
Fターム[3D233CA21]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 制御、制御対象 (3,368)
Fターム[3D233CA21]の下位に属するFターム
減速機 (293)
駆動力取出し機構(クラッチ) (106)
操舵の中立位置制御 (92)
Fターム[3D233CA21]に分類される特許
2,861 - 2,877 / 2,877
電動パワーステアリング装置

【課題】ステアリングの切り込みの状態に関係なく常に操舵性を良好に保ちつつストロークエンドでの衝撃を緩和することができる電動パワーステアリング装置を提供する。
【解決手段】ラックの位置を検出するラック位置検出手段44と、ラックの移動速度sを算出するラック速度演算手段45と、ラックのストロークエンド近傍における予め設定したラック速度sとラック速度sに応じてストロークエンドからの距離が遠くなるモータ減衰制御開始ラック位置との関係を座標マップの関係曲線Cとして記憶する記憶手段47と、ラック速度演算手段45が算出したラック速度sとラック位置検出手段44が検出したラック位置pとの組合せ位置座標(s,p)が、関係曲線Cを越えたか否かを判別する照合手段46と、組合せ位置座標(s,p)が関係曲線Cを越えたと照合手段46が判別したときに所定のモータアシスト減少率Asに基づきモータを減衰制御するモータ減衰制御手段41とを備える。
(もっと読む)
可変伝達比ユニット、これを利用したギア比可変パワーステアリング装置及び、ギア比可変パワーステアリング装置の制御方法

【課題】小型、低コストの可変伝達比ユニット、この可変伝達比ユニットを備えたギア比可変パワーステアリング装置及び、小型、低コストの可変伝達比ユニットを採用するために有効なギア比可変パワーステアリング装置の制御方法を提供すること。
【解決手段】ギア比可変パワーステアリング装置は、第1のステアリングシャフト321と第2のステアリングシャフト322との間の回転伝達比を可変にする可変伝達比ユニット7を備えたものである。可変伝達比ユニット7は、第1のステアリングシャフト321と一体回転する第1のサーキュラスプライン791a及び第2のステアリングシャフト322と一体回転する第2のサーキュラスプライン791bを含む減速機79を有している。第1のサーキュラスプライン791aと第2のサーキュラスプライン791bとの間には、その相対回転を許容又は規制可能なように構成されたロック機構8を介設してある。
(もっと読む)
ステアバイワイヤシステム
【課題】 電気系統が失陥してもハンドル操作に対する反力を付与することが可能なステアバイワイヤシステムを提供する。
【解決手段】 本発明のステアバイワイヤシステム10によれば、電気系統が失陥しても引っ張りコイルバネ31によってハンドル11に反力を付与することができるので、ハンドル11が空転する感覚を防ぎ、ハンドル11と転舵輪50とが連結されている感覚を運転者に抱かせることができる。また、電気系統が失陥していない状態では、反力モータ45により運転状態に応じてハンドル操作に対する反力を変更することができかつ反力モータ45と引っ張りコイルバネ31とを併用することで、反力モータ45のみによって反力を発生させる場合に比べて省エネを図ることができる。
(もっと読む)
電動パワーステアリング
電動機として電子的に転流される特別な種類のリラクタンスモータまたは直巻電動機が使用される自動車用電動パワーステアリングを提供する。電子制御装置および電動機のエラー状態を認識するために十分な機構が回路装置15に設けられ、電動機はリレイ16によって、または安全装置17の下流でサイリスタ18を使用して電源に短絡することによって電動機が電源から切り離される。 (もっと読む)
車両用操舵装置
【課題】 バックアップ手段を備えたステア・バイ・ワイヤシステム方式の車両用操舵装置において、最大転舵角付近での転舵モータの駆動負荷を抑制し、転舵モータの小型軽量化を図る。
【解決手段】 ステアリングホイール9と転舵モータ29,30とを機械的に連結するバックアップ装置2と、バックアップ装置2を解放状態にしてステアリングホイール9のステアリング操作に応じて転舵モータ29,30を駆動するSBW制御と、バックアップ装置2を連結状態にしてステアリングホイール9からのドライバの操舵力に補助操舵力を付加するように転舵モータ29,30を駆動するPS制御とを行う第1制御コントローラ4aとを備え、第1制御コントローラ4aは、前輪27,27の転舵角が所定の第1設定舵角Ydeg以上となったときには、SBW制御からPS制御に移行する。
(もっと読む)
電気式操舵システムにおけるタイヤ横力の決定方法
電気機械式又は電気油圧式操舵システムを備えた自動車における横力の計算方法を提案する。この方法は、以下の工程を有する。先ずは、ステアリングロッド力を検出し、それから、復元トルク全体を計算する。復元トルク全体は、車輪に作用する様々な力によって引き起こされる復元トルクを含む。これらの復元トルクには、横力によって引き起こされる復元トルクとその他の復元トルクが有る。その他の復元トルクは、測定値にもとづき量的に検出して、復元トルク全体から引き算し、横力によって引き起こされる復元トルクを決定する。最後に、横力によって引き起こされる復元トルクから、横力を算出する。  (もっと読む)
(もっと読む)
電動パワーステアリング装置の制御装置
本発明は、モータに対し弱め界磁制御を実行したときや、モータ循環電流に基づくトルクリップルによって引起こされるモータ振動、騒音を抑制する電動パワーステアリング装置の制御装置を提供する。そのため、弱め界磁制御を実行したときに発生するトルクリップル又はモータ循環電流に基づくトルクリップルを抑制できる基本の補正電流とロータ位置との関係を予め実測し、その基本の補正電流に弱め界磁電流の大きさ、ロータの角速度の大きさ、或いは循環電流の電気角を考慮して調整した補正電流を本来の電流指令値に加算してモータの出力トルクを制御する。 (もっと読む)
車両用ステアリングシステム
本発明は、車両用ステアリングシステム(2)、特に油圧作動のパワーステアリングシステムに関するもので、当該システムは、ステアリング部材(3)の一端を第1回転要素(6)を用いてステアリングバルブのロータリースライドバルブまたはロータリーピストン(4)に接続しているステアリングシャフト(2)を備えている。このステアリングシステム(1)は、ステアリング機構の(9)の出力要素(8)を作動させる油圧サーボモータ(7)と、油圧サーボモータ(7)の作動空間内での高圧媒体の流れを制御するステアリングバルブ(5)と、電動サーボモータ(10)によってさらに作動される出力要素(8)と、を備えている。本発明は、安全性を内包した油圧サーボモータが機械式ステアリング部材と電動サーボモータとの両方によって支援されるステアリングシステムを提供することを目的としている。このため、電動サーボモータ(10)とステアリングシャフト(2)は、第1回転要素(6)とロータリースライドバルブまたはロータリーピストン(4)との間に位置する共通回転要素(11)上で作動する。  (もっと読む)
(もっと読む)
バイラテラルサーボ制御装置
従来の力帰還型あるいは並列型バイラテラルサーボ構成に必要なマスタの位置(回転運動においては角度)センサと力(回転運動においてはトルク)センサを互いに冗長センサとして使用する。力帰還型あるいは並列型バイラテラルサーボにおいて、故障したセンサを他のセンサにより代替してスレーブの目標位置(角度)を決定することができるため、制御動作を継続することができる。また、本来はバイラテラルサーボのために備えたセンサを冗長センサの代わりに活用するので、より低いセンサの冗長度で所定の信頼度を有する制御装置が実現可能となる。 (もっと読む)
電動パワーステアリング装置
車両のハンドル戻しの状態において発生するモータ電流とPWM信号のデューテイ比の関係に生ずる不連続非線形特性を線形化し、ノイズの発生を
抑え、円滑な操舵感覚が得られる電動パワーステアリング装置である。電動パワーステアリング装置の電子制御回路13は、操舵補助指令値演算器22Aにつながる電流制御器22Bから出力されるVrefを電流駆動線形化補償器23で演算してVref2を算出し、補償加算器25で処理してデューテイD1を得、またVref2を電流不連続補償器23で処理してデューテイD2を得る。モータ駆動回路35のHブリッジ回路の上段FET1をデューテイD1で駆動し、上段FET1と対となる下段FET3をデューテイD2で駆動する。これによりモータ電流対PWM信号デューテイ比特性を連続線形化することができる。
(もっと読む)
ステアリングシステム
車輌用のラックアンドピニオン式ステアリングギアはハウジング(2)と、ハウジング内で第1軸線(14)の周りに回転可能なピニオン(1)と、ハウジングに対して横変位可能なラック(7)と、ピニオン(1)とラック(7)との間に介挿され、それぞれに噛合し、第2軸線(9)の周りに回転可能な中間ギア(8)とを具える。第2軸線(9)は、作動機構によって、少なくとも1つの車輌のパラメータに応じて、ハウジングに対して横移動可能であり、これにより、その車輌のパラメータに応じて、ピニオンの角変位と、ラックの横変位との間の関係が変化する。
 (もっと読む)
(もっと読む)
カップリングユニットを駆動する方法
少なくとも2つのカップリング巻線(71,72)を有する電気機械的カップリングユニット(4)を駆動する方法および本発明に基づく方法を実施するための操舵システムが記載されている。設けられているカップリングユニット(4)は,2つのカップリング巻線(71,72)にもはや電気的エネルギが供給されない場合に初めて閉成し,それによって機械的カップリングを形成する。 (もっと読む)
アクティブな車線維持支援装置
本発明は、車両運転者の状態を監視するために使用される方法に関する。車両が走行する車道区分線(3)が検知され、走行方向が決定され、車両は車線にとどまるために、前記車線を進まなければならない。車両運転者は、車線にとどまるために、ハンドルの自動センタリングによって支援される。車両が所定の時間にわたって決定された走行方向を正確に進む場合には、これは、運転者が積極的に車両のかじを取っていないというサインであり、警告信号が発せられる。  (もっと読む)
(もっと読む)
電動パワーステアリング装置
電動モータの回転位置情報とその電動モータの目標電流値とを用いて、当該モータを流れる電流の所定の高次成分に起因するトルクリップルを打ち消すための電流高次成分用の補償値を決定する電流高次歪み補償部と、この電流高次歪み補償部からの補償値を用いて、上記目標電流値を補正する補正部とを設ける。そして、フィードバック制御部が、補正部によって補正された後の目標電流値に基づいて、電動モータをフィードバック制御する。これにより、電流高次成分に起因するトルクリップルを抑えることができ、よって操舵フィーリングの低下を抑制することができる。  (もっと読む)
(もっと読む)
駐車操作中に運転者を支援するための方法
本発明は、例えば、駐車操作又は位置決め操作のような運転操作中に車両(10)の運転者を支援するための方法に関する。前記方法によれば、車両(10)を移動させるための基準軌道(16)が決定される。基準軌道(16)に沿って車両を案内するために適用すべきハンドル位置は、運転操作中に運転者に指示される。運転者が適用する実際のかじ取り角と、要求されたハンドル位置に対応する目標かじ取り角との間のかじ取り角偏差は、運転者とは独立して補正される。 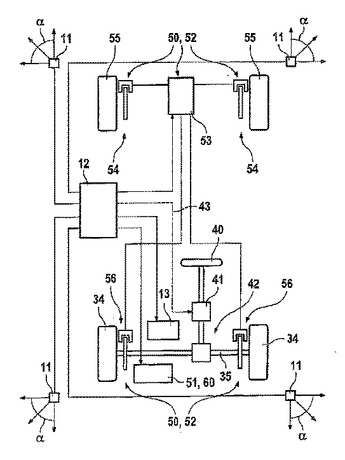 (もっと読む)
(もっと読む)
重畳ステアリング装置を備えた車両のステアリング方法
重畳ステアリングシステムを備えた車両のステアリング方法であって、ドライバーによって与えられるステアリング角及び追加の角度(付加ステアリング角)を算出するとともに、その結果として得られるステアリング角を設定するために、この与えられたステアリング角に対して、重畳アクチュエーターを用いて、特に電動モーターを用いて、かつ重畳伝動装置を介して、別の値、特に走行動特性に関する値に応じて、この付加ステアリング角を重畳することが可能である方法において、このステアリングシステムの結果として得られるステアリング角にもとづき、並びにこの付加ステアリング角に直接的に依存する、或いはこの付加ステアリング角を表す値にもとづき、この重畳伝動装置の伝動装置入力角
【数1】
(53)に関する値を算出することを特徴とする方法。  (もっと読む)
(もっと読む)
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 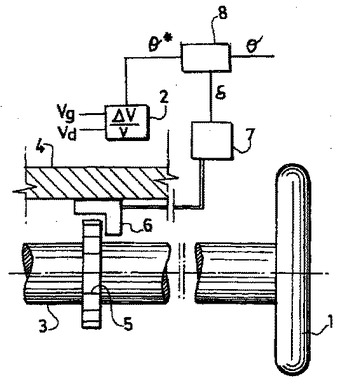 (もっと読む)
(もっと読む)
2,861 - 2,877 / 2,877
[ Back to top ]