
Fターム[3D246GB36]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | レーンキープ (113)
Fターム[3D246GB36]に分類される特許
61 - 80 / 113
車線逸脱防止装置及びその方法
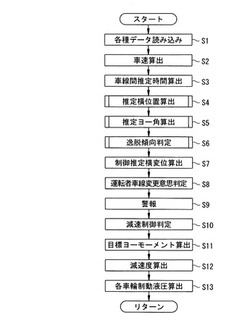
【課題】車線区分線を推定する場合でも、適切なヨーモーメントの大きさにする。
【解決手段】車線逸脱防止装置は、車線区分線検出手段により車線区分線の検出精度が低下している場合、推定した車線区分線を基に、走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行い(ステップS11、ステップS12)、車線区分線の検出精度が低下している時間に応じて、車線逸脱防止制御の制御量を小さくする補正をする(ステップS3〜ステップS5)。
(もっと読む)
車線逸脱防止装置及び車線逸脱防止方法

【課題】運転者の操舵操作の意図と走行制御とを合致する。
【解決手段】走行車線に対する自車両の逸脱傾向が発生していると判定した場合、走行車線から自車両が逸脱することを回避する車線逸脱防止制御を開始する。ただし、車線逸脱防止制御を行っている際に、運転者による逸脱傾向を強める方向への操舵入力を検出した場合、該車線逸脱防止制御を抑制する。この場合、車線逸脱防止制御を開始してからの経過時間が長くなるほど、前記車線逸脱防止制御を抑制する度合いを大きくする。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方物体の側に横移動するときの走行車線に対する横速度Vxを検出し(ステップS6)、この横速度Vxが速いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、横速度Vxが速いほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS11)。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】自車両側方の障害物の存在に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、障害物を検出するレーダ装置14L,14Rが走行車線に対して逸脱傾向が発生している方向で自車両の側方に位置する障害物を検出した場合(ステップS24)、切増し操作量判定用しきい値δovr_endを大きくすることで、運転者の操舵操作に対する車線逸脱防止制御の作動の抑制をしない方向に補正をする(ステップS25)。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、走行車線に対する自車両の現在横位置Xeを検出し(ステップS6)、この現在横位置Xeが側方物体に近いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、現在横位置Xeが側方物体に近づくほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS8)。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】運転者による車線変更の行動に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、障害物を検出するレーダ装置14L,14Rが走行車線に対して逸脱傾向が発生している方向で自車両の側方に位置する障害物を検出した場合(ステップS24)、該障害物の前方への自車両の割り込み易さ度合いが低くなるほど、切増し操作量判定用しきい値δovr_endを大きくすることで、運転者の操舵操作に対する車線逸脱防止制御の作動の抑制をしない方向に補正をする(ステップS25)。
(もっと読む)
走行支援装置
【課題】レーンマーカ等の道路情報を検出できない道路でも該道路情報を検出できる道路でも、周辺車両との接触の危険性を判断し、適切なタイミングで適切な対処を行う衝突防止支援装置を提供すること。
【解決手段】自車両と周辺に存在する周辺走行車両を検出する第1のセンサと、道路上のレーンマーカを検出する第2のセンサと、前記自車両と前記周辺走行車両との位置関係を算出する第1の算出部と、前記位置関係に基づいて、前記周辺走行車両が前記自車両に衝突する確率の分布を示す危険度を算出する第2の算出部と、前記危険度に基づいて、制御閾値を設定する設定部と、前記第2のセンサが前記レーンマーカを検出していない場合は、自車両と周辺走行車両との位置関係に基づいて制御閾値を設定し、前記第2のセンサが前記レーンマーカを検出している場合には、当該レーンマーカ及び前記位置関係に基づいて前記制御閾値を設定する設定部を備えること。
(もっと読む)
運転支援装置
【課題】カーブ進入時における運転者の違和感を軽減した運転支援装置を提供する。
【解決手段】車両の運転を操舵トルクの付与により支援する運転支援装置において、車速検出手段120と、操舵角、ヨーレート、求心加速度の少なくとも1つを検出する操舵実際値検出手段130と、カーブの曲率を取得するカーブ曲率取得手段110と、操舵目標値を算出する操舵目標値算出手段160と、操舵機構10へ操舵トルクを付与する操舵制御を実行する操舵制御手段170と、操舵目標値と操舵実際値に基づいて操舵制御の実行を予測する操舵制御予測手段180と、操舵制御の実行が予測される時に操舵制御の実行に先立って第1の減速制御を実行する第1の減速制御手段180とを備える構成とする。
(もっと読む)
運転支援装置、運転支援方法
【課題】意識低下状態から覚醒状態に復帰した場合でも、車両挙動を安定化させることができる運転支援装置及び運転支援方法を提供すること。
【解決手段】運転者の覚醒度に応じて運転者を支援する運転支援装置100において、運転者が意識低下状態から覚醒した直後か否かに応じて、運転者を支援する車両制御の態様を可変にする、ことを特徴とする。
(もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
車線逸脱防止装置、及び車線逸脱防止方法
【課題】自車進路を修正するときに、運転者に不必要な減速感を与えないようにする。
【解決手段】目標ヨーモーメントMsを算出した際、この目標ヨーモーメントMsに応じて自車進路を修正した場合の車両に作用する推定横加速度GH及び推定減速度GTを予め推定し、推定横加速度GHが推定減速度GTより小さいときには、目標ヨーモーメントMsを、車速Vに応じて、より小さな制限値Msmに補正する。
(もっと読む)
車両の車線逸脱警報装置
【課題】車両の車線逸脱警報装置において、自車両の走行車線と隣接する隣接車線における自車両前方に他車両を検知した場合、早期に警報を行う。
【解決手段】車両の走行車線を認識する車線認識部7bと、車両の予想進路を推定する進路推定部7eと、車線認識部7bにより認識された走行車線と略平行に延びるように設定された判定ラインと進路推定部7eにより推定された進路とに基づいて、車両の走行車線からの逸脱を判定する車線逸脱判定部7fと、車線逸脱判定部7fにより逸脱と判定されたときに警報を行う第1警報ブザー11とを備える装置である。装置は、隣接車線における車両前方の他車両を検知する他車両検知部7cと、他車両検知部7cにより他車両が検知されていないときに、判定ラインとして第1判定ラインを設定する一方、他車両検知部7cにより他車両が検知されたときに、判定ラインとして第2判定ラインを設定する判定ライン設定部7dとを備える。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線Lの幅方向中央からそれぞれ幅方向左右に横変位基準位置LXL、LXRを設ける。そして少なくとも左右の横変位基準位置LXL、LXR以内に自車両が位置する場合、ヨー角偏差が小さくなるように自車両をフィードバック制御する。また、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外に自車両がいる場合、上記角度偏差および横変位偏差が小さくなるようにフィードバック制御する。
(もっと読む)
車両の運転支援装置
【課題】路側の状況に応じて自車両の走行制御を行う。
【解決手段】車両の運転支援装置は、自車両Cの走行路内における走行位置を検出する走行位置検出部1cと、走行路の路側の情報を取得する路側情報取得部1eと、自車両Cが走行する基準ラインLfを算出する通常時基準ライン算出部1d及び通常時基準ライン補正部1jと、基準ラインLfと走行位置検出部1cによって検出される自車両Cの走行位置とに基づいて、自車両Cが基準ラインLfに沿って走行するように走行制御する操舵制御部1kとを備えている。通常時基準ライン算出部1d及び通常時基準ライン補正部1jは、路側情報取得部1eの結果に応じて基準ラインLfを算出する。
(もっと読む)
車両走行支援装置、車両、車両走行支援プログラム
【課題】車両が走行領域から逸脱することを回避する観点から車両の挙動を適当に制御することができる装置等を提供する。
【解決手段】本発明の車両走行支援装置10によれば、運転操作度合Ddが閾値TH_Dd以下となったことを要件として走行支援制御が実行される。これにより、操舵装置14および制動装置16のうち一方または両方の動作が制御されることにより、車両1が走行領域から逸脱しないように車両1の走行が支援される。
(もっと読む)
車両の運転支援装置
【課題】運転者固有の運転特性に応じた走行制御を行う。
【解決手段】運転支援装置は、走行路内における走行位置を検出する走行位置検出部1bと、基準ラインを走行路に応じて算出する通常時基準ライン算出部1cと、自車両Cが基準ラインに沿って走行するように走行制御を行う操舵制御部1dと、走行制御が行われていないときに、自車両Cの走行路上の走行軌跡を走行路の道路状況と併せて記憶する記憶部1hと、記憶部1hに記憶された走行路上の走行軌跡及び走行路の道路状況に基づいて、所定の道路状況ごとの、基準ラインに対する走行軌跡のオフセット率を抽出するオフセット率抽出部1iと、通常時基準ライン算出部1cによって走行路に応じて算出された基準ラインを、オフセット率抽出部1iによって抽出された道路状況ごとのオフセット率に基づいて、走行路の道路状況に応じてオフセットさせる通常時基準ライン補正部1kとを備えている。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止のために付与する逸脱防止操舵トルクが運転者に違和感を与えてしまうことを防止する。
【解決手段】車線逸脱防止装置は、運転者の操舵トルクの入力方向と逸脱防止操舵トルクの付与方向とが、転舵輪の転舵方向で一致する場合(ステップS3又はステップS8で“Yes”の判定の場合)、該逸脱防止操舵トルクの付与を制限する(ステップS5)。
(もっと読む)
車両走行支援装置、車両、車両走行支援プログラム
【課題】左側および右側レーンマークにより走行領域の左右両側が画定されるのが不適当な状況においても、車両の安定な走行を支援する観点から操舵装置等の動作を適当に制御することができる装置等を提供する。
【解決手段】本発明の車両走行支援装置10によれば、第1条件が満たされている場合、すなわち、左側および右側レーンマークの道路幅方向の間隔が車両から遠くなるにつれて徐々に広がることにより、走行領域の画定の観点から不適当な程度に広がっている場合に仮想走行領域が走行領域として設定されうる。「仮想走行領域」とは、左側および右側レーンマークのうち車両の走行予定道路に沿って伸びている「基準レーンマーク」により一方側が画定され、かつ、この走行予定道路の幅方向について基準レーンマークから離れている「仮想レーンマーク」により他方側が画定される領域を意味している。そして、車両が走行領域としての仮想走行領域から外れないように操舵装置14等の動作が制御される。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】コンプライアンスステアによるトー角変化を抑制して、自車両の走行車線からの逸脱を防止するために必要な目標ヨーモーメントを適切に得る。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向を判定する車線逸脱傾向判定手段(ステップS3、ステップS4)と、車線逸脱傾向判定手段が逸脱傾向があると判定した場合に、車輪の制動力を制御して、左右輪に制動力差を発生させることで車両にヨーモーメントを付与する制動力制御手段(ステップS13、ステップS14)と、車輪に制動力を発生させる際に生じるコンプライアンスステアによるトー角変化を基に、制動力制御手段が車輪に発生させる制動力を補正するコンプライアンスステア用補正手段(ステップS10)と、を備える。
(もっと読む)
車両走行支援装置、車両、車両走行支援プログラム
【課題】レーンマークの種類に鑑みて車両の走行を適当に支援するように操舵装置等の動作を制御することができる装置等を提供する。
【解決手段】本発明の車両走行支援装置10によれば、レーンマークの種類に応じて、操舵装置14および制動装置16のうち一方または両方の動作の制御度合が調節される。たとえば、レーンマークが追い越し禁止またははみ出し禁止等を意味している場合は制御度合が高く設定される。これにより、車両が当該レーンマークを可能な限り越えないように操舵装置等の動作が比較的積極的にまたは強めに制御されうる。その一方、レーンマークが追い越し可能またははみ出し可能等を意味している場合は制御度合が低く設定される。これにより、車両が当該レーンマークを必要に応じて容易に越えることができるように操舵装置等の動作が比較的消極的にまたは弱めに制御されうる。
(もっと読む)
61 - 80 / 113
[ Back to top ]