
Fターム[3D246EA06]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 推進装置 (1,150) | 電動モータ(回生作用を行うものを含む) (355) | インホイールモータ (34)
Fターム[3D246EA06]に分類される特許
1 - 20 / 34
電気自動車
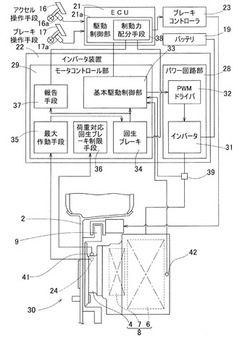
【課題】 可能な限り回生ブレーキを使用し、かつ回生ブレーキの掛け過ぎによるタイヤのスリップを防止できる電気自動車を提供する。
【解決手段】 回生ブレーキ34と、機械式ブレーキ9とを備えた電気自動車において、車輪用軸受4に、路面・タイヤ間に作用する車両進行方向の荷重を検出する荷重センサ41を設けると共に、荷重対応回生ブレーキ制限手段36を設ける。この荷重対応回生ブレーキ制限手段36は、荷重センサ41の出力が設定値に達したときに、回生ブレーキ34の制動トルクを減じる。また、車輪回転数とバッテリの充電状態から回生ブレーキ34の可能最大回生制動トルクを計算し、指令範囲内で回生ブレーキ34の制動トルクを最大に作動させる最大作動手段36を設ける。
(もっと読む)
電気自動車

【課題】 左右の車輪を個別に駆動する複数のモータを備えた電気自動車において、1輪分のモータ異常が発生した場合に、停止させることなく、車両姿勢の安定化を図って走行を可能とする。
【解決手段】 各モータ6の異常を検出するモータ異常検出手段37と、片側異常時対応制御手段38とを設ける。片側異常時対応制御手段38は、モータ異常検出手段37により、車両の同じ前後方向位置にある左右のいずれか一方の車輪2,3のモータ6にモータ停止以外の異常が検出された場合に、同じ前後方向位置にある他方の車輪2,3のモータ6を、異常の検出されたモータ6の動作状態と同じ動作状態に近づくように制御する。この制御は、他方のモータ6のトルクを強制的に減じる制御、回生ブレーキとして作用させる制御、他方の車輪2,3のブレーキ作動の制御等とする。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
電気自動車
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
車両の制駆動力制御装置
【課題】駆動輪の制駆動力を制御して車両を適切に走行させるとともに車体に発生する複数の挙動を同時に制御する車両の制駆動力制御装置を提供すること。
【解決手段】電子制御ユニットにおいては、入力部41がセンサ31,32,33から各検出値を入力し、車体挙動制御指令値演算部42が目標前後駆動力FX、目標ロールモーメントMx、目標ピッチモーメントMyおよび目標ヨーモーメントMzを演算する。そして、駆動力配分演算部43は駆動力FX、モーメントMx,My,Mzを同時に実現するように配分して各輪に発生させる左前駆動力Ffl、右前駆動力Ffr、左後駆動力Frlおよび右後駆動力Frrを演算する。さらに、各輪モータトルク指令値演算部44は演算部43によって演算された駆動力Ffl,Ffr, Frl,Frrに対応して各インホイールモータ19〜22が発生すべきモータトルクTfl,Tfr,Trl,Trrを演算する。
(もっと読む)
車両の制動力制御装置
【課題】 制動時における回生電力の回収効率の向上と車輪のロック状態の早期の回復とを両立させる車両の制動力制御装置を提供すること。
【解決手段】 電子制御ユニット26は、各輪11〜14がロックする傾向を有するとき、蓄電装置20を構成するバッテリのバッテリ容量Yが小さければ左右前輪11,12に設けられたインホイールモータ15,16を回生状態により作動させてモータ制動トルクを発生させるとともに左右後輪13,14に設けられたインホイールモータ17,18を力行状態により作動させてモータ駆動トルクを発生させる。一方、ユニット26は、容量Yが大きければ前輪11,12に設けられたモータ15,16を力行状態により作動させてモータ駆動トルクを発生させるとともに後輪13,14に設けられたモータ17,18を回生状態により作動させてモータ制動トルクを発生させる。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
車両
【課題】旋回安定性を十分に高くすることができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部材と、内周面に沿って第1の係合部68が形成された固定部材58と、固定部材の径方向内方において回動自在に配設され、操舵部材の操作に伴って回動させられる回動部材59と、回動部材の外周縁に配設され、第2の係合部を備えた規制部材64,65と、操舵軸の操舵速度を検出する操舵速度検出手段と、駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有する車両であって、操舵軸の操舵速度が所定の閾値を超えた場合、第2の係合部を第1の係合部と係合させ、回動部材の回動を規制するとともに、制動を行って車速を低下させる。
(もっと読む)
車両のブレーキシステム
【課題】極力少ない電磁弁の作動によって回生協調ブレーキ制御を行うことでき、かつ、失陥時に制動力を確保可能な車両のブレーキシステムを提供すること。
【解決手段】ブレーキペダル操作によってマスタシリンダ圧を発生するタンデム型マスタシリンダと、前輪系統配管と後輪系統配管とを連通すると共に、第2マスタシリンダ室と前記後輪系統配管とを遮断する第1ポジションと、前記前輪系統配管と前記後輪系統配管とを遮断すると共に前記第2マスタシリンダ室と前記後輪系統配管とを連通する第2ポジションとを有するカットバルブと、後輪に接続され、回生力を発生可能なモータジェネレータと、液漏れ検出手段により液漏れが検出されていないときは前記カットバルブを前記第1ポジションとし、液漏れが検出されたときは前記カットバルブを前記第2ポジションに切り換えるコントローラを備えた。
(もっと読む)
車両用制動発生システム
【課題】本発明は、車両用制動発生システムに係り、電動モータ及び電動ブレーキへの電力供給を簡素な構成で実現させつつ、車両に要求される制動トルクを確実に発生させることにある。
【解決手段】車体バネ下に配置され、電力供給により車輪を駆動する駆動トルクを発生すると共に、車輪の回転により回生電力を発生する電動モータと、車体バネ下に配置され、電力供給により車輪を制動する制動トルクを発生する電動ブレーキと、車体バネ上に配置されるバッテリと電動モータとの間で授受される電力が流通する第1電力線と、電動モータから電動ブレーキへ供給される電力が流通する第2電力線と、車両の制動が要求される場合、要求制動トルクを、電動モータの回生に伴う回生制動トルクと、該電動モータの発生する回生電力の全部又は一部の第2電力線を介した供給により電動ブレーキの発生する電気制動トルクと、で発生させる制動トルク制御手段と、を備える。
(もっと読む)
運転席方向可変車両の制動装置
【課題】運転席方向可変車両の運転方向が何れ方向であっても、前後輪制動力配分が、後輪先ロック防止と、十分な車両減速度の発生とを両立させ得るものになるようにする。
【解決手段】S21で、ブレーキペダル踏み込み量Lbおよび運転席の向きを検出し、S22で、運転席の向きに応じた理想制動力配分特性に基づき目標前後制動力配分を算出する。S24で車体の走行方向一方側(A側)が車両前方となる運転方向であると判定するとき、S25において制動力配分を、S22で求めた目標制動力配分となすよう、つまりA側車輪(前輪)の制動力の方が反対側B側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。S24でB側が車両前方となる運転方向であると判定するとき、S26において制動力配分を、S22で求めた目標制動力配分となすよう、つまりB側車輪(前輪)の制動力の方がA側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。
(もっと読む)
モータ走行車両制御装置、モータ走行車両制御方法
【課題】坂路においてモータが過熱することを事前に防ぐことが可能なモータ走行車両制御装置及びモータ走行車両制御方法を提供すること。
【解決手段】駆動力の少なくとも一部を電気モータ16とする車両のモータ走行車両制御装置100であって、車速を検出する車速検出手段61と、アクセル開度を検出するアクセル開度検出手段14と、路面の傾斜を検出する傾斜検出手段13と、車速に基づいて車両の停止状態を判定する停止判定手段と、停止判定手段により停止状態であると判定され、アクセル開度が第1の閾値より大、かつ、路面の傾斜が第2の閾値より大、という条件が成立する車両状況か否かを判定する判定手段63と、車両状況の場合、車両に制動力を加える制動制御手段66と、電気モータのモータ電流を低下させるモータ電流制御手段65と、を有することを特徴とする。
(もっと読む)
車両運動制御システム
【課題】菱形車輪配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】前輪12Fと後輪12Rとの少なくとも一方を転舵させる転舵装置を制御するための制御装置が有する制御部を、左輪14Lおよび右輪14Rのいずれか一方に目標とされる駆動力と目標とされる制動力との少なくとも一方を付与できない失陥が駆制動装置に生じた場合に、その失陥に起因して生じる車両のヨーイング(ヨーモ−メントMyaw)を抑制すべく、転舵輪12F,12Rとのうちの1以上のものの転舵量を制御するように構成する。それにより、失陥に起因して生じる車両のヨーイングと逆向きのヨーモーメントを発生させ、その失陥に起因するヨーイングを低減させることが可能とされている。つまり、本車両運動制御システムによれば、上記のような駆制動装置の失陥時においても、車両の直進性を確保することが可能である。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
4輪独立駆動車両の制御装置
【課題】インホイールモータのいずれか1つにフェイルが発生し、その出力トルクが減少する状況であっても、安定した走行を継続させることが可能な4輪独立駆動車両の制御装置を提供すること。
【解決手段】駆動力源として力行機能と回生機能とを有する電動機と、摩擦力により車輪を制動するブレーキ装置とを備え、前後左右の4輪のトルクをそれぞれ独立に制御可能な4輪独立駆動車両の制御装置において、前記4輪のいずれか1輪にフェイルが生じた際に、前記電動機が力行制御される場合は、前記車両全体の総駆動トルクを制限し、前記電動機が回生制御される場合は、前記車両全体の総制動トルクを前記フェイルが生じていない通常状態に維持するフェイルセーフ手段(ステップS3,S5)を設けた。
(もっと読む)
車両用複合ブレーキの協調制御装置
【課題】摩擦制動の制御なしに、回生制動制御のみにより、車速変化に伴う制動力変化を緩和して制動フィーリングの向上を図った、複合ブレーキの協調制御装置を提案する。
【解決手段】摩擦制動装置の摩擦材を、車速低下とともに摩擦係数が初期値μからμ'へと低下する材料で造り、摩擦制動トルクTbが車速低下につれ低下されるようにし、かかる車速低下による摩擦制動トルクTbの低下分を回生制動により補償するよう回生制動トルクTcを決定する。図示のごとく、摩擦材押し付け力Fbを一定にしていることで、目標制動トルクTb*が一定値に保たれて、車速VSPが図示のように低下する場合につき説明すると、車速低下に伴う摩擦制動トルクTbの低下分ΔTb(=Tb*−Tb)を回生制動トルクTc(=ΔTb)により補償するため、両者の共働により目標制動トルクTb*を実現可能である。しかも、摩擦制動の制御が不要なため、制御が簡単で、摩擦制動トルクTbを制御するアクチュエータも不要である。
(もっと読む)
1 - 20 / 34
[ Back to top ]