
Fターム[3D244AE15]の内容
Fターム[3D244AE15]に分類される特許
1 - 20 / 37
走行制御装置
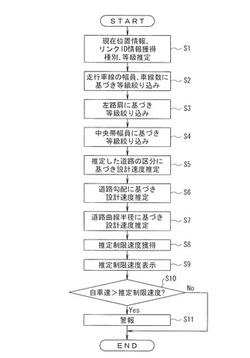
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
運転支援装置及び運転支援方法

【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
車速制限装置
【課題】無用な加減速が生じない車速制限装置を提供する。
【解決手段】車両の走行速度を検出する車速センサ11と、乗員により設定された制限速度を記憶する記憶部15と、乗員のアクセル操作に関わらず走行速度が制限速度以下となるように車速制限制御を行う電子制御装置20と、乗員の操作により車速制限制御を中断する中断スイッチ14と、乗員の操作により車速制限制御を再開する再開/増加スイッチ13と、を備えた車速制限装置1において、乗員の操作により制限速度を変更する制限速度変更手段を備え、電子制御装置20は、走行速度が記憶部15に記憶されている制限速度よりも所定値以上大きいときに制限速度変更手段が操作された場合には、制限速度を制限速度変更手段が操作されたときに車速センサ11により検出された走行速度とほぼ等しい値に変更する。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両の設定目標速度(Vcc設定目標速度)を維持するように設計されたコントロールユニットを含む車両クルーズコントロール制御方法及びシステムであって、前記コントロールユニットは、車両の総重量である第1パラメータ、現在の道路勾配である第2パラメータを登録し、該登録された第1パラメータ及び第2パラメータに基づいて、前記クルーズコントロールにおけるブレーキクルーズコントロールについての設定車両超過速度(Vbcc)を新しい値(Vbcc flex)に調節するようにプログラムされている。これにより前記クルーズコントロール及びブレーキ装置において、遅延による設定車両超過速度(Vbcc)を超える車両速度に起因する車両速度の増加が回避される。 (もっと読む)
運転解析システムおよび運転記録装置
【課題】運転者に対する安全運転教育のための運転記録を提供する運転記録装置および当該運転記録に基づいて運転状態の解析を行う運転解析システムを提供する。
【解決手段】ステレオカメラ1で撮影された画像データを記録する画像記録部2と、画像データから3次元画像情報を算出する3次元画像情報算出部3と、3次元画像情報に基づいて、画像中の動体対応画像部分を特定する動体特定部4と、3次元画像情報に基づいて自車両の速度を検出する速度算出部5と、動体との車間距離を検出する車間距離検出部6と、車間距離および速度算出部5で検出された自車両の速度等の運転情報を記録する記録部7を備えている。
(もっと読む)
車間距離制御システムを制御するための方法および関連の制御システム
本発明は、自動車用の車間距離制御システムの制御に関し、このシステムでは、制御システムのコンピュータが、CANバスを介して、設定点速度値と、インストルメントパネルコンピュータからの速度単位に関係する情報とを受信する。本発明によれば、車間距離制御システムの始動の瞬間に受信される速度単位に関係する情報がメモリに記憶され(S3)、車間距離制御システムが作動されている期間を通じて、メモリに記憶されている情報と比較することによって、受信される速度単位に関係する情報の変更が監視される(S4〜S6)。必要であれば、速度単位の異常に関係する情報項目が生成される(S7)。  (もっと読む)
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両クルーズコントロールを制御する方法であって、前記方法は、クルーズコントロールを作動状態にすると共に、車両設定目標速度(Vcc設定目標速度)を維持するように設定して、車両を運転するステップと、坂の上り坂を走行中に、車両の減速によって、車両設定目標速度より低い第1車速(Vmin)まで車速が低下し、しかも減速が0に減少した、又は車両設定目標速度まで車速を高めるために車両が加速し始めた第1車両位置(A)を登録するステップと、頂上から第1距離(y1、y2)を過ぎた地点での、頂上から下り坂の第2位置(C1、C2)における所望の車速(Vbcc超過速度)を登録するステップと、前記所望の車速に基づいて、第1距離(y1、y2)を走行中に最小限化又はゼロ燃料消費で、所望の車速に達することができるように、車両が頂上を通過しなければならない、頂上での車両最低速度(Vmin1、Vmin2、Vmin3)を計算するステップと、車両が、頂上を通過するとき車両最低速度(Vmin1、Vmin2、Vmin3)に達するように、第1車両位置(A)から頂上(B)までの第2距離(x)を走行中の車速を制御するステップとを含む。 (もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
走行制御装置
【課題】 渋滞時における加減速の抑制が図られた走行制御装置を提供する。
【解決手段】
本発明に係る走行制御装置1において、ECU2は、平均速度算出手段として、通信部4を介して自車の前方を走行している複数の前方走行車両の速度を取得し、それらの平均速度を求める。また、ECU2は、制御速度決定手段として、求めた平均速度に応じて、自車の制御速度を決定する。そのため、ECU2は、走行駆動部6や制動部7に対して所定の信号を送り、決定した制御速度での定速走行を自車におこなわせることができる。したがって、自車Nは直前の車両のみに追従するような加減速走行はせずに、複数の前方走行車両の平均速度に応じた制御速度で定速走行するため、加減速が抑制され、燃費の向上や渋滞解消の促進が図られる。
(もっと読む)
オートクルーズ制御方法と装置
【課題】坂道においても制御遅れによる車速の乱れが起こらず、搭乗者には何ら違和感を感じさせないようにしたオートクルーズ制御方法と装置を提供することが課題である。
【解決手段】予め、撮像装置38により検出した道路の勾配と車速センサ26が検出した実車速とに対応したエンジンへの燃料噴射量を、車速−勾配対応燃料噴射量記憶装置24に記憶し、撮像装置38で道路の勾配と勾配開始位置とを検出したとき、目標車速と前方道路の勾配とに基づいて、車速−勾配対応燃料噴射量記憶装置24から対応するエンジンへの燃料噴射量を読み出すか記憶されたデータから算出し、撮像装置38により検出した勾配開始位置、または前記読み出すか算出した燃料噴射量に対応するエンジン回転数となるまでの時間遅れを加えて決定した勾配開始位置より手前の位置から、前記燃料噴射量でエンジンを駆動する勾配併用制御オートクルーズにより目標車速を維持するようにした。
(もっと読む)
駆動源の制御装置
【課題】出力トルク制御の安定性を向上させる。
【解決手段】ECUは、パワートレーンドライブモデル9300と、パワートレーンマネージャ9100と、エンジン制御部9000とを含む。パワートレーンマネージャ9100は、エンジン回転数の履歴に基づく回転数の変化量と、動的な目標エンジントルクおよび推定トルクのうちのいずれか一方のトルクとに基づいて先読み時間経過後のエンジン回転数を予測する。エンジン制御部9000は、予測された回転数と動的な目標エンジントルクとに基づいてエンジン1000を制御する。
(もっと読む)
車両用減速制御装置及び車両用減速制御方法
【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、測位部14aが測位した車両位置と記憶媒体14cに記憶された地図情報とを基に、地図情報の地図上の車両位置を特定するマップマッチングを行うマップマッチング部14bと、マップマッチング部14bが特定した地図上の車両位置と地図情報とから、車両前方のカーブ曲率を検出し、検出したカーブ曲率の大きさを基に算出した目標減速度を基に、車両を減速制御する制駆動力コントロールユニット8と、を備える。制駆動力コントロールユニット8は、マップマッチング部14bによるマップマッチングの確度を算出し、算出したマップマッチングの確度が低いほど、目標減速度が小さくなるように補正する。
(もっと読む)
鞍乗型車両用の制御装置および鞍乗型車両
【課題】定速走行制御が実行される鞍乗型車両の操作性を向上させる
【解決手段】鞍乗型車両用の制御装置100は、定速走行制御の目標車速を記憶する第1記憶部101と、アクセル全閉位置からさらに閉じる方向にアクセル12が操作されたことを検知する第1検知部104を備えている。さらに、この鞍乗型車両用の制御装置は、定速走行制御中において、第1検知部104によって、当該操作が検知されたときに、第1記憶部101に記憶された目標車速を下げる減速処理部105を備えている。
(もっと読む)
車両の走行制御装置
【課題】走行ルールに違反した原因を調査可能な車両の走行制御装置を提供する。
【解決手段】車両に搭載され、当該車両の走行を制御する走行制御装置10であって、車両の周辺の走行ルールにしたがって車両の走行を制御する走行制御部35と、車両による走行ルールの違反を判定する違反判定部37と、違反判定部により走行ルールの違反が判定された場合に、走行制御部の制御内容を記憶する記憶処理部38と、を備える。
(もっと読む)
機能制限解除装置及び車両
【課題】運転者がどこでも車両機能を制限されることなく車両を走行させてしまうことを抑制する。
【解決手段】ナビゲーションユニット2が、通常は車両の速度リミッターを初期設定値V0に設定し、車両位置が速度制限解除エリア内に位置すると判別された場合、エンジン制御ユニット3を制御することにより速度制限を解除する。これにより、車両が速度制限解除エリア内に位置する場合においてのみ速度制限が解除されるので、運転者がどこでも速度制限されることなく車両を走行させてしまうことを抑制できる。
(もっと読む)
車速制限装置
【課題】無用な加減速が生じない車速制限装置を提供する。
【解決手段】車両の走行速度を検出する車速センサ11と、乗員により設定された制限速度を記憶する記憶部15と、乗員のアクセル操作に関わらず走行速度が制限速度以下となるように車速制限制御を行う電子制御装置20と、乗員の操作により車速制限制御を中断する中断スイッチ14と、乗員の操作により車速制限制御を再開する再開/増加スイッチ13と、を備えた車速制限装置1において、電子制御装置20は、再開/増加スイッチ13による車速制限制御再開時の走行速度が記憶部15に記憶されている制限速度よりも所定値以上大きく、且つ再開/増加スイッチ13による車速制限制御再開からの経過時間が判定時間未満の場合には、車速制限制御再開時の走行速度を仮の制限速度とし、この仮の制限速度に基づいて車速制限制御を実行する。
(もっと読む)
車速制限装置
【課題】制限速度を運転者の希望する値に容易に設定可能にする。
【解決手段】乗員により設定された制限速度を記憶する制限速度記憶部22と、自車両の走行速度が前記制限速度以下となるように制御する車速制御部23と、道路デ−タを記憶する道路データ記憶部12と、GPS受信器11で検出した自車両の位置および道路データ記憶部12に記憶された道路デ−タに基づいて自車両の道路位置を認識する道路位置認識部21と、を備え、制限速度記憶部22は、乗員により設定された制限速度と該制限速度が設定された自車両の道路位置とを対応させて記憶し、車速制御部23は、自車両が走行する道路位置に対応して制限速度が記憶されている場合には、自車両の現在位置に基づいて制限速度記憶部22に記憶された制限速度を選択し、この制限速度以下となるように自車両の走行速度を制御する。
(もっと読む)
車間距離制御装置
【課題】ドライバの運転暦や年齢を加味した車間距離制御を行うことで、特に初心者や高齢者にとって適切な車間距離制御を実行できるようにする。
【解決手段】前方車両と自車両との車間距離が所定の目標車間距離となるように前方車両に追従して走行可能な車間距離制御装置において、ドライバの運転暦に関する情報を取得する運転暦取得手段18と、運転暦取得手段18で得られた情報に基づいて車間距離制御に関するパラメータを補正する補正手段30とを備えるように構成する。
(もっと読む)
運転支援装置、運転制御装置、及びプログラム
【課題】運転者の加速操作の特性を考慮して、適切な運転支援を行なうことができるようにする。
【解決手段】特徴量算出部22によって、車両走行時の車速の時系列データに基づいて、車両の運転者が加速操作を行なったときの加速終了地点で目標車速が得られるように一定加速度で走行したときの加速開始からの所要時間と、加速操作を行なったときの車速の時定数とに基づいて定まる、運転者の加速特性を表わす特徴量を算出する。そして、算出手段によって算出された特徴量に基づいて、運転支援を行う。加速特性を表わす特徴量を算出して、運転支援を行なうことにより、運転者の加速操作の特性を考慮した適切な運転支援を行なうことができる。
(もっと読む)
加速度制御装置
【課題】運転者の感覚にあった加速制御を簡易に行うことができる加速度制御装置を提供する。
【解決手段】速度2乗微分と環境因子αenvとの積が加速感覚値εとなることを示す式を変形することによって得られる目標加速度算出式を記憶しておく。そして、周辺環境監視装置106によって車両前方において車両周辺に存在する周辺物体12を実際に検出し、環境因子算出部110は、その検出した周辺物体12の位置を用いてから環境因子αenvを算出する。目標加速度生成部114は、環境因子αenvを用いて目標加速度算出式から目標加速度arefを逐次生成する。これによって、運転者の感覚にあった加速を行うことができ、しかも、事前に加速曲線を調整しておく必要がないことから、簡易に制御を行うことができる。
(もっと読む)
1 - 20 / 37
[ Back to top ]