
Fターム[3D246GB18]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 路面状況対応 (331) | 摩擦係数 (136)
Fターム[3D246GB18]の下位に属するFターム
Fターム[3D246GB18]に分類される特許
1 - 20 / 82
ブレーキ装置
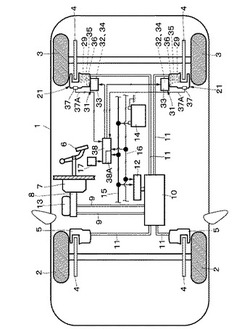
【課題】車両の駐車場所がスプリットμ路面であるか否かを判定できるブレーキ装置を提供する。
【解決手段】ディスクブレーキ21を構成する取付部材に歪センサ37を設ける。歪センサ37は、取付部材の歪に基づいて、ディスクブレーキ21のブレーキ力を検出する。駐車ブレーキ用コントローラ38は、駐車ブレーキの作動時に、左側の後輪3のディスクブレーキ21のブレーキ力と左側の後輪3のディスクブレーキ21のブレーキ力とを比較し、これら左,右のブレーキ力Bに差がある場合に、左側の後輪3と右側の後輪3とがスプリットμ路面の勾配路に駐車されていると判定する。
(もっと読む)
車両用ブレーキ液圧制御装置

【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、高摩擦係数の路面であることを精度よく判定して許容差圧を充分に大きく設定可能とする。
【解決手段】車両の推定車体減速度を推定車体減速度算出手段26が算出し、許容差圧設定手段27が、路面摩擦係数に対応した許容差圧を推定車体減速度算出手段26が算出した推定車体減速度に基づいて設定する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、路面の摩擦係数に安定して対応した許容差圧が得られるようにする。
【解決手段】制御対象の車輪と同軸上にある他の車輪の車輪ブレーキのアンチロックブレーキ制御に伴う減圧開始時の液圧であるロック液圧をロック液圧取得手段29が取得し、許容差圧設定手段27は、少なくともロック液圧取得手段29で得たロック液圧に基づいて路面摩擦係数に対応した許容差圧を設定する。
(もっと読む)
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
路面状態推定方法、及び路面状態推定装置
【課題】バネ下前後加速度と車輪速のデータとを用いて、走行中の路面の状態を精度よく推定する方法とその装置を提供する。
【解決手段】ナックル21に取付けられた加速度センサー11によりバネ下前後加速度を検出するとともに車輪速を検出して車輪速の変化量を算出した後、車輪速の変化量の変動幅とバネ下前後加速度の変動幅とを算出し、車輪速の変化量の変動幅とバネ下前後加速度の変動幅との関係から路面が凹凸のある路面であるか否かを判定し、凹凸のある路面である場合には、バネ下前後加速度を周波数分析して得られた周波数スペクトルの200Hz〜230Hz帯域内におけるピーク周波数を抽出し、このピーク周波数と、車輪速と、予め求めておいたピーク周波数と車輪速との関係を示す周波数判定式とを用いて凹凸のある路面が滑り易い路面であるか否かを推定するようにした。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ABS制御を実行する車輪の回転速度のみに基づいて、実際の路面状態に沿ったABS制御を実行することができるアンチロックブレーキ制御装置を提供する。
【解決手段】アンチロックブレーキ制御手段65は、検知された回転速度Vに基づいて算出された前輪減速度Gが第1スリップ検出閾値G1を超えることで前輪WFのロック状態を判定すると共に、乗員の操作により生じているブレーキ圧を開放制御してロック状態を解消する。ブレーキ圧の開放制御に伴って前輪WFの回転が復帰する際に発生する復帰加速度Gfに基づいて、少なくとも路面摩擦の大きさに起因すると共に自動二輪車1の停止しやすさの指標となる推定減速度Gsを導出する路面摩擦推定手段66を具備する。アンチロックブレーキ制御手段65は、推定減速度Gsに応じて目標前輪回転車速Vmを算出し、ABS制御中は回転速度Vが目標前輪回転速度Vmに収束するようにブレーキ圧を制御する。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
車両の制動力制御装置
【課題】 制動時における回生電力の回収効率の向上と車輪のロック状態の早期の回復とを両立させる車両の制動力制御装置を提供すること。
【解決手段】 電子制御ユニット26は、各輪11〜14がロックする傾向を有するとき、蓄電装置20を構成するバッテリのバッテリ容量Yが小さければ左右前輪11,12に設けられたインホイールモータ15,16を回生状態により作動させてモータ制動トルクを発生させるとともに左右後輪13,14に設けられたインホイールモータ17,18を力行状態により作動させてモータ駆動トルクを発生させる。一方、ユニット26は、容量Yが大きければ前輪11,12に設けられたモータ15,16を力行状態により作動させてモータ駆動トルクを発生させるとともに後輪13,14に設けられたモータ17,18を回生状態により作動させてモータ制動トルクを発生させる。
(もっと読む)
路面状態推定方法
【課題】走行中の雪路を更に細分化して推定することのできる路面状態推定方法を提供する。
【解決手段】加速度センサー、路面温度計、及び、マイクロフォンにより、タイヤのタイヤ周方向振動、路面温度T、及び、タイヤ発生音をそれぞれ検出するとともに、タイヤの振動のデータから、踏み込み前領域R1の帯域値P11,P12,P13と、踏み込み領域R2の帯域値P21,P22,P23と、蹴り出し前領域R3の帯域値P31,P32,P33と、蹴り出し領域R4の帯域値P41,P42と、蹴り出し後領域R5の帯域値P51,P52,P53とを算出し、タイヤ発生音のデータから低周波帯域のバンドパワー値PAと高周波帯域のバンドパワー値PBとの比である音圧レベル比Q=(PA/PB)を演算し、帯域値Pijと、路面温度Tのデータと、音圧レベル比Qと、車輪速のデータとを用いて、路面状態を推定する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による制動時、従動輪の摩擦トルクがばらついても、総制動トルクのばらつきを低減。
【解決手段】ブレーキ操作に基づく総制動トルク指令Ftotal*に対し、左右前輪の回生ブレーキによる回生トルク指令Fm*と、左右前輪および左右後輪の各摩擦ブレーキによる摩擦トルク指令Fb*を演算する回生/摩擦トルク演算部B1と、左右前輪および左右後輪の各摩擦ブレーキで実行される摩擦トルク値である摩擦トルク実行値Fbを推定演算する摩擦トルク実行値演算部B2と、摩擦トルク指令Fb*と摩擦トルク実行値Fbの偏差を、左右前輪および左右後輪の各輪分について算出し、これらの偏差を足し合わせた摩擦トルク総偏差を、回生トルク指令Fm*に加える回生トルク補正値Fm_addとして出力する回生トルク補正値/摩擦トルク補正値演算部B5と、を備えた。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
路面摩擦係数推定装置
【課題】自動車の旋回時におけるタイヤと路面との摩擦係数を、シミュレーションを用いずにリアルタイムで推定することができるとともに、大型の専用車両が必要とせずに簡便な装置とすることが可能であり、更に走行中に運転者の意図しない駆動が行われることがない路面摩擦係数推定装置を提供すること。
【解決手段】自動車の左右のタイヤの回転数を測定する回転数測定手段と、自動車の進行方向を測定する進行方向測定手段と、前記タイヤの実舵角を測定する実舵角測定手段と、自動車の向きを測定する方角測定手段と、前記回転数測定手段、進行方向測定手段、実舵角測定手段、方角測定手段の各測定値に基づいてタイヤと路面の旋回時における摩擦係数を推定する推定手段とを備えていることを特徴とする路面摩擦係数推定装置とする。
(もっと読む)
走行支援装置、方法およびプログラム
【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】路面摩擦係数に応じた適切な減圧量で減圧制御を行い、ブレーキフィーリングを向上させる。
【解決手段】車両用ブレーキ液圧制御装置は、常開型電磁弁および常閉型電磁弁を制御することで、車輪ブレーキ内の液圧を増減する制御を行う制御手段(制御部20)を備える。制御手段は、車輪速度が減少中で減圧制御することを決定した場合において、基本減圧制御(基本減圧制御部251)と漸減圧制御(漸減圧制御部252)とを続けて行う減圧サイクルで減圧を行い、基本減圧制御においては、基本減圧量で減圧制御を行い、漸減圧制御においては、所定時間、液圧を保持する一時保持制御(一時保持制御部252A)と、当該一時保持制御の後、車輪速度が減少傾向にある場合には、基本減圧量より小さい量の減圧を実行する微小減圧制御(微小減圧制御部252B)とを行う。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ABS制御中に車両挙動制御を実行する場合に、ブレーキ液圧の急変を抑制し、ブレーキフィーリングを向上させることを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車両の旋回状態に基づいて制御対象車輪を加圧するのに必要な加圧液圧を算出する加圧液圧算出部121Aと、車両の旋回による横加速度を取得し、当該横加速度に基づいて制御対象車輪が存在する前後位置における左右の車輪に掛かる荷重比を算出する荷重比算出部121Bと、車両挙動制御の制御対象車輪と前後位置が同じで左右逆側の車輪の推定液圧を制御対象車輪の基本液圧とし、当該基本液圧を荷重比で補正した修正基本液圧を算出する修正基本液圧算出部121Cとを備え、アンチロックブレーキ制御中に車両挙動制御を実行する際には、修正基本液圧に加圧液圧を加算することで、目標液圧を算出するように構成される。
(もっと読む)
車両制動装置
【課題】 制動距離を抑制することができる車両制動装置を提供すること。
【解決手段】 前後加速度と推定した摩擦係数とに基づいて目標ホイルシリンダ液圧を算出する目標ホイルシリンダ液圧算出手段と、車輪がロックしそうなときにホイルシリンダ液圧を減圧し、ホイルシリンダ液圧の減圧後に、目標ホイルシリンダ液圧となるようにホイルシリンダ液圧を増圧し、ホイルシリンダ液圧の増圧後に、目標スリップ率となるようにホイルシリンダ液圧を増減圧するホイルシリンダ液圧制御手段とを設けた。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
車両制御装置
【課題】 スムーズな発進を行うことができる車両制御装置を提供する。
【解決手段】 ドライバのブレーキペダル操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCUと、エンジン32の駆動力を前輪FL,FRと後輪RL,RRとに対して任意の割合で配分可能な4WDカップリング39と、所定の条件が成立したとき、後輪RL,RRへの駆動力配分量を増加させる駆動力配分変更部33cと、を備えた。
(もっと読む)
1 - 20 / 82
[ Back to top ]