
Fターム[3D246GB36]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | レーンキープ (113)
Fターム[3D246GB36]に分類される特許
21 - 40 / 113
車両制御装置
【課題】 ヨーモーメントを低減しても自車両が走行路外に逸脱することを抑制できる車両制御装置を提供する。
【解決手段】 自車両の後方車両を検出する後方車両検出部(17)を備え、ヨーモーメント指令値補正部(16)は、後方車両が検出されている場合に、車線逸脱傾向が有ると判断した場合には、車線逸脱防止ヨーモーメントの大きさ又は作動時間を調整して、当該車線逸脱防止ヨーモーメントの制御量を後方車両が検出されていない場合に比して低減し、車線逸脱防止ヨーモーメントの制御量を低減した後に、路外逸脱傾向が有ると判断した場合には、路外逸脱防止ヨーモーメントの大きさ又は作動時間を調整して、当該路外逸脱防止ヨーモーメントの制御量を増大する。
(もっと読む)
車両制御装置

【課題】車線逸脱防止制御が終了したときであっても、自車両の走行路外への逸脱を抑制する。
【解決手段】車線逸脱判断部14によって車線逸脱傾向が有ると判定された場合に、ヨーモーメント指令値算出部15によって車線逸脱防止ヨーモーメント及び路外逸脱防止ヨーモーメントを演算し、車線逸脱防止ヨーモーメントを付与する。車線逸脱防止制御終了判断部16は、車線逸脱防止ヨーモーメントの付与開始から所定時間を経過した場合、自車両の運転者によって運転操作の入力が有った場合、又は、自車両のヨー角が所定値以下となった場合の何れかの場合に、当該車線逸脱防止ヨーモーメントの付与を終了する。ヨーモーメント指令値補正部17は、車線逸脱防止ヨーモーメントの付与を終了した時刻から、路外逸脱傾向が有ると判断した時刻までの時間が長いほど、路外逸脱防止ヨーモーメントを小さく補正する。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
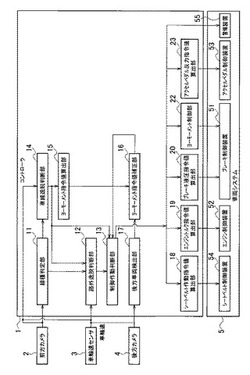
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】特に新たな機構等を設けることなく、不要な減速感による走行フィーリングの悪化を招くことがなく、路外逸脱防止のためのヨーモーメントを適切に発生する。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、交差角αと第1の逸脱量yLと第2の逸脱量ySに応じて障害物や白線に対する車両の逸脱を防止するのに必要な必要モーメントMを算出し、この必要モーメントMに応じてトルクアップ基準値Tsを設定し、車速V0に応じて設定するトルクアップ補正ゲインGtで補正してトルクアップ量ΔTを求め、エンジン制御装置11に出力する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】どのような車線逸脱量にも対応でき、ポンプモータの作動を必要最低限にして、作動音や振動の発生を抑制し、長寿命化を図る。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、車速V0と、交差角αからのハンドル角θHの差と、第1の逸脱量yLとに応じてポンプモータ目標回転数設定用逸脱度Kを設定し、該ポンプモータ目標回転数設定用逸脱度Kに応じてブレーキ制御装置10のハイドロリックユニットのポンプモータの目標回転数Rpを設定し、ブレーキ制御装置10に出力してポンプモータの回転数を可変制御する。
(もっと読む)
車両制御装置および車両制御方法
【課題】 運転者に与える違和感を軽減できる車両制御装置および車両制御方法を提供する。
【解決手段】 自車両の走行車線からの逸脱傾向を算出する逸脱傾向算出部20と、逸脱傾向算出部20によって車両の走行車線からの逸脱傾向を検出したときに車両に対してヨーモーメントおよび/または減速度を付与して逸脱傾向を抑制する車線逸脱防止制御部21と、を備え、逸脱傾向算出部20は、曲線路の外側または内側への逸脱傾向を算出し、車線逸脱防止制御部21は、算出された逸脱傾向が外側への逸脱傾向である場合には車線逸脱傾向を抑制し、算出された逸脱傾向が内側への逸脱傾向である場合には逸脱傾向の状態に基づいて車線逸脱傾向の抑制または抑制の制限をする。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
ブレーキ制御装置
【課題】 減圧時における減圧弁の作動頻度を低減できるブレーキ制御装置を提供する。
【解決手段】 ブレーキECU102は、同一配管系の2つのホイルシリンダW/Cに対する液圧指令値Pwcomにおいて、一方の液圧指令値Pwcomが他方の液圧指令値Pwcomよりも低く、低圧側のホイルシリンダW/Cの液圧指令値Pwcomが減圧指令である場合に、一方のソレノイドインバルブ4とソレノイドアウトバルブ5を共に閉じて低圧側のホイルシリンダW/Cの液圧を保持するよう液圧制御を行い、その後2つの液圧指令値Pwcomが略同一となったとき、ソレノイドインバルブ4を開弁する。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両制御装置
【課題】ドライバの走行特性に合致した逸脱判定を行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1では、走行軌跡情報取得センサ2によって、車両10と該車両10の一側方側における認識可能な白線Lとの間の距離Xが検出される。そして、ECU5により、距離Xの平均値μ及び分散値σに基づいて、車両10が一側方側と反対の他側方側に移動した際の車両10の逸脱判定が行われる。これにより、車両制御装置1によれば、ドライバの走行軌跡の特徴を逸脱判定に好適に反映させることができる。
(もっと読む)
走行路逸脱防止装置及びそれを備えた車両
【課題】走行路逸脱防止制御において、運転者の操作意図がない状態で車両の走行路逸脱を防止するためアクチュエータが作動した場合に、運転者の操作意図があると誤判断して逸脱防止制御が中断することを防止すること。
【解決手段】各センサやカメラ等の検出手段の結果に基づいて走行路外への逸脱防止制御を行う逸脱防止制御手段と、運転者の操舵意図を判定する運転意思判定手段と、運転意思判定手段からの運転者の操舵意図に基づいてアクチュエータの作動を規制するアクチュエータ作動規制手段とを有し、運転意思判定手段は、検知した操舵トルクの変化量ΔTh及び操舵アクチュエータへの制御指令値の変化量ΔTsとを算出し|ΔTh|−|ΔTs|が閾値以上の場合に運転者の操作意図があると判断して逸脱防止制御の作動を制限する。
(もっと読む)
車両制御装置
【課題】自動制御運転の不可能な道路で自動制御運転で運転を行うのを防止することができる車両制御装置を提供する。
【解決手段】車両制御装置1は、車両の現在地を検出し、位置検出精度が所定値以下である地点を識別する特定情報を取得し、特定情報が付与されている地点が有ることを取得したとき、自動制御運転を回避すべき処理を実行するナビゲーション装置3と、検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う制御装置2とを備える。
(もっと読む)
路外逸脱防止装置
【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
車両運動制御装置及び車両運動制御プログラム
【課題】簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を導出する。
【解決手段】記憶された自車両と目標位置との間の距離のx成分Xeとy成分Yeとの比で定めた第1のパラメータ、自車両の速度のx成分vx0とy成分vy0との比で定めた第2のパラメータ、及び目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を求めるために導入した第1の導入パラメータν1の関係を定めた第1のマップ、第1のパラメータ、第2のパラメータ、及び第2の導入パラメータν2の関係を定めた第2のマップ、並びに第1のパラメータ、第2のパラメータ、及び目標位置に到達する時刻teの関係を定めた第3のマップと、現在の自車両と目標位置との間の距離及び自車両の速度に基づいて演算された第1のパラメータ、第2のパラメータとを用いて車体合成力を導出する。
(もっと読む)
走行支援装置
【課題】ステアリング及びブレーキによる車線逸脱防止制御中のドライバの操舵介入に対しては違和感のない逸脱防止制御を行うことはできない。
【解決手段】自車が車線からの逸脱しそうな場合又は自車が周囲障害物と衝突しそうな場合に、ブレーキ制御装置によるヨーモーメント又はステアリング制御装置のアシスト操舵トルクの少なくとも一つを制御し、自車の車線からの逸脱又は自車の周囲障害物との衝突を防止する制御装置であって、ステアリングのハンドル舵角,ドライバの操舵トルク及びアシスト操舵トルクの少なくとも一つに基づきドライバの操舵意思を検出し、ドライバの操舵意思を妨げないようにヨーモーメント又はアシスト操舵トルクの少なくとも一つを抑制する。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】ブレーキに対して過度な負荷が加わることなく、ブレーキ装置により発生する振動や騒音も抑制し、ステアリング制御とブレーキ制御とによりドライバに対して現状の走行状態を的確に伝達しつつ、適切に車両の路外逸脱を防止する。
【解決手段】白線からの逸脱量に応じ白線からの逸脱を防止する第1のブレーキ制御量ABL0を、障害物に対する逸脱量に応じ障害物に対する逸脱を防止する第2のブレーキ制御量ABS0を設定し、白線からの逸脱を防止する第1のステアリング制御量ASL0を、第1のブレーキ制御量ABL0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定し、障害物に対する逸脱を防止する第2のステアリング制御量ASS0を、第2のブレーキ制御量ABS0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定する。そして、これらを基に、ブレーキ制御量AB、ステアリング制御量ASを算出する。
(もっと読む)
車両用接触回避支援装置
【課題】レーンキープアシスト手段によって車両が操舵制御されているときには、接触回避支援処理が過剰に作動しないようにする。
【解決手段】接触回避ECU20は、レーンキープアシスト部96によって車両10が操舵制御されているときは、車両10が自車線302を逸脱する可能性がきわめて低いことを考慮し、レーダ80によって検出された車両前方の対向車11との相対位置に基づき得られる接触余裕値Laの閾値Laを、レーンキープアシスト部96によって車両10が制御されていないときの第1閾値Lth1より小さい第2閾値Lth2に置き換えて、対向車11に対する当該車両10の接触回避支援を行うようにしたので、接触回避支援処理が過剰に作動する状況を防止できる。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なシステム構成にて実現する。
【解決手段】
車両の緊急状態を回避する回避制御の目標減速度を演算する回避制御手段と、選択車輪に制動トルクを付与して車両の安定性を確保する安定化制御の目標スリップ速度を演算する安定化制御手段と、実車輪速度を取得する車輪速度取得手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを目標減速度に基づいて制御するとともに、選択車輪に付与する制動トルクを選択車輪の目標スリップ速度、及び、非選択車輪の実車輪速度に基づいて制御する。
(もっと読む)
ブレーキ制御システム
【課題】マスタシリンダ圧を精確に検知し、バックアップする機能を備えて、的確なブレーキ制御を可能とするブレーキ制御システム。
【解決手段】運転者のブレーキ操作により作動するマスタシリンダと、ブレーキ操作の量に応じて前記マスタシリンダ内の圧力を調整する第1の機構と、前記第1の機構の作動を制御する第1の制御装置と、マスタシリンダ内の前記圧力がホイールシリンダに連通するのを調整する第2の機構と、前記第2の機構の作動及び前記ホイールシリンダに連通される圧力を加圧するポンプ装置の作動を制御する第2の制御装置とを備え、第1及び第2の制御装置は、それぞれの電源回路及びCPUを内蔵し、前記マスタシリンダ内の圧力を計測するものであって前記第1の制御装置に結線される第1の液圧センサと、前記マスタシリンダ内の圧力を計測するものであって前記第2の制御装置に結線される第2の液圧センサと、を装備したことを特徴とする。
(もっと読む)
21 - 40 / 113
[ Back to top ]