
Fターム[3D233CA38]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 操舵比可変機構 (564)
Fターム[3D233CA38]に分類される特許
1 - 20 / 564
車両用操舵装置
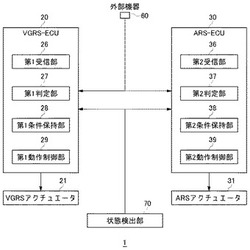
【課題】ラジオノイズの検査や動作確認検査などを効率よく行うことのできる車両用操舵装置を提供する。
【解決手段】状態検出部70が、車両の状態を検出する。VGRS−ECU20において第1受信部26が外部からコマンドを受信すると、第1判定部27は、車両駆動手段の停止中に、検出される車両状態が、所定の検査モード移行条件を満たしているか判定する。第1動作制御部29は、所定の検査モード移行条件が満たされたことが判定されると、VGRSアクチュエータ21を検査モードで動作可能とさせる。
(もっと読む)
車両操舵制御システム

【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
ステアリング装置
【課題】シンプルな構成で軽量化しつつ、コストを抑えたステアリング装置を提供する。
【解決手段】ステアリング装置において、入力軸32は、ステアリングホイールの操舵力が入力される。伝達比可変装置30は、入力軸32に連結される遊星歯車機構を有し、入力軸32の入力量に対する出力量の入出力比を変化させる。出力部54は、遊星歯車機構に接続され、出力量に応じて回転する。ロッド12,14は、一端が出力部54に連結し、他端が車輪24,26に連結して出力部54の回転に応じて車幅方向に移動する。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
電動パワーステアリング装置
【課題】絶対位置センサまたは絶対操舵角センサを用いることなくラック軸位置を検出できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部32は、舵角センサ12によって検出される相対操舵角θsに基づいて、第1のピニオン17の角速度ωsを演算する。また、q軸電流指示値生成部32は、ロータ回転角θaに基づいて、第2のピニオン22の角速度ωaを演算する。q軸電流指示値生成部32は、第1のピニオン17の角速度ωsと第2のピニオン22の角速度ωaとの比(角速度比ωa/ωs)を演算する。軸電流指示値生成部32は、角速度比ωa/ωsと、ラック軸位置とラックゲイン比Gs/Gaとの関係を記憶したマップと、に基づいて、現在のラック軸位置を求める。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】複数の演算制御装置による車両制御において、異常状態から正常状態への復帰を適切に行うことができる車両制御システムおよび車両制御方法を提供することを課題とする。
【解決手段】本発明は、通信手段により互いに通信可能に接続された第1演算制御装置と第2演算制御装置とを備える車両制御システムであって、第2演算制御装置は、第1演算制御装置により演算された第1の目標制御量と、第2演算制御装置により演算された第2の目標制御量との差が、第1閾値以下である場合は、通信状態が正常であることを示す監視結果を、第1演算制御装置へ送信し、第1演算制御装置は、第2演算制御装置により送信された監視結果が正常であり、かつ、第1の目標制御量が第2閾値以下であると判定した場合、第2演算制御装置に転舵制御を実行させる。
(もっと読む)
舵角比可変操舵装置
【課題】応答性が良くて剛性感のある良好な操舵フィーリングを得ることができる舵角比可変操舵装置を提供する。
【解決手段】舵角比可変機構15は、操舵部材とトーションバーを介して連結された入力軸と、転舵機構に連結された出力軸を接続する。操舵部材の操作に基づく第1舵角にVGRモータ21の駆動に基づく第2舵角θtmを上乗せすることにより、舵角比を可変する。VGR制御部16が、操舵角θs や車速Vに基づいて演算された基礎成分θtmk * に、ねじれ角センサにより検出された、トーションバーのねじれ角δに基づいて演算された補償成分θtmh * を重畳することにより、第2舵角の制御目標値δtm* を演算する。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
伝達比可変装置
【課題】ロック作動時の瞬間的な衝撃力に対する耐滑り性を向上させるとともに、差動機構の異常時における操舵性能を維持することのできる伝達比可変装置を提供する。
【解決手段】ロック装置は、外周面に係合爪60が係合可能な補助係合溝が形成された補助ロックホルダ101を備え、同補助ロックホルダ101をモータ軸の軸方向においてロックホルダ53と並置するとともに、モータ軸に対して相対回転不能に固定した。また、ロックアーム54を、係合溝及び補助係合溝に係合可能な第1係合位置と係合溝のみに係合可能な第2係合位置との間で移動可能に設けた。そして、駆動機構55は、モータ軸の回転を拘束するロック作動時において、ロックアーム54が第1係合位置にある状態でモータ軸の回転を拘束した後、該ロックアーム54を第2係合位置に移動させるようにした。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、操舵角センサ31により検出した操舵角に基づき基準伝達比を算出する。ECU40は、算出した基準伝達比をラック6の位置に基づき補正することで補正伝達比を算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準伝達比の値がより小さくなるよう補正することで補正伝達比を算出する。ECU40は、ラック6の位置に基づき前記基準伝達比または前記補正伝達比のいずれかを伝達比として決定する。ECU40は、決定した伝達比に基づき第1アクチュエータ22の駆動を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの回転角速度に基づいて精確に電動モータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータ方程式に基づいて電動モータの回転角速度を算出する。そして、電動モータの運動状態に基づいてモータ方程式の近似式を算出し、この近似式に基づいてモータ方程式の逆起電圧定数を更新する。電動モータのトルクが付与される駆動体の動作に応じて信号を出力するセンサと、センサの出力信号に基づいて電動モータの回転角速度の演算値を算出する演算器とを備え、電動モータの電流の測定値が所定範囲内のとき、電動モータの電圧の測定値および前記回転角速度の演算値を記憶し、記憶した電圧の測定値の数または回転角速度の演算値の数が所定数以上のとき、近似式を算出する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】切り戻し操舵時に違和感を生じさせることなく、ステアリング中立近傍において切り込み操舵時の応答性を向上させることのできる車両用操舵装置を提供すること。
【解決手段】ギヤ比可変制御演算部23は、ステアリング中立近傍の小舵角領域において、そのステアリングギヤ比が、よりクイックな値となるように、操舵角θsに応じたギヤ比可変指令角θvg*を演算する。また、ギヤ比可変制御演算部23は、運転者によるステアリング操作の状態(操舵状態)が「切り込み」又は「切り戻し」の何れであるかを判定する操舵状態判定部34を備える。そして、ギヤ比可変制御演算部23は、その操舵状態が「切り戻し」である場合には、直前のステアリングギヤ比が維持されるように、そのギヤ比可変指令角θvg*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】電流センサが故障した場合でも、アシスト制御中にモータの断線や短絡といった異常を検出できるようにする。
【解決手段】電流センサ異常検出部91により電流センサ31の異常が検出された場合、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算し、電圧値重畳部83が、基本電圧V0に、交流電圧信号生成部82から出力された交流電圧信号である重畳信号V1を加算して電圧指令値V*を求める。モータ異常検出部92は、操舵トルクtrの振動の大きさを計算し、振動の大きさが基準値未満となる場合には、モータ20の通電路に異常が生じていると判定する。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
操舵装置
【課題】ドライバが違和感を覚えることのない、ドライバの感覚に合った操舵を行うことができるようにする。
【解決手段】予め定められたハンドルの舵角と車両に発生するヨー角速度との関係を実現することにより、ドライバの視点から見た、車両の走行する目標コース上の予め定められた前方注視時間後の目標到達点の方向θgazeβと、ハンドルの基準位置の方向δswとを一致させるように定められた、ハンドルの舵角とヨー角速度ゲインとの関係を示すマップに従って、ヨー角速度ゲインの目標値を算出し、ステアリングギヤ比を制御する。ドライバの手応え量が、ヨー角速度の増加に従って単調増加する、ヨー角速度と手応え量との予め定められた関係に基づいて、検出された舵角及び取得されたヨー角速度に対応する操舵トルクを目標値として設定し、操舵トルクの目標値が実現されるように制御する。
(もっと読む)
トルクリミッタ、伝達比可変装置及びトレランスリング
【課題】衝撃力が作用した場合に滑りトルクが低下することを抑制できるトルクリミッタ、伝達比可変装置及びトレランスリングを提供する。
【解決手段】トレランスリング64は、帯状の金属板をモータ軸34及びロックホルダ52の周方向に延びる略C字状に湾曲させたリング本体65を備え、同リング本体65に径方向に弾性変形可能なバネ状部66を形成した。そして、バネ状部66をモータ軸34とロックホルダ52との間に圧縮状態で配置されるメイン突起71と、非圧縮状態で配置されるサブ突起72とから構成した。さらに、メイン突起71及びサブ突起72により構成される凹部の全部又は一部にグリースを貯留した。
(もっと読む)
車両の走行制御装置
【課題】車両挙動が安定した状態で且つドライバに違和感、不快感又は不安感を与えることなく軌跡制御を開始又は再開する。
【解決手段】車両の軌跡を該車両の運転者による操舵入力と無関係に変化させることが可能な軌跡可変装置を備えた車両における走行制御装置は、前記車両の軌跡が目標軌跡となるように前記軌跡可変装置を制御する軌跡制御手段と、前記車両の操舵速度を検出する操舵速度検出手段と、前記検出された操舵速度が、基準時間以上の期間について基準速度以下である場合において、前記軌跡制御手段による前記目標軌跡に応じた軌跡制御の実行を許可する許可手段と、車速が高い程低くなるように前記基準速度を設定すると共に車速が高い程長くなるように前記基準時間を設定する設定手段とを具備する。
(もっと読む)
1 - 20 / 564
[ Back to top ]