2個以上の補正量を演算し、演算した補正量に基づいて車両2の操舵状態を補正することを繰り返す。このため、車両2の操舵状態は、最終的な目標地点40Nへ一直線状に車両2が移動するよう補正されるのではなく、走行軌道442のように曲線状に車両2が移動するよう補正される。従って、車両2の車両挙動の急変を抑制して、運転者が違和感を覚えない滑らかな操舵感を実現しつつ、車両2の横方向誤差を減少させて、車線4からの車両2の逸脱を抑制することができる。
(もっと読む)
操舵支援装置
【課題】運転者のハンドル操作に応じた適切な操舵支援が行える操舵支援装置を提供すること。
【解決手段】車両の前方の走行路を撮像した画像に基づき車両が走行路に沿って走行するように操舵機構に操舵トルクを加える操舵支援装置であって、車両の運転者によるハンドル2の操作があったか否かを判断し、ハンドル2の操作があったと判断された場合、ハンドル操作がないと判断される場合と比べて操舵トルクの変化率の制限値を小さく設定する。これにより、ハンドル操作により運転者が違和感を覚えることを抑制することができ、適切な操舵支援が行える。
(もっと読む)
路面区画マーク認識装置および車線逸脱防止装置
【課題】高温下で車載カメラを必要以上に停止させないことにより、白線認識装置の稼動率を向上させること。
【解決手段】路面の区画マークを認識する路面区画マーク認識装置であって、車両前方の路面を撮像する車載カメラと、複数の種類の路面区画マークにそれぞれ対応する複数の画像処理モードを有しており、前記車載カメラで撮像した路面画像に含まれる路面区画マークの種類を識別し、前記複数の画像処理モードの中から対応する一つの画像処理モードを選択し、選択された画像処理モードで路面区画マークを認識する画像処理部と、前記車載カメラの温度を測定する温度測定部と、前記温度測定部で測定された温度が閾値以上である場合に前記車載カメラの動作を制限する制限部とを備え、前記閾値は、各前記画像処理モード間で異なることを特徴とする。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作度合のみならず、車両の安全走行の観点から、車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の運転操舵度合Ddが低いほど支援閾値THが低く設定される。そして、車両の安全走行のために必要な車両1の運転支援量Spが支援閾値TH_Sp以下であることを要件として、操舵装置11および制動装置12のうち一方または両方の動作が制御される。これにより、車両1の運転操作度合Ddが低くても、車両1の運転支援の必要性が低い場合には操舵装置11等の動作が制御される確率が低くなる。その一方、運転操舵度合Ddが高くても、車両1の運転支援の必要性が高い場合には操舵装置11等の動作が制御される確率が高くなる。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線の幅方向中央から幅方向左右の少なくとも一方にオフセットした位置である横方向変位閾値を設ける。そして、少なくとも左右の横方向変位閾値以内に自車両が位置する場合には、走行車線に対する角度偏差が小さくなるようにフィードバック制御(ヨー角制御)を行う。また、走行車線中央に対し左右の横方向変位閾値よりも外に自車両がいる場合には、主として横変位偏差が小さくなるようにフィードバック制御(横位置制御)を行う。さらに、上記制御の基礎とする情報に基づき、運転者の感覚に制御の報知をするための刺激を付与する。
(もっと読む)
21 - 40 / 410
[ Back to top ]