
Fターム[3D244AD09]の内容
Fターム[3D244AD09]に分類される特許
1 - 19 / 19
車両の駆動装置
【課題】車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供する。
【解決手段】車両の駆動装置は、車輪を回転させる電動機と、蓄電池を含む蓄電装置と、蓄電池に圧力を加える圧力調整装置と、車両の周辺情報を検出する周辺情報検出装置と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御装置とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含み、正極層、電解質層および負極層が粉体により形成されている。走行制御装置が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電池の放電電流の最大値を調整する。
(もっと読む)
ブレーキ制御装置

【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車両用制御装置
【課題】車両の燃費を向上させつつ、運転者の加速要求を駆動力に適切に反映させる。
【解決手段】車両用制御装置10は、車両の駆動力を発生する内燃機関Eの吸気系において吸入空気量を調整するDBWドライバ12およびDBW13とスロットル弁とを具備し、車間距離センサ33により検出される車間距離Dに基づき先行車両が存在しないと判定し、かつ、車両の発進時にアクセルペダルセンサ32により検出されるアクセルペダル開度APの変化が所定の下限閾値Lim_L以上かつ上限閾値Lim_H未満である場合に、標準発進加速状態であると判定し、内燃機関Eでの燃料消費量が最小となるようにしてスロットル弁による吸入空気量を制御する。
(もっと読む)
車両の制御装置
【課題】複数種類の駆動力源を備えた車両に対してクルーズコントロール制御を適用した場合に、運転者が違和感を持ったりショックを体感することを抑制。
【解決手段】駆動力源の出力を制御するアクセルペダルと、アクセルペダルとは別に設けられ、かつ、目標車速を制御できる車速制御装置とを備え、車速制御装置により、車両の走行車速を目標車速に近づけるように駆動力源の出力を制御する車両の制御装置において、車両がエンジンおよび電動機を有し、走行車速を目標車速に近づけるためにエンジンのみを駆動する場合に選択される第1の制御内容と、走行車速を目標車速に近づけるためにエンジンおよび電動機を駆動する場合に選択される第2の制御内容とを異ならせる駆動力源制御手段(ステップS1,ないしステップS6)を備えている。
(もっと読む)
走行制御装置
【課題】トラクション制御終了後に走行制御を自動的に復帰可能としつつも、トラクション制御と走行制御とが干渉してしまうのを防止する。
【解決手段】走行制御装置は、トラクション制御による駆動力制御期間中の駆動トルク最小値を取得し(ステップS5)、トラクション制御が終了したとき、ACCによる駆動トルク制御の上限値を規定する駆動トルク上限値にその駆動トルク最小値を設定する(ステップS7)。
(もっと読む)
交通状況に応じて車両エンジンを作動および非作動させる装置
先行車両(16)の位置を測定するセンサ(10)と、先行車両(16)の移動状態に応じてエンジンを作動および非作動させる制御装置とを有する、車両(14)のエンジンを作動および非作動させる装置において、制御装置が、同じ車線の少なくとも1つの更なる別の車両(14、18)の移動状態に応じて、エンジンの作動および非作動を制御するために設けられていることを特徴とする。 (もっと読む)
鞍乗り型車両の定速走行制御装置
【課題】定速走行制御が解除されるとき、目標スロットル開度制御においてスロットル開度が運転者の予期しない値とならず、走行フィーリングを損ねることがないと共に、不要な機関出力を生じないようにした鞍乗り型車両の定速走行制御装置を提供する。
【解決手段】定速走行制御を実行する定速走行制御実行手段を少なくとも備えた鞍乗り型車両の定速走行制御装置において、実スロットル開度が指令スロットル開度APSなどから設定される目標スロットル開度となるようにアクチュエータを駆動するスロットル目標開度制御を実行するスロットル目標開度制御実行手段を備えると共に、指令スロットル開度APSと実スロットル開度TPSが所定の関係にあるか否か判定し(S60)、肯定されると共に、解除条件が成立すると判断される場合(S62からS66)、定速走行制御からスロットル目標開度制御に切り換える(S50)。
(もっと読む)
車両用入力装置
【課題】 運転者の意図する操作内容とは異なる操作が行われても、運転者に違和感を与えることがない車両用入力装置を提供する。
【解決手段】 ステアリングホイール101の操舵の有無を舵角センサ19で検出し、舵角センサ19で検出されたステアリングホイール101の操舵角Sが所定の角度範囲の場合に、先行車追従制御システムに関する操作スイッチであるコントロールスイッチ16の操作を無効とするように構成した。これにより、ステアリングホイール101の回動位相に起因するコントロールスイッチ16の誤操作があっても、先行車追従制御システムの動作には影響がないので、運転者の意図しない内容の先行車追従制御により運転者が違和感を覚えることがない。
(もっと読む)
車両用運転支援装置
【課題】先行車を追従する車間距離制御モードにおいて、自車速を制御する際のエンジン出力変動を抑制し、安定した車速制御性を得る。
【解決手段】
エンジン1に供給する吸入空気量を可変するスロットル弁4と、吸入空気量を過給するターボ過給機5と、スロットル弁4とターボ過給機5とによりエンジン出力Tを制御して、自車速Sjを先行車との車間距離に基づいて設定した目標車速Soに収束させるエンジンECU21とを備え、エンジンECU21は、自車を先行車に追従走行させる車間距離制御モード時にターボ過給機5による過給動作を制限し、スロットル弁4の開度制御により自車速Sjを目標車速Soに収束させる。
(もっと読む)
走行制御装置
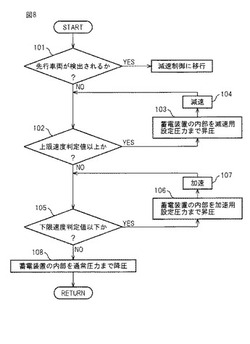
【課題】 先行車追従走行から設定車速による定速走行への移行を、走行環境に応じて適正に行う。
【解決手段】 自車線上に先行車が検出されているときは、車間距離が目標車間距離となるように先行車に追従走行し、自車線上に先行車が検出されないときは、自車速が予め設定した車速(設定車速)となるまで目標加速度で加速して設定車速で定速走行を行う走行制御装置において、自車の横方向に発生する横加速度を検出し、追従走行中の先行車が自車線上に検出されなくなり、かつ横加速度が予め設定したしきい値を超えた場合に、設定車速への加速を抑制する。
(もっと読む)
車両のオートクルーズ装置
【課題】車両の加減速を行う車両のオートクルーズ装置において、タイヤの空気圧が低下している場合に該タイヤの劣化を抑制する。
【解決手段】車両1の走行状態が所定の目標走行状態となるように車両1を加減速させる加減速制御を行う加減速制御部30aを備える車両のオートクルーズ装置であって、車両1の少なくとも1つのタイヤ19aの空気圧に関する値を検出する空気圧センサ70aと、空気圧センサ70aの検出結果に基づいて、少なくとも1つのタイヤ19aの空気圧が所定の低下状態になったことを判定する空気圧低下判定部30bと、をさらに備え、加減速制御部30aは、空気圧低下判定部30bにより少なくとも1つのタイヤ19aの空気圧が所定の低下状態となったと判定されたときに、加減速制御における加速を中断する。
(もっと読む)
内燃機関の制御装置
【課題】電子スロットルシステムに異常が生じた場合であっても、当該機関の出力の意図せぬ増大を好適に抑制することのできる内燃機関の制御装置を提供する。
【解決手段】スロットルバルブ4の実開度THは、スロットルセンサ30によって検出され電子制御装置20に取り込まれる。電子制御装置20は、実開度THを目標開度TAにフィードバック制御する。実開度THが急減するときには、点火プラグ12の遅角操作又は燃料噴射弁8による燃料カット操作を強制的に行う。
(もっと読む)
エンジン停止再始動制御装置、その方法及びそれを搭載した車両
【課題】 運転者がブレーキを踏み込むことなく車両が自動停車したときにもエンジンを自動停止させる。
【解決手段】 このアイドルストップ機能及び低車速追従走行機能を備えた自動車では、ステップS220で自動停車中フラグF2が値1であると判定されたときには、ステップS240で運転者によるブレーキの踏み込み以外のすべてのエンジン停止条件が成立したか否かを判定し、運転者によるブレーキの踏み込み以外のすべてのエンジン停止条件が成立したと判定されたときには、ステップS260でエンジンの各気筒への点火や燃料噴射を停止させてエンジンを自動停止させる。このように、車両が自動停車したときにはエンジン停止条件から運転者によるブレーキの踏み込みの条件が除かれるため、運転者がブレーキを踏み込むことなく車両が自動停車した場合であってもエンジンを自動停止させることができる。
(もっと読む)
車両用走行制御装置
【課題】 追従走行中の先行車が検出されなくなったときに、加速動作が不適切な場所で設定車速への加速動作が実行されて運転者に違和感を与えるのを防止する。
【解決手段】 自車両が走行する車線のレーンマーカーを検出して車線情報を検出し、追従走行中の先行車が検出されなくなったときに、自車線の車線情報に基づいて設定車速への加速動作の許可または抑制を判定し、その判定結果にしたがって追従走行中の先行車が検出されなくなった後の車速を制御する。
(もっと読む)
加減速度制御装置
【課題】 自動制御機能の作動中のアクセルペダルによる加速操作を容易化すること。
【解決手段】 アクセルペダルの操作ストローク内の浅い操作範囲に減速領域が形成され且つ深い操作範囲に加速領域が形成され、アクセルペダルの操作量に応じて決定される加減速度関連の目標値に基づいて加減速度を制御する1ペダルモードと、アクセルペダルの操作量又はブレーキペダルの操作量に応じて決定される同目標値に基づいて加減速度を制御する通常モードとを有し、自動制御機能の作動中は、所定車速又は先行車に対して所定車間距離となるようにアクセルペダルの操作量以外の因子によって目標値を算出すると共に、前記通常モード中に採用される決定態様に従ってアクセルペダルの操作量に応じた目標値を決定し、何れか一方の目標値に基づいて駆動力発生装置を制御して車両の加速度を制御する。
(もっと読む)
先行車追従走行制御装置
【課題】 追従走行モードの頻繁な切り替わりを防止する。
【解決手段】 先行車追従走行制御を行う全車速領域を複数の車速領域に区分し、各車速領域ごとに異なる追従走行モードを有し、自車速に応じて追従走行モードを切り換えながら、一定の車間距離を保って先行車に追従走行する先行車追従走行制御装置において、自車両の走行車線における走行道路の渋滞情報が検出された場合は、複数の追従走行モードの内のいずれかの車速領域を拡大する。あるいは、追従走行モードの切り換えが複数回行われたときの切り換え間隔の平均値である平均切り換え時間が予め設定したしきい値よりも短い場合は、複数の追従走行モードの内のいずれかの車速領域を拡大する。
(もっと読む)
車両の速度の、許容最高速度への調整設定システムおよび方法
本発明は、機関介入操作を用いて車両の実現可能な走行速度を最大値に制限する制限装置(2)と、走行期間中に許容最高速度が変化すると前記制限装置(2)が走行速度を変化した最大値に制限するようにさせるインフォメーション装置(1)とを用いて、車両の速度を許容最高速度に調整設定するためのシステムおよび方法に関する。本発明によれば、インフォメーション装置(1)は現在走行している道路タイプを識別するための装置でありかつインフォメーション装置(1)はメモリ装置(7)から現在走行している道路タイプに属している許容最高速度を読み出しかつ変更された最大値として考慮する。  (もっと読む)
(もっと読む)
車両用走行制御装置
【課題】 追従モードの移行を容易にする。
【解決手段】 先行車追従走行制御を行う全車速領域を低速領域と高速領域の少なくとも2つの車速領域に区分し、低速領域において、先行車が検出されている場合は車間距離を保って先行車に追従走行するとともに、先行車が検出されていない場合は追従走行を解除する低速追従モードと、高速領域において、先行車が検出されている場合は設定車速を上限として車間距離を保って先行車に追従走行する制御を行うとともに、先行車が検出されていない場合は設定車速一定で定速走行する高速追従モードと、全車速領域において、所定の操作部材が操作されている間、設定車速に関わらず車間距離を保って先行車に追従走行する優先追従モードとを有する。
(もっと読む)
1 - 19 / 19
[ Back to top ]