
Fターム[3D246GB36]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | レーンキープ (113)
Fターム[3D246GB36]に分類される特許
41 - 60 / 113
車両制御システム
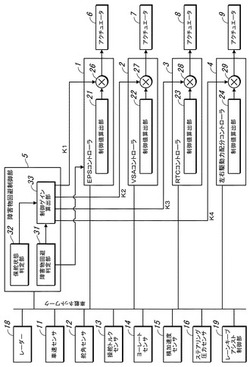
【課題】自車の進路上の障害物を回避する際に、ドライバの保舵状態の違いによって車両挙動制御装置の制御が影響を受けることを抑制して、障害物回避能力を向上させる。
【解決手段】操舵角に基づいて車両の挙動を制御するEPSコントローラ1、VSAコントローラ2、RTCコントローラ3、及び左右駆動力配分コントローラ4と、自車の進路上の障害物を検知するレーダー装置18と、障害物を回避するドライバの操作を判別して各コントローラを制御する障害物回避制御部5とを有し、この障害物回避制御部が、ドライバの保舵状態が変則的か否かを判別して、保舵状態が変則的である場合には、障害物回避制御中に各コントローラの制御値が増大補正されるように制御する構成とする。
(もっと読む)
車両制御装置

【課題】 運転者にとってより自然な軌跡を求めることができる車両制御装置を提供する。
【解決手段】 カーブ路における車両の目標走行軌跡を最適化手法に基づいて求める車両制御装置において、そのカーブ路中で目標走行軌跡がカーブ路のレーン内側ラインに最も近接する最近接位置(C/P)がカーブ路通過時間を最短化する場合の最近接位置(C/P)よりカーブ路出口側へ位置させる条件を付加する、具体的には、評価関数にC/Pが後方側へと位置する条件を付加して所望の目標走行軌跡を求める。
(もっと読む)
車両制御装置、車両および車両制御方法
【課題】車両制御における運転者の違和感を抑制することができる車両制御装置、車両および車両制御方法を提案すること。
【解決手段】実相対距離Drに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対距離Dsを算出し、実相対速度Vrに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対速度Vsを算出し(ステップST2)、知覚相対距離Dsと知覚相対速度Vsとの比である知覚相対比Xを算出し(ステップST3)、知覚相対比Xがしきい値X0を越える場合に車両制御を行う(ステップST4,5)。知覚相対比X(知覚相対比Xが反映された制御値)に基づいて車両制御を行うので、車両制御における運転者の違和感を抑制することができる。
(もっと読む)
動的注意モジュールを備えた運転者支援システムまたはロボット
【課題】視覚に基づく注意システムに関し、自車両の周辺環境をモニタし、運転者を支援(アシスト)する。
【解決手段】少なくとも1つの視覚センサと、少なくとも1つの2次元特徴マップを生成するよう、前記視覚センサの出力信号を処理する少なくとも1つの画像処理モジュールと、前記少なくとも1つの特徴マップに基づいて、第1の顕著性マップを生成する背側注意サブシステムであって、該顕著性マップは、運転者支援システムの注意の焦点を示す、システムと、背側注意サブシステムとは独立し、前記少なくとも1つの特徴マップに基づいて、第2の顕著性マップを生成する腹側注意サブシステムであって、該特徴マップは、背側注意サブシステムにおいて用いられるものと同じでも異なってもよい、システムと、を備える。該第2の顕著性マップは、予期しない視覚刺激を示す。
(もっと読む)
車両用衝突可能性判定装置
【課題】 交差点における自車および交差車両の衝突可能性の判定を的確に行えるようにする。
【解決手段】 自車の進行方向に基づいて自車の進路を予測し、自車の進行方向と交差する方向に移動する交差車両を検知し、交差車両の進行方向の変化に基づいて交差車両の進路を予測し、自車の進路および交差車両の進路に基づいて自車および交差車両の衝突可能性を判定する。その際に、自車の停止状態からの発進に応じて交差車両が自車から離れる方向に進路変化した場合に、その後の交差車両の進路が前記進路変化前の進路に戻るように変化すると予測し、前記予測された進路に基づいて自車および交差車両の衝突可能性を判定するので、一旦回避操作を行った交差車両が元の進路に戻ろうとして戻し操作を行うことを見越して衝突可能性を判定することが可能となり、衝突可能性の判定精度が向上する。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に違和感の少ない支援を行うことでドライバビリティの向上を図る。
【解決手段】車両に作用する力を調整して車両の走行を制御可能に構成し、車両の走行状態に応じて車両に作用する力を調整する作用力調整手段と、ドライバが車両の走行を操作する操作部材の操作状態を検出する操作状態検出手段と、操作部材の操作状態に応じて作用力調整手段による調整度合を変更する調整度合変更手段とを設ける。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
車両用走行制御装置及びその方法
【課題】車線逸脱防止制御が作動し、かつ4WD状態になっている場合に、それら車線逸脱防止制御の作動及び4WD状態を適切に終了させる。
【解決手段】車両用走行制御装置は、制駆動力を制御して自車両にヨーモーメントを付与し走行車線に対する自車両の逸脱を防止する車線逸脱防止制御が作動し、かつ前後輪の駆動トルクを制御する4WD制御が作動している場合において(ステップS51、ステップS52)、車線逸脱防止制御の作動が終了し、かつ4WD制御の作動が終了するときには、それら終了が同時になされることを禁止する(ステップS53〜ステップS56)。
(もっと読む)
運転支援装置
【課題】運転支援の機能を運転者が適切に利用することができる運転支援装置を提供すること。
【解決手段】本発明に係る車両の制御により運転者の運転を支援する運転支援装置は、運転支援制御中における運転者の操作介入に基づいて、運転支援制御を制限する運転支援制限手段と、運転支援制御の信頼度を検出する信頼度検出手段と、信頼度に応じて運転支援制限手段の作動条件を変更する作動条件変更手段と、を備えることを特徴とする。
(もっと読む)
制動装置及び制動方法
【課題】自動ブレーキ作動中にブレーキペダルの操作が行われた際における、運転者に対するペダル違和感を低減する。
【解決手段】運転者が操作する制動操作子に連結するマスタシリンダをブレーキ配管を介してホイールシリンダに接続すると共に、そのブレーキ配管にホイールシリンダの液圧を調整可能な流体圧制御回路を設ける。そして、所定の作動条件を満足することで制動要求指令値を演算して、上記ホイールシリンダの液圧が上記制動要求指令値に応じた液圧となるように上記流体圧制御回路を制御する。この際に、上記制動操作子の操作を検出すると所定の減少勾配で上記制動要求指令値を小さくし、その上記所定の減少勾配を、上記制動操作子の制動方向への操作速度が大きいほど大きくする。
(もっと読む)
制動装置及び制動方法
【課題】自動ブレーキ作動中にブレーキペダルの操作が行われた際における、運転者に対するペダル違和感を低減する。
【解決手段】所定作動条件で、マスタシリンダ10とホイールシリンダとを接続するブレーキ配管23に介装した制御弁及びポンプ17を制御して上記ホイールシリンダの液圧を自動制御する。その自動制御が作動中に、運転者がブレーキペダル22を踏込むと、踏込み速度に応じて、上記ポンプ17による、上記マスタシリンダ10からの単位時間当たりの作動液吸込み量を増大する方向に補正する。
(もっと読む)
ブレーキ制御装置
【課題】コストを抑制しつつ、滑らかなブレーキ制御を実現する。
【解決手段】制御周期が異なる複数のモジュールを備えるブレーキ制御装置において、第1モジュールは、第1制御周期で第1制御目標値を出力する。第2モジュールは、第1モジュールから出力された第1制御目標値にもとづいて第2制御目標値を第1制御周期より短い第2制御周期で演算する。目標変化値算出手段は、第1制御目標値が更新された場合、第1制御目標値にもとづいて新たな目標変化値を算出し、第1制御目標値が更新されなかった場合、前回算出された目標変化値を新たな目標変化値とする。第2制御目標値算出手段は、第1制御周期と第2制御周期との基本周期比をもとに調整された調整周期比によって新たな目標変化値を補正し、補正された目標変化値にもとづいて新たな第2制御目標値を算出する。
(もっと読む)
制動制御システム
【課題】ホイールシリンダの圧力を制御する調圧弁はオン・オフ弁であることから、バルブが開くと液圧変動が発生してしまうため、制御性が悪く、場合によっては、車両の挙動変化や振動音やブレーキペダルの震え等が発生してしまう虞がある。
【解決手段】ブレーキアシスト制御を行うブレーキアシスト制御部11と、左右制動力配分制御を行うLDP制御部12と、ブレーキアシスト制御の介入時、左右制動力配分制御が介入すると、左右制動力配分非制御輪のホイールシリンダの圧力を、ドライバブレーキ圧力に戻すようにブレーキアシスト制御を終了させる制動制御部10とを有する。
(もっと読む)
車線逸脱防止装置
【課題】運転者の意識に応じた適切な操舵トルクを発生する車線逸脱防止装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するよう操舵機構に操舵トルクを付与する車線逸脱防止装置を、自車両前方の環境情報を取得して自車両の走行車線を設定する車線設定手段110と、運転者の操舵操作による入力トルクを検出する入力トルク検出手段140と、走行車線からの自車両の逸脱傾向を判定する逸脱判定手段130と、逸脱判定手段が逸脱傾向を判定した場合に、逸脱を防止する方向へ入力トルクに応じた操舵トルクを前記操舵機構に付与する操舵制御手段170とを備える構成とする。
(もっと読む)
走行支援装置
【課題】
従来技術では、ブレーキ制御ではステアリング制御よりも小さいヨーモーメントしか発生できないため、確実な障害物回避を実現できず、ステアリング制御では車線を跨ぐ度にハンドルが取られるため、ドライバが違和感を覚える、という課題がある。
【解決手段】
走行支援装置は、自車の走行状態とレーンマーカの位置と自車の周囲障害物の位置及び種別を検出する検出部と、自車の走行状態とレーンマーカの位置と周囲障害物の位置及び種別に基づいて、レーンマーカからの逸脱及び周囲障害物との衝突を防止するように目標ヨーモーメントを算出する算出部と、自車の走行状態,レーンマーカの位置,障害物の位置及び種別の少なくとも一つに基づいて、目標モーメントを、制駆動力を制御する第1のアクチュエータと操舵を制御する第2のアクチュエータに配分する配分部を備える。
(もっと読む)
運転支援装置
【課題】ドライバの運転意思低下時に適切な運転支援制御を行う運転支援装置を提供する。
【解決手段】自車両前方の環境を認識して操舵機構に操舵力を付与する操舵制御、及び、自車両を減速させる減速制御を行う運転支援装置を、自車両の走行車線を認識する車線認識手段110と、走行車線内に設定された目標走行位置に沿って自車両が走行するように目標操舵力を設定する目標操舵力設定手段140と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段160と、自車両を減速させる減速制御手段190と、ドライバの運転意思低下を判定する運転意思判定手段180とを備え、操舵制御手段は、運転意思低下の判定に応じて操舵力の付与を中止し、減速制御手段は、運転意思低下の判定に応じて自車両を減速させる構成とする。
(もっと読む)
ブレーキ制御システム
【課題】停車時に余分な消費電力と発熱を低減すると共に、スムーズな発進を実現し、発進と停止の切替え時に運転者の意図に反することのないブレーキ制御装置を提供する。
【解決手段】ブレーキペダルの操作量を電気信号で検出し、該電気信号から運転者の要求制動力を算出して発生させるブレーキ制御装置において、停車状態と判定された後、実制動力に対応する電気信号が停車時に発生させる停車時制御力指令値を超えていると判断された場合、制動力の制御モードを停車時制御モードに切替えること、及び、要求制動力が、前記停車時制動力指令値より小さくなったと判断された場合、制動力の制御モードを通常制御モードに切替えること、かつ、前記停車時制御モードで、ブレーキ手段で発生する制動力を停車保持制動力とし、前記通常制御モードでは、ブレーキ手段で発生する制動力を運転者の要求制動力とする。
(もっと読む)
操向支援装置
【課題】ドライバの運転意識に応じて操舵制御と制駆動力制御との制御分担比を適切に設定する操向支援装置を提供する。
【解決手段】操向支援装置を、自車両前方の環境情報を認識する環境認識手段110と、自車両の車両状態を検出する車両状態検出手段130と、操舵機構に操舵力を付与する操舵制御手段190と、左右輪の制駆動力差によりヨーモーメントを発生させる制駆動力制御手段200と、環境認識手段及び車両状態検出手段を用いて目標操向量を設定する目標操向量設定手段140と、目標操向量に基づいて操舵制御手段の目標操舵量及び制駆動力制御手段の目標制駆動力差を設定する操向制御手段180と、ドライバの覚醒度Aを検出する覚醒度検出手段160とを備え、操向制御手段は、覚醒度の低下に応じて、操舵制御手段の制駆動力制御手段に対する制御分担比RSTRを増加させる構成とする。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線の認識度が低くても、運転者の運転を支援する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】予め設定した所定時間後の自車両の将来の横位置を予測する。その予測した自車両の将来の横位置が、車線区分線を基準として予め定められた所定の車線幅方向位置よりも自車線中央側からみて外側に位置すると判定すると、自車線中央側に向かうヨーモーメントを車両に付与するように車両制御を開始する。このとき、前記車線区分線を検出できない若しくは認識度が低い場合には、車線区分線を正常に検出しているときと比較して、前記制御を抑制する。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】車線区分線を推定する場合でも、適切なヨーモーメントの大きさにする。
【解決手段】車線逸脱防止装置は、車線区分線検出手段により車線区分線の検出精度が低下している場合、推定した車線区分線を基に、走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行い(ステップS11、ステップS12)、車線区分線の検出精度が低下している時間に応じて、車線逸脱防止制御の制御量を小さくする補正をする(ステップS3〜ステップS5)。
(もっと読む)
41 - 60 / 113
[ Back to top ]