
Fターム[3D246GB20]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 路面状況対応 (331) | 摩擦係数 (136) | 左右方向 (34)
Fターム[3D246GB20]に分類される特許
1 - 20 / 34
車両用制動力制御装置
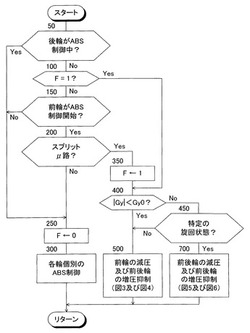
【課題】車両がスプリットμ路を走行する際の前一輪のアンチスキッド制御に起因して車両に作用する余分なヨーモーメントを低減しつつ、従来の制動力制御装置の場合に比して後輪の横力が不足する虞れを低減する。
【解決手段】必要に応じて各車輪の制動力を相互に独立に制御可能な制動装置を有する車両用制動力制御装置に係る。一方の前輪に於いてアンチスキッド制御が開始され(ステップ150)、左右の路面の摩擦係数が異なる走行路に関し予め設定された条件が成立していると判定されると(ステップ200)、一方の前輪とは左右反対側の前輪の制動力の増大を抑制すると共に、左右の後輪のうち少なくとも一方の前輪とは左右反対側の後輪の制動力の増大を抑制する(ステップ500又は700)。一方の前輪とは左右反対側の前輪の制動力の増大抑制度合は後輪の制動力の増大の抑制が行われない場合の抑制度合に比して小さい。
(もっと読む)
アンチスキッド制御装置

【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
車両用ブレーキ圧制御装置
【課題】車両に大きなヨーレートが発生するのを抑制することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ圧制御装置は、低摩擦側ブレーキ圧と許容差圧とに基づいて高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標圧を算出する機能(目標圧設定手段52C)を備えるとともに、高摩擦側ブレーキ圧の目標圧の変化量を制限するための制限値を算出する制限値算出手段52Dと、目標圧と制限値から目標圧の変化量を制限した制限目標圧を算出する制限目標圧算出手段52Eと、制限目標圧に基づいて高摩擦側ブレーキ圧を制御する高摩擦側ブレーキ圧制御手段52Fを備える。
(もっと読む)
車両用ブレーキ圧制御装置
【課題】旋回時において旋回外輪の制動力を効率よく発揮することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ圧制御装置は、左右輪の許容差圧を設定する許容差圧設定手段と、許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、高摩擦側ブレーキ圧を目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段を備える。許容差圧設定手段は、車体速度(第1マップM1)に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧は常に0よりも大きな値になっている。
(もっと読む)
車両運動制御装置
【課題】スプリット路面での車両の不安定性を応答性良く改善でき、ドライバによる修正操舵の振幅を一定範囲内に維持して行えるようにする。
【解決手段】ABS制御の制御モードとして増圧モードが設定されているときに、スプリット制御として、車両の安定性の指標となる舵角偏差driftvalueの絶対値|driftvalue|の大きさに基づいて、高μ路側の前輪に対するABS制御における増圧制御の増圧勾配に制限をかける。これにより、舵角偏差driftvalueに応じて応答性良く高μ路側の車輪の制動力の増加勾配を抑制できる。このため、左右輪間での制動力差を抑制することが可能になり、これに起因するヨーモーメントを抑制できると共に、スプリット路面での車両の不安定性を応答性良く改善できる。また、ヨーモーメントを打ち消すようなドライバによる修正操舵も軽減することができ、ドライバによる修正操舵の振幅を一定範囲内に維持して行うことが可能となる。
(もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
ブレーキ制御装置
【課題】増圧制御弁の個体差による昇圧性能バラツキに起因して、所望の制動力が得られなくなることを抑制する。
【解決手段】高μ路側の前輪FR、FLと対応する増圧制御弁17、37にて第1差圧Plowを第1時間Tlow継続し、第2差圧Phighを第2時間Thigh継続することを繰り返すことで、高μ路側の車輪のW/C圧を緩増圧する。したがって、W/C圧の昇圧性能のばらつきを抑制することができ、左右前輪FR、FLのW/C圧の差圧を一定範囲に抑えることが可能になる。これにより、車両に加わるヨートルクを抑制でき、スピンを防止することが可能になる。そして、第1差圧Plowを一定値にせずに、段階的に徐々に低下させていくことで、第1、第3増圧制御弁17、37の個体差に起因した発生させられる差圧のばらつきを緩増圧中に更に低減することができる。
(もっと読む)
車両用転舵制御装置および車両用転舵制御方法
【課題】ブレーキ液圧の変動によらず、転舵対象車輪の車輪転舵角を安定性を良くすることのできる車両用転舵制御装置および車両用転舵制御方法を提供する。
【解決手段】ブレーキ液圧補正演算部61は、ブレーキ液圧が上昇している場合において、ブレーキ液圧が減少したときにブレーキ液圧を増加させて補正したブレーキ液圧補正値を出力する。そして、路面摩擦係数推定部63は、このブレーキ液圧補正値に基づいて路面摩擦係数を推定する。これにより、操舵制御量が安定化しスプリットμ路における運転者による修正操舵を容易にする。
(もっと読む)
車両制動装置
【課題】路面状況により適切に対応させて部分的なハイドロプレーニング現象を検出することができる車両制動装置を提供すること。
【解決手段】本発明による車両制動装置1は、スリップ率が目標スリップ率よりも大きい場合に各車輪に対応するホイールシリンダ内の油圧を減圧するロック状態抑制手段7bと、各車輪に対応する各ホイールシリンダ内の油圧を検出して、左右何れかの後輪に対応するホイールシリンダ内の油圧が第一所定値β以上の高油圧域であり、当該高油圧域である当該ホイールシリンダに対応する後輪に対して左右方向の位置関係が一致しかつ前側に位置する前輪に対応するホイールシリンダ内の油圧が第二所定値γ未満の低油圧域であって、ロック状態抑制手段7bが油圧を減圧している場合に、当該前輪にハイドロプレーニング現象が発生していると判定する判定手段7cを備えることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】車両挙動の安定性の制御と、運転者の負担軽減のための制御との間で、調和をとって車両挙動の安定性を良好とする電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置を制御するECUのEPS制御部は、操舵トルクTSと車速VSにもとづいて操舵補助力を出力するように制御するベース電流算出部31の他に、車両挙動の安定性向上のアクティブ制御をする第1制御部を構成するハンドル戻し制御部32、アンダステア制御部33、オーバステア制御部34、ヨーレート反力制御部35、及びスプリットμ制御部36と、運転者のハンドル操作の負担を軽減するための制御をする第2制御部を構成する外乱抑制制御部37、車体流れ制御部38を含んでいる。そして、第1制御部が作動している場合には、第2制御部の出力のゲインを第1制御部の出力が所定値以上でゼロとする。
(もっと読む)
障害物回避支援装置
【課題】障害物回避性能の更なる向上を図ることができる障害物回避支援装置を提供する。
【解決手段】障害物回避支援装置は、車輪の制動力を制御することによりアンダーステアを抑制するアンダーステア抑制制御部23と、車輪の制動力を制御することによりオーバーステアを抑制するオーバーステア抑制制御部22とを有する制動力制御装置1と、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援する回避操作支援制御部42を有する電動パワーステアリング装置2と、を備える。回避操作支援制御部42が、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援するように作動しているときには、アンダーステア抑制制御部23のゲインを通常時よりも高くし、オーバーステア抑制制御部22のゲインを通常時よりも低くする。
(もっと読む)
車両挙動制御装置
【課題】 制動時における望ましくない車体挙動を抑制するための車両挙動制御装置を提供する。
【解決手段】 ステップS4でスピンモーメントMsの算出を終えると、VSA−ECU31は、ステップS5で、式(4),(5)が満たされるように、前輪3fl,3frの目標前輪舵角δftと後輪3rl,3rrの目標後輪トー角Trtとを設定した後、ステップS6でこれらを操舵ECU32に出力する。これにより、μスプリット路51での制動時であっても、自動車1の車体2にはヨーモーメントも横力も作用せず、直進状態を維持したまま減速あるいは停止できるようになる。
fl・Ffb=−(fl・Ffs+fr・Frs)・・・(4)
Ffs=−Frs・・・(5)
(もっと読む)
回転速度制御装置
【課題】またぎ登坂路を走行中に、回転速度差を良好に抑制可能とする。
【解決手段】左側駆動輪と右側駆動輪との間の回転速度差が開始しきい値以上になると、回転速度が大きい方の車輪の液圧ブレーキを作動させて、駆動スリップを小さくして、回転速度差を低減するブレーキLSD制御が行われる。この場合において、車両が上り坂を走行している場合(S2がYES)には、開始しきい値がそうでない場合より、小さい値とされる(S4)。またぎ登坂路の走行中において、ブレーキLSD制御が早期に開始されることになるのであり、その結果、ブレーキLSD制御において、ブレーキ力の増加勾配が小さくなるため、作動音を小さくしたり、振動を小さくしたりすることができる。
(もっと読む)
アンチロック制御装置
【課題】適切なブレーキトルクを車輪に付与する。
【解決手段】アンチロック制御装置10は、増大モードとして、第1増大モードと該第1増大モードよりも小さいブレーキトルクを付与する第2増大モードとを有し、ブレーキ装置により車輪に実際に付与されるブレーキトルクを検知または演算して取得すると共に、増大モードの実行時に目標ブレーキトルクを演算する目標トルク演算部57を備え、増大モードの実行時に目標ブレーキトルクと実際のブレーキトルクとの偏差(ブレーキトルク偏差(Tt−T))が所定値以上の場合に、第1増大モードによりブレーキトルクを増大させ、ブレーキトルク偏差(Tt−T)が所定値未満の場合に、第2増大モードによりブレーキトルクを増大させる。
(もっと読む)
車両運動制御システム
【課題】左右の駆動輪の車輪速度差が大きくなり易い状況下にて駆動力配分制御によるトラクション制御が行われるときに、駆動力配分制御の耐久性の悪化を抑制できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システムは、左右の車輪に駆動力を付与すると共に左右の車輪への駆動力配分を制御(駆動力配分制御)できる駆動力配分制御装置と、左右の車輪の制動力を独立して制御(制動力制御)できる制動力制御装置とを備える。また、車輪のスリップを抑制するためのトラクション制御が行われる。また、この車両運動制御システムは、車輪の現在位置における路面の摩擦係数に関する情報(路面μ情報)を取得する路面μ情報取得手段を備える。そして、路面μ情報に基づきアクセル開度の上限値が設定されると共に、現在のアクセル開度が上限値以下のときにのみ駆動力配分制御によるトラクション制御が行われる。
(もっと読む)
車両運動制御システム
【課題】左右の駆動輪の車輪速度差が大きくなり易い状況下にて駆動力配分制御によるトラクション制御が行われるときに、駆動力配分制御の耐久性の悪化を抑制できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、左右の駆動輪11RR、11RLに駆動力を付与すると共に左右の駆動輪11RR、11RLへの駆動力配分を制御できる駆動力配分制御装置2と、各駆動輪11RR、11RLの制動力を独立して制御できる制動力制御装置3とを備える。この車両運動制御システム1では、駆動輪11RR、11RLのスリップを抑制するためのトラクション制御が行われる。また、左右の駆動輪11RR、11RLの車輪速度差が所定の閾値以下のときに、駆動力配分制御によるトラクション制御が行われる。
(もっと読む)
車両挙動制御装置
【課題】スプリットμ路における制動において低μ側の車輪の制動力を最大限に活用しつつ車両の制動距離を低減する車両挙動制御装置を提供する。
【解決手段】左右後輪2L,2Rのトー角を各々独立して制御する後輪トー角制御装置を備えた車両挙動制御装置であって、後輪トー角制御装置は、車両の制動時において後輪軸上の左右後輪2L,2Rの路面との摩擦係数の差を検出したとき、高い摩擦係数側の後輪のみトーアウト側に向きを変えるように制御することを特徴とする。
(もっと読む)
1 - 20 / 34
[ Back to top ]