
Fターム[3D246HA01]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070)
Fターム[3D246HA01]の下位に属するFターム
Fターム[3D246HA01]に分類される特許
21 - 37 / 37
運転支援装置
【課題】運転者のシステムへの過信や依存を防止することが可能な運転支援装置を提供する。
【解決手段】レーダセンサ12が取得した他車両に関する指標及び車速センサ56が取得した車速に基づいて自車両の最終要求加減速度を取得し、最終要求加減速度に基づいて自車両の減速度を制御するブレーキ制御ECU42を備えるため、自車両周辺の他車両との相対関係や自車両の車速に基づいて自車両の減速度を制御することができる。また、ブレーキ制御ECU42は、取得した危険度である必要加減速度の大きさがKLMTよりも大きい場合に、自車両の運転者に違和感を与えるように自車両の減速度を制御するため、減速時に危険度が大きいときは、運転者は減速度の制御によって違和感を覚えることになり、当該違和感によって運転者のシステムへの過信や依存を防止することが可能となる。
(もっと読む)
制動力制御装置

【課題】
衝突の回避が不可と判断されて自動ブレーキが作動中に、路面の段差により車輪が路面から離れてしまうと輪荷重が減少して制動距離が長くなる。
【解決手段】
本制動力制御装置は、自車と障害物との相対距離及び相対速度を計測する第1のセンサと、路面の段差の上下変化状態及び自車と段差までの距離を計測する第2のセンサと、相対距離及び相対速度に基づいて、自車と障害物とが衝突するか否かを判断する衝突判断部と、上下変化状態及び段差までの距離に基づいて、自車が当該段差を通過する時のサスペンションの制御方向を判断する路面判断部と、ブレーキを制御するブレーキ制御部と、自車の車高を制御する車高制御部と、を備え、車高制御部は、ブレーキ制御部がブレーキを制御した際、車高を現在の車高よりも高く上げるよう制御し、路面に段差がある場合、当該段差の形状に基づいて当該車高の制御を変更する。
(もっと読む)
ブレーキ制御装置
【課題】ホイールシリンダの液圧を減圧する際に発生するノイズを抑制することにより車内における快適性を向上する。
【解決手段】ブレーキ制御装置20は、液圧回路に配置された減圧リニア制御弁67、レギュレータカット弁65、マスタカット弁64を開閉制御することでホイールシリンダ23の液圧を減圧する。ブレーキECU70は、車両の状態を検出し、検出した車両の状態に基づいて、ホイールシリンダ圧の減圧によるノイズの車両への影響の程度を推定し、該推定結果に基づいて、減圧リニア制御弁67、レギュレータカット弁65、マスタカット弁64のいずれの電磁弁を用いてホイールシリンダ圧の減圧を行うか選択する。
(もっと読む)
ブレーキ制御装置
【課題】制御弁の作動音を低減する。
【解決手段】ブレーキ制御装置は、車両に付随して設けられている少なくとも1つのセンサを含む検出系と、該車両に付与される制動力を制御するための液圧回路に設けられた電磁制御弁と、検出系からの出力を受信可能に検出系と接続され、要求される制御応答性で電磁制御弁を開閉することが保証される第1の電流プロファイルに従って制御電流を与えて電磁制御弁を開閉する制御部と、を備える。制御部は、検出系からの出力に基づいて電磁制御弁の制御応答性の低下が許容されるか否かを判定し、制御応答性の低下が許容されると判定した場合に、第1の電流プロファイルよりも電磁制御弁の作動音を低減するよう調整された第2の電流プロファイルに従って電磁制御弁に制御電流を与える。
(もっと読む)
操作支援装置および操作支援方法
【課題】作動機構制御(車両運動制御を含む)において、操作者(車両運転者を含む)の認定や操作者の操作を正確にモニタして推定を行い、この推定結果に基づいて作動機構の動作(車両運動を含む)をより安全かつ快適にすることができる操作支援装置および操作支援方法を提供する。
【解決手段】筋骨格状態検知部を制御して操作者の筋骨格状態情報を取得し、取得された筋骨格状態情報に基づいて、操作者により操作部材の操作が行われるか否かを予測し、操作部材の操作が行われると予測された場合、当該操作部材が操作される前に、作動機構の実動作の前処理動作を実行するか、または、実動作を開始する。
(もっと読む)
制動制御装置および制動制御方法
【課題】ホイールシリンダ圧を迅速に増圧させることを要する場合においても、適切に制動力を発生させることが可能な制動制御技術を提供する。
【解決手段】制動制御装置20において、レギュレータ流路62は、ホイールシリンダ23と接続され、ブレーキペダル24の踏み込み操作にしたがってホイールシリンダ23へ作動液が流動することによりホールシリンダ圧が増圧される。アキュムレータ流路63は、ホイールシリンダ23と接続され、ホイールシリンダ23へ作動液が流動することによりホールシリンダ圧が増圧される。レギュレータ圧センサ71は、レギュレータ流路62の液圧を検出する。ブレーキECU70は、レギュレータ流路62の液圧変動を補償した値を利用して目標ホイールシリンダ圧を決定する補償決定処理を実行する。ブレーキECU70は、決定した目標ホイールシリンダ圧に近づけるようホイールシリンダ圧を制御する。
(もっと読む)
停車時後退防止装置
【課題】運転者がアクセル操作により登坂路停車を行おうとした場合でも、自動ブレーキにより当該登坂路停車を実行させて、自動変速機内のクラッチ寿命を延ばす。
【解決手段】登坂路走行中アクセルを釈放し、ブレーキ操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、t1に車速VS=0の停車状態となり、その後t2より、運転者が図示のアクセル開度APOによって停車状態を維持しようとした場合、アクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であるt3までは、ヒルホールド力ブレーキ配分率αを100%に向け一定の時間変化割合で増大させ、t3〜t4間におけるごとくtTd≧Td(θ)であれば、αを一定の時間変化割合で0%へと低下させる。よって、ヒルホールドブレーキ力hTb=tTd×α、および、クラッチ経由車輪駆動力cTd=tTd−hTbはそれぞれ図示のごときものとなり、アクセル操作により登坂路停車を行おうとした場合でも、ヒルホールドブレーキ力hTbにより登坂路停車が可能である。
(もっと読む)
状態推定システム
【課題】観測データに含まれるノイズや不要なデータを除去して的確な入力情報のみをニューラルネットワークに適応可能とし、教師データへのマッチング精度や計算速度を向上させる。
【解決手段】状態推定システム1は、NNS2への前処理部として、観測データを独立成分分析するICA部5と主成分分析するPCA部6とを備え、ICA部5、PCA部6、NNS2への入力パターンを適応的に決定するGA部7を備えている。ICA部5は観測データから電気的・機械的なノイズ成分を除去した原信号を推定してNNS2へ入力し、PCA部6はICA部5では把握しきれない非線形な部分での不要なデータを除去し、誤差を低減した代表的な特性データをNNS2へ入力する。これにより、NNS2への入力情報を的確な情報とすることができ、NNS2における教師データへのマッチング精度や計算速度を向上させることができる。
(もっと読む)
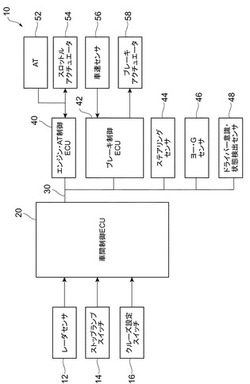
車両用走行制御装置
【課題】運転者のブレーキペダル操作を確実に検出する車両用走行制御装置を提供すること。
【解決手段】車両に搭載され、自車両の車速が所定の速度となるように車両制御を行い、減速時にはブレーキブースタを制御して所定の減速度が得られるようにマスタシリンダ圧を発生させる、車両用走行制御装置に、ブレーキブースタに内蔵され、自車両のブレーキペダルが踏み込まれたときにオンとなるスイッチ手段と、マスタシリンダ圧を検出する検出手段と、スイッチ手段がオフとなり、且つ、検出手段により検出されたマスタシリンダ圧が所定の閾値を超えたとき、上記車両制御を中止させる制御中止手段と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】ペダルフィーリングを向上する。
【解決手段】ブレーキ制御装置は、車両が押し出され状態となる可能性があるか否か予測し、車両が押し出され状態となる可能性があると予測された場合、運転者によりブレーキペダルが操作されたのと略同時にポンプの駆動を開始する。そして、実際に車両が押し出され状態となったか否かを判定し、車両が押し出され状態にあると判定された場合に、リニア制御弁を調整することにより、ポンプで加圧された作動流体をホイールシリンダに供給してホイールシリンダ圧を増圧させる。
(もっと読む)
車両用制動制御装置
【課題】車両用制動制御装置において、車両の走行状態に拘らず常時ドライバの意思に応じた最適な制動力を発生されることで高精度な制動力制御を可能としてドライバビリティの向上を図る。
【解決手段】メインECU112は、ドライバの要求制動力に基づいてブレーキECU116によりマスタシリンダ13及び油圧ポンプ51,52を制御すると共に、モータECU111により電気モータ102を制御可能とすると共に、ハイブリッド車両における実減速度と、油圧ポンプ51,52の作動により発生するマスタシリンダ圧の減圧分から推定した推定減速度との偏差に基づいて、油圧ポンプ51,52による加圧制動力と電気モータ102による回生制動力との配分を変更する。
(もっと読む)
自動車の後輪の少なくとも1つの方向転換アクチュエータに適用される方向転換設定点を管理するための方法と装置
本発明は、4つの操舵車輪を有する自動車の後輪の少なくとも1つの方向転換アクチュエータに適用される方向転換設定点(17)を管理するための方法に関する。前記方向転換設定点(17)は、路面に対するタイヤの保持力が非対称である状態で制動するときに、方向転換制御ユニット(14)によって生成される。本方法は、路面に対する4つの車輪のタイヤの保持力が非対称である状態で制動することによって生成されるヨートルクを相殺するために、後輪の中間方向転換設定点(2)を計算するステップと、この中間方向転換設定点(2)を、前記後輪の少なくとも1つの方向転換アクチュエータに伝送するステップとを有し、受け入れモジュール(3)を使用して前記中間方向転換設定点の値を監視するステップと、中間方向転換設定点(2)の受け入れモジュール(3)によって生成された情報(5、6)を制動制御ユニット(4)に伝送するステップとを有することを特徴とする。 (もっと読む)
車両およびその制御方法
【課題】停車状態を保持する制御を解除するときの車両の飛び出し感を抑制する。
【解決手段】ブレーキホールド制御が実行されているときのアクセルペダルの踏み込みに対しては、アクセル開度Accがブレーキホールド制御を解除する条件としての解除判定閾値Aref以上閾値A2未満では、制御用アクセル開度Acc*が値0を超えて設定されないようにする。これにより、ブレーキホールド制御を解除するときの車両の飛び出し感を抑制することができる。また、ブレーキホールド制御を解除する際に値0を超える制御用アクセル開度Acc*の設定を開始するときの閾値A2として、通常時の閾値A1より大きな値を用いる。これにより、通常時に比してアクセルペダルの同じ踏み込みに対して値0を超える制御用アクセル開度Acc*を設定しない範囲が確保されるから、車両の飛び出し感をより確実に抑制することができる。
(もっと読む)
自動走行車両および追尾システム
【課題】安定した隊列走行を実現すること。
【解決手段】先導車両に追従して自動走行する自動走行車両であって、前方車両との車間距離に応じて走行速度を制御する制御装置を具備する自動走行車両を提供する。
(もっと読む)
自動車ブレーキ装置を作動させるためのブレーキ作動ユニット
本発明は、自動車用「ブレーキバイワイヤ」型ブレーキ装置を作動させるためのブレーキ作動ユニットであって、
・運転者の要求に応じて、シャフトに取り付けられるブレーキペダル及び電子制御ユニットの双方によって操作可能なブレーキブースタであって、「ブレーキバイワイヤ」操作モードにおいてブレーキペダルとブレーキブースタとの間の動力伝達接続を切り離すための手段が提供されるブレーキブースタ、
・運転者の減速要求を検出するための手段、及び
・ブレーキペダルと相互作用するとともにシミュレータばねから形成され、ブレーキペダルに接続される動力伝達部品と2個の軸受によってシャフトに取り付けられるシミュレータハウジングとの間の作用の観点から構成されるペダル行程シミュレータ
を有するブレーキ作動ユニットに関する。本発明に従えば、シミュレータハウジング(22)は円筒形領域(26)を備えることにより2個の軸受(27、28)を収容するよう構成される。この方策により、ペダル行程シミュレータの作動中に生じる変形を大幅に低減することが可能となる。
(もっと読む)
下り坂の運転中に自動車両の制動を制御するシステム及び方法
下り坂運転中に自動車両の制動を制御するシステムであって、車両が常用摩擦制動装置18と、リターダ・ブレーキ26及び車両の運転者によってリターダ・ブレーキを始動させるためのレバー40を備える補助制動装置25とを含むシステムが、車両の運転条件のパラメータの値に基づいて、下り坂運転時に車両に制動作用を適用するために、運転者がレバー40を作動させることによりリターダ・ブレーキ26を始動させる際に、補助制動装置のみで車両に適用される制動作用を得ることができるかどうかを計算するように適合されている手段29を含む。その計算が補助制動装置のみでは車両に適用される制動作用を得ることができないことを示す場合に、制動制御手段28が、補助制動装置を助けるために常用摩擦制動装置を始動させるように適合されている(図1)。 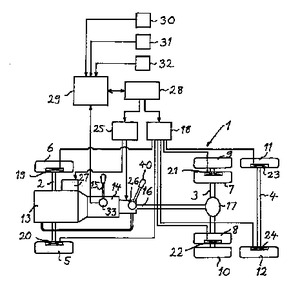 (もっと読む)
(もっと読む)
軌条走行車両のブレーキ装置
本発明は軌条走行車両のためのブレーキ装置に関し、ブレーキ制御ユニットがデータバスシステムを介して複数のブレーキユニットと接続されている。データバスシステムはテレグラムの伝達のために用いられ、データバスシステムには伝送エラーを識別するためフェイルセーフ装置が所属し、このフェイルセーフ装置は、伝送エラーが存在する場合ブレーキユニットを作動させるために、出力側で常用ブレーキ及び非常ブレーキのブレーキユニットと接続されている。 (もっと読む)
21 - 37 / 37
[ Back to top ]