
Fターム[3D246HA27]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 燃料供給状態 (103)
Fターム[3D246HA27]に分類される特許
61 - 80 / 103
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
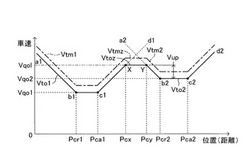
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
車両の速度制御装置

【課題】カーブを通過する際、運転者の車両を加速させたいという意志に応じて、運転者の違和感が少なく且つ円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ車速制御において、運転者が加速操作を行わない場合(加速操作量Ap=0)に対応する目標車速Vtoが、第1、第2、第3目標車速Vto1,Vto2,Vto3で構成される特性に従って決定される。Vto1は、地点Pcrまで減少して地点Pcrにて適性車速Vqoとなり、Vto2は、地点Pcrから地点Pcaまで適正車速Vqoに維持され、Vto3は、地点Pcaから地点Pcsまで増大する特性に決定される。運転者による加速操作量Apに基づいて修正車速Vzが演算され、制御中に亘ってVtoにVzが加算されて目標車速Vt(=Vto+Vz)が決定される。そして、車速が目標車速Vtを超えないように調整される。
(もっと読む)
車両の運動制御装置
【課題】操舵操作に基づいて急激なヨーイング挙動の発生を予測し、車両安定性制御における制動液圧の応答性を向上させることができる車両の運動制御装置を提供する。
【解決手段】車両のオーバステアを抑制する車両安定性制御を実行する車両運動制御装置において、操舵角に基づいて急激な車両のヨーイング挙動を予測し、適切な車輪の制動手段に対して予圧を付与する予圧制御を実行する。操舵角センサによって操舵角を検出し、検出された操舵角に基づいて操舵角速度を演算する。操舵角が増加するときに操舵の切り返し状態を判定し、切り返し操舵状態のときの操舵角速度が大きい場合に、制動手段に対して予圧を付与する予圧制御を実行する。
(もっと読む)
ブレーキ操作装置および液圧ブレーキシステム
【課題】マスタシリンダ液圧センサによる検出値に基づく場合より、早期に、ブレーキ操作部材の操作開始を検出する。
【解決手段】ブレーキペダルが操作されると、バキュームブースタにおいて、パワーピストンが前進し、負圧室の容積が減少する。負圧室の容積の減少に伴って負圧室の負圧が大気圧に近づく。一方、パワーピストンの前進に伴ってマスタシリンダの加圧ピストンが前進し、加圧室の液圧が増加するが、加圧室の液圧の増加は、パワーピストンの前進に対して遅れて検出される。したがって、負圧室の負圧に基づけば、マスタシリンダ液圧センサによる検出値に基づく場合より、早期のブレーキ操作部材の操作開始を検出することができる。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動変速と手動変速とを設定するための変速設定部における設定内容を示す情報を取得し、前記変速設定部にて手動変速が設定されている場合には、前記所定区間の開始地点に到達する前に、当該加速変速比を示す案内を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速させるための制御を実施する状態と実施しない状態とを利用者の意図通りに柔軟に切り替えることができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動制御と手動制御とを設定するための制御設定部における設定が手動制御から自動制御に切り替えられたことを判別し、前記設定が前記手動制御から前記自動制御に切り替えられた場合に、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるとともに、前記自車両の変速比を前記加速変速比に設定させる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施規定の選択を取得し、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための減速制御を行う。
(もっと読む)
車両走行制御装置及びその方法
【課題】車両の走行中運転席ドアが開いている場合にも、車両の走行を可能とする。
【解決手段】車両10に設けられた複数のドア14A、14Cが、走行中に開いているかどうかを検出し、いずれかのドア14A、14Cが開いていると検出されたとき、開いているドアが運転席ドア14Aであるかどうかを判定し、運転席ドア14Aのみが開いていると判定された場合に、車両10の走行を許可するようにしているので、運転席ドア14Aを開けて周りを確認しながら駐車する際、円滑に駐車することができる。
(もっと読む)
運転支援装置
【課題】カーブ進入時における運転者の違和感を軽減した運転支援装置を提供する。
【解決手段】車両の運転を操舵トルクの付与により支援する運転支援装置において、車速検出手段120と、操舵角、ヨーレート、求心加速度の少なくとも1つを検出する操舵実際値検出手段130と、カーブの曲率を取得するカーブ曲率取得手段110と、操舵目標値を算出する操舵目標値算出手段160と、操舵機構10へ操舵トルクを付与する操舵制御を実行する操舵制御手段170と、操舵目標値と操舵実際値に基づいて操舵制御の実行を予測する操舵制御予測手段180と、操舵制御の実行が予測される時に操舵制御の実行に先立って第1の減速制御を実行する第1の減速制御手段180とを備える構成とする。
(もっと読む)
車両の走行制御装置
【課題】複数の制御モードを有する車両挙動制御に対し、クルーズ制御において、演算を複雑にすることなく車両挙動制御で選択された車両挙動特性に適合する出力特性を得ることができ、良好なドライバビリティを得る。
【解決手段】車両挙動制御部1は、ABS制御と横滑り防止制御とトラクション制御の全てを実行する通常モードと、ABS制御と制限した横滑り防止制御とトラクション制御を実行するトラクションモードと、ABS制御のみを実行するOFFモードの3つのモードが設定されており、モード切換スイッチ14でドライバにより選択される。一方、クルーズ制御部2には、モード切換スイッチ14に応じたそれぞれのモードに対応する上限ガード値が設定されており、クルーズ制御時は、この上限ガード値で目標車速を制限することで、通常運転時の車両挙動制御のモードに適合する出力特性を設定する。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において重要度の高いがタスクの待ち時間が長い場合に、待ち時間を短縮する。
【解決手段】複数の各タスクに、実行順序の優先度に応じて設定した初期重み値を与え、該初期重み値に基づく実行順序に従って前記複数のタスクを実行する車両制御装置において、各タスクの重要度に応じて重み付け値(W)を付与しておき、実行待ちタスクの待ち時間に基づいてタスクの実行順序の優先度を変更する。
(もっと読む)
回転制御装置
【課題】車輪等の負荷がかかった回転体の回転速度の変化を簡単な構成で検出できる回転制御装置を提供する。
【解決手段】接触路面による所定の負荷がかかった状態で回転するタイヤ2に2つのセンサユニット100A,100Bを180度回転対称な位置に装着し、それぞれのセンサユニットに備わる回転接線方向の加速度を検出する加速度センサの検出値を無線送信して、駆動制御ユニット200Aにより受信し、一方の加速度センサによって検出された回転接線方向の加速度の値と他方の加速度センサによって検出された回転接線方向の加速度の値との和の値を算出し、スタビリティ制御ユニット700によってこの加算値と予め設定されている所定の閾値とを比較し、比較結果に基づいてタイヤ2の回転駆動を制御する。
(もっと読む)
車両の走行制御装置
【課題】先行車と認識されない制御対象物であっても一定条件が満足された場合、先行車と見なして追従させることで、運転者の意思に沿った良好な走行状態を得ることができるようにする。
【解決手段】制御対象物に対する自車両1の衝突予想時間TTCが設定しきい値Toよりも短い場合(S18)、制御対象物を先行車と見なし、自車両1を制御対象物に追従させる(S23)。又衝突予想時間TTCが設定しきい値Toより長い場合であっても、制御対象物が自車走行レーン上ある場合(S20)、或いは自車走行レーンが認識されない場合であっても、自車両1と制御対象物とのラップ率εがラップ率判定しきい値εo以上の場合(S21)、制御対象物を先行車と見なし、自車両1を制御対象物に追従させる(S24)。
(もっと読む)
制動力制御装置及びその方法
【課題】停車時に車両に制動力を発生させつつも、車両を円滑に発進させる。
【解決手段】制動力制御装置は、機械的連結により制動装置を動作させて車輪に制動力を発生させる電動パーキングブレーキ装置10と、液圧により制動装置を動作させて車輪に制動力を発生させる液圧ブレーキ装置40と、自車両の停止中に電動パーキングブレーキ装置10が作動している場合において、自車両が発進すると予測したとき、制動力を、電動パーキングブレーキ装置10によるものから液圧ブレーキ装置40によるものに切り替える。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】制動装置全体の消費電力の増加を抑制しつつ、ブレーキロータ及びブレーキパッドの偏摩耗の発生を抑制できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、路面判定処理を実行して車両の走行する路面の悪路指数を演算する(ステップS10)。そして、ECUは、ステップS10にて演算した悪路指数に基づき、車両の走行する路面が凹凸度合の比較的大きな悪路から凹凸度合の比較的小さな良路に変わったか否かを判定する(ステップS11)。この判定結果が肯定判定である場合、ECUは、路面が悪路から良路に変わったと判断し、モータを駆動させてホイールシリンダ内にブレーキ液を流入させる(ステップS13)。すると、各ブレーキパッドがブレーキロータに摺接する結果、ブレーキロータの各ブレーキパッドに対する傾斜が解消される。
(もっと読む)
制動制御装置
【課題】 被摩擦部材と摩擦部材との隙間が変化したとしても、正確に該隙間を詰めるプレチャージ制御を実行することが可能な制動制御装置を提供する。
【解決手段】 走行中においてアクセル操作もブレーキ操作も無く、減速度が安定した状態にてホイールシリンダに対するブレーキ圧力を徐々に増加させ、このブレーキ圧力の増加による減速度の増加を検出することによってブレーキパッドとディスクロータとの隙間がゼロになる圧力指示信号を取得し、記憶する。記憶された圧力指示信号に対応するブレーキ圧力をプレチャージ制御にて加圧することで、正確に隙間を詰めることが出来る。
(もっと読む)
車両の駐車制御装置
【課題】運転者により操作体が駐車位置へ操作された場合において、駐車ロック機構を可及的に速やかに作動させることができる車両の駐車制御装置を提供する。
【解決手段】遅延時間制御手段148により、シフトレバー32が予め設定された駐車ポジション(駐車位置)へ操作されてからシフト制御機構(駐車ロック機構)105により動力伝達機構である自動変速機6の出力軸24の回転がロックされるまでの遅延時間tDが出力軸24に蓄積された捩じりトルクTTWが大きくなるほど長くされるので、動力伝達機構の出力軸24に蓄積された捩じりトルクTTWが必要且つ十分に解放され、シフト制御機構(駐車ロック機構)105を可及的に速やかに作動させることができる。
(もっと読む)
車両の駐車制御装置
【課題】勾配がある路面に停車した車両において運転者により操作体が駐車位置へ操作された場合において、駐車ロック機構を速やかに且つ確実に作動させることができる車両の駐車制御装置を提供する。
【解決手段】制動手段150により、車両が位置する路面の勾配θSLが所定以上であり且つ駐車指令信号SPが発生させられているときは、制動装置36によって車輪26の回転が制動させられることから、路面傾斜によって車両が動くことがないので、勾配がある路面に停車した車両において運転者によりシフトレバー32が駐車ポジション(駐車位置)へ操作された場合において、駐車ロック機構としても機能するシフト制御機構105を速やかに且つ確実に作動させることができる。
(もっと読む)
車両の運動制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の運動制御装置を提供すること。
【解決手段】この装置では、カーブの形状に基づいて、カーブの途中の基準地点Pcrと、基準地点Pcrを車両が通過する際における適正車速Vqとが決定される。基準地点Pcrと適正車速Vqとに基づいて、基準地点Pcrから手前側の道路上にて車両の減速が行われる場合における道路上の位置に対する車速の減少特性の目標(目標車速特性Vt)が演算される。現在の車速Vxが、目標車速特性Vtから得られる車両の現在位置に対応する車速を超えた地点Pcsにて減速制御が開始される。車速Vxが適正車速Vqを含む所定範囲Hn内に達したとき(点G)に減速制御が終了される。減速制御の終了に続いて所定期間に亘って車両の加速を制限する加速制限制御が実行される。
(もっと読む)
61 - 80 / 103
[ Back to top ]