
Fターム[3D244AC51]の内容
Fターム[3D244AC51]に分類される特許
1 - 20 / 99
車両の走行制御装置
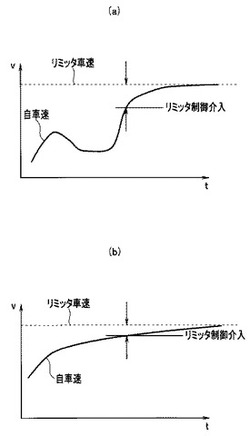
【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
車両の走行制御装置

【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
運転支援装置
【課題】必要な状況にのみ走行支援を行ない、運転者が違和感を覚えることなく自車両の衝突を防止することのできる運転支援装置を提供する。
【解決手段】障害物と自車両Cとの衝突を回避するための衝突回避制御を行なう運転支援装置1において、自車両Cの前方の信号機Sに関する信号機情報に基づいて自車両Cが減速するか否かを予測する予測部22と、減速が予測された場合に衝突回避制御の実行を抑制する制御部23と、を備える。この構成により、自車両Cの減速が予測された場合に、衝突回避制御の実行が抑制される。これにより、自車両Cの減速が予測されたため衝突回避制御の実行は不要と予測される状況で衝突回避制御は抑制されるといったように、信号機情報に基づいて必要な状況にのみ、走行支援としての衝突回避制御が行われ、運転者が違和感を覚えることなく自車両Cの衝突を防止することができる。
(もっと読む)
車間制御装置
【課題】運転者が感じる違和感を低減することができる車間制御装置を提供する。
【解決手段】車間制御装置1は、ECU2を備えている。ECU2は、先行車両に追従するように自車両10の走行を制御する。また、ECU2は、顔向きセンサ4及び車内機器5から出力された各信号値に基づいて運転者の顔向き及び車内機器5の操作状況を検出し、これらに基づいて運転者の走行に対する注意力の度合いを求め、かかる注意力の度合いに応じてACC制御の加速ゲイン値及び減速ゲイン値の少なくとも一方を変更する。よって、ACC制御の際、先行車両に対する注意力に応じて加減速勾配が制御されることとなる。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】加速を許容すべきか否かを的確に判断し、適宜、車速制限を解除する。
【解決手段】自車両の斜め後方に後方車両を検出したら(ステップS4の判定が“Yes”)、自車両に対する後方車両の接近度合を判断する。このとき、後方車両が自車両の近距離に位置する(ステップS5の判定が“Yes”)、又は自車両に急接近していれば(ステップS6の判定が“Yes”)、自車両の運転者に車線変更の意志があるか否かを判断する。そして、自車両の運転者が、後方車両が接近してくる側へ車線変更しようとしているのであれば(ステップS8の判定が“Yes”)、車速制限を解除し(ステップS3)、加速を許容する。車速制限を解除するときには、ディスプレイ11及びブザー12を駆動することにより、車速制限を解除する旨を、表示や音声によって運転者に報知する。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、ACC制御の実行中に、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に、先行車が存在するときは、車間制御ECU20及びブレーキ制御ECU42は先行車の減速度に応じて自車両を減速させる。これにより、運転者が居眠り等の状態にないにも関わらず、運転者の意図に反して速度が低下することが少なくなり、安全性を確保しつつ運転者に与える違和感を軽減することが可能となる。
(もっと読む)
車間距離制御装置
【課題】自車両が被牽引車両を牽引する場合に安全な制動距離を確保することができると共に、走行安定性を高めることができる車間距離制御装置を提供すること。
【解決手段】自車両と先行車両との車間距離を制御する車間距離制御装置10において、自車両が被牽引車両を牽引しているか否かを判定する判定手段12と、自車両と先行車両との目標車間距離を判定手段12の判定結果に応じて決定する車間距離決定手段14と、自車両の目標加減速度を判定手段12の判定結果に応じて決定する加減速度決定手段16と、目標車間距離及び目標加減速度に基づいて自車両を制御する制御手段18とを備える。
(もっと読む)
車速制御装置
【課題】車両の運転者によって制限速度が視認された場合にのみ自車両の速度変更を行い、運転者に不快感や違和感を与えるのを防止することができる車速制御装置を提供する。
【解決手段】車室内に配置され運転者による操作入力が可能なスイッチ6と、運転者の視点位置を検知する注視方向検出部5と、道路標識および道路標示の位置と運転者の視点位置とが一致した状態でスイッチ6からの入力があったことを判定する注視対象判定部7とを備え、速度制御部8は、注視対象判定部7により道路標識および道路標示の位置と運転者の視点位置とが一致した状態でスイッチ6からの入力があったと判定された場合に、自車両の速度が制限速度になるように速度制御を行うことを特徴とする。
(もっと読む)
車速制御装置、車速制御方法
【課題】先行車両との関係に応じて上限車速が可変に設定される車速制御装置及び車速制御方法を提供すること。
【解決手段】先行車両が補足された場合は予め定められたセット車速31を上限に追従走行する追従走行手段24、25と、アクセルペダル14が踏み込まれても予め設定した上限車速により車速を制限する上限車速制限手段23と、を有する車速制御装置100であって、アクセルペダル14の操作を検出するアクセルペダル操作検出手段19と、先行車両との相対速度を検出する相対速度検出手段12と、自車両の車速を検出する自車両速度検出手段11と、相対速度から先行車両に接近していると判定され、かつ、アクセルペダル14の操作が検出された場合、上限車速32を先行車両の車速以下に設定する上限車速変更手段21と、を有することを特徴とする。
(もっと読む)
車両用オートクルーズ装置
【課題】セットスイッチのみを1回操作するだけでオートクルーズ走行を開始することができ、かつ誤操作を防止できる車両用オートクルーズ装置を提供する。
【解決手段】車両に搭載されたオートクルーズ制御コンピュータ25は、この車両がオートクルーズに適した速度で走行し、車速変動とアクセル操作の変動が所定値以内であり、車間距離が適正値以上に保たれ、ブレーキが作動しない、という条件が全て満たされた状態が所定時間以上続いたときに、オートクルーズ受付許可状態となり、インジケータランプ21を点灯させる。オートクルーズ受付許可状態において、セット/レジュームスイッチ30を第1の方向R1に操作すると、オートクルーズ走行が開始する。オートクルーズ受付許可状態において、車速が低下するなどしてオートクルーズ受付許可状態を解除する条件が成立すると、オートクルーズ受付許可状態が解除されるとともに、インジケータランプが消灯する。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】運転者の運転特性に応じてより違和感の無い車両の走行制御を行うことができる車両用走行制御装置を提供する。
【解決手段】運転者の減速意思を検出するドライバ操作状態検出部26、アクセル操作検出部28、ブレーキ操作検出部29と、システム作動距離Lthと減速意思距離Ldとの偏差を距離偏差として算出するとともに該安全装置の作動対象となるカーブ曲率と距離偏差とを対応付けて運転特性として記憶する運転特性記憶部37と、新たに検出されたカーブ曲率と運転特性記憶部37に記憶されている運転特性とに基づいて安全装置の作動タイミングを変更する適正車両状態変更部36とを備えたことを特徴とする。
(もっと読む)
車間距離制御装置
【課題】運転者の意図に反する目標車間距離の変更を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの操作検出手段と、車速検出手段と、操作検出手段により検出した運転者の加速操作終了時又は減速操作終了時の車間距離に基づいて複数段階で目標車間距離を変更する目標車間距離変更手段とを備え、車速検出手段により検出した車速が閾値以下の場合に目標車間距離設定手段による目標車間距離の変更を抑制することを特徴とする。
(もっと読む)
車間距離制御装置
【課題】運転者の意図しない目標車間距離の変更を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの検出手段と、検出手段により検出した運転者の加速操作又は減速操作に基づいて目標車間距離を変更する目標車間距離変更手段とを備え、加速操作検出手段により検出した加速操作量が加速操作量閾値を超えた場合又は減速操作検出手段により検出した減速操作量が減速操作量閾値を超えた場合に目標車間距離変更手段による目標車間距離の変更を抑制することを特徴とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の心理的状態に対応した適切な車速の制御を行うことはできなかった。
【解決手段】自車両の前方の下り勾配の道路を走行する際に前記自車両の運転者に心理的影響を与える要因を示す要因情報を取得し、前記要因情報に基づいて前記下り勾配の道路を走行する際に前記運転者に与えられる総合的な心理的影響を取得し、前記総合的な心理的影響に応じて前記自車両に搭載された車速制御部に車速を制御させる。
(もっと読む)
作業車
【課題】オートクルーズ走行の可能な作業車において、前回のオートクルーズ走行を簡単な操作で実現する。
【解決手段】走行装置伝動用の静油圧式無段変速装置のトラニオン軸を作動するトラニオン軸アクチュエータ、オートクルーズ走行を入切するオートクルーズ入切スイッチ、前記オートクルーズ走行を記憶するオートクルーズ走行記憶手段、前記オートクルーズ走行記憶手段の記憶による走行を選択するオートクルーズメモリ復帰スイッチを備えた作業車において、エンジンの再始動後の最初のオートクルーズ走行中に、前記オートクルーズメモリ復帰スイッチを押すと、エンジンの停止前のオートクルーズ走行のトラニオン軸の作動位置にトラニオン軸を作動するように構成したことを特徴とする作業車の構成とする。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントローラの設定スイッチの誤操作を抑制できるとともに、該設定スイッチの操作性を向上させる。
【解決手段】車両の走行速度を目標速度に維持するように該車両を加減速制御するクルーズ走行制御を行うACCコントローラ37を備えている車両の走行制御装置である。車両のドライバにより操作されるシフトレバー3と、少なくともP、R、N、Dの各ポジション7,9,11,13が設定され、該シフトレバー3を該各ポジション7,9,11,13に案内するためのシフトゲート5とを有している、車両の自動変速機53を操作するためのシフトレバーユニット1をさらに備えている。シフトレバーユニット1には、上記目標速度を設定するためのセットスイッチ3,45が設けられている。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール装置において、セットスイッチのオン操作直後に、乗員に対し、走行速度が目標速度に維持されていないという違和感を与えることを抑制する。
【解決手段】車両の走行速度を検出する車速センサ6と、セットスイッチ3dと、車両走行時におけるセットスイッチ3dのオン操作時に、車速センサ6により検出されたオン操作時の走行速度を車両の目標速度として設定する目標速度設定部15aと、車速センサ6により検出される走行速度を目標速度に維持するように車両を加減速させる加減速制御部15bとを備えている車両の走行制御装置である。車両の走行速度を表示する速度計11と、該速度計11を制御する速度表示制御部17aとをさらに備えている。速度表示制御部17aは、セットスイッチ3dのオン操作時から所定時間を経過するまでの間、目標速度を車両の走行速度として速度計11に表示させる。
(もっと読む)
1 - 20 / 99
[ Back to top ]