
Fターム[3D246HA27]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 燃料供給状態 (103)
Fターム[3D246HA27]に分類される特許
21 - 40 / 103
マップデータを使用する乗物ESCシステムのための方法及びシステム
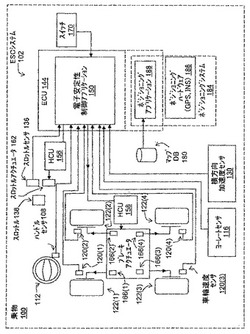
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両の運動制御装置

【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
内燃機関の制御装置
【課題】本発明は、検出されないシステム異常にも対処できる出力制御を提供すること、退避走行可能な出力制御を行うこと、うっかりミスなどの誤作動に配慮した高精度な判断を行う出力制御を提供すること、信頼性を高めることを目的としている。
【解決手段】このため、運転条件に応じて内燃機関に設けたスロットルバルブを目標開度になるようアクチュエータを駆動する電子スロットルシステムを備えた内燃機関の制御装置であって、運転条件に異常を検知した際にスロットル開度をリンプホーム開度として車両の退避走行を可能とする内燃機関の制御装置において、ブレーキ操作を検知するブレーキ操作検知手段を設け、制御装置は、異常検知の有無に関わらず、アクセルペダルの操作中に後からブレーキ操作が加わった場合、操作順序の成立に基づいて目標開度をリンプホーム開度とし、スロットル開度をリンプホーム開度にアクチュエータを駆動する。
(もっと読む)
路面状態判定装置及び車両の制御方法
【課題】路面状態を好適に判定可能にする。
【解決手段】路面状態判定装置33が、駆動輪3の空転の程度を表すスリップ値Sを測定するスリップ値測定手段41と、スリップ値測定手段41により測定されたスリップ値Sの変化率ΔSを演算する変化率演算手段42と、変化率演算手段42により演算されたスリップ値の変化率ΔSに応じて路面状態rを判定する判定手段43と、を備える。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定し、車両旋回状態にて各車輪の不要な前後スリップの発生を抑制しつつ小回り性を向上し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の基準位置(点O)が決定され、この基準位置から車両に近い側に車両の旋回中心(点P)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωptが演算される。この目標角速度と、旋回中心からの各車輪の距離Rpw[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され且つ小回り性が向上するように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づく。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
車両運動制御装置
【課題】加速旋回を含んだ走行状態にある車両の加速性を維持しつつ、車両を安定して走行させることが可能な車両運動制御装置の提供。
【解決手段】車両Mの駆動輪Wfl,Wfrの空転量が所定の閾値よりも大きい場合、ブレーキ制御ECU26は通常の空転抑制制御を実行し、空転傾向にある駆動輪Wfl,Wfrに制動力を付与する。車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回内側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも大きくし、旋回内側の駆動輪Wfl,Wfrへの制動力の付与を抑制し、その空転を許容する。また、車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回外側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも小さくし、外側の駆動輪Wfl,Wfrへの制動力の付与を増大させる。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両運動制御装置及び車両運動制御プログラム
【課題】簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を導出する。
【解決手段】記憶された自車両と目標位置との間の距離のx成分Xeとy成分Yeとの比で定めた第1のパラメータ、自車両の速度のx成分vx0とy成分vy0との比で定めた第2のパラメータ、及び目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を求めるために導入した第1の導入パラメータν1の関係を定めた第1のマップ、第1のパラメータ、第2のパラメータ、及び第2の導入パラメータν2の関係を定めた第2のマップ、並びに第1のパラメータ、第2のパラメータ、及び目標位置に到達する時刻teの関係を定めた第3のマップと、現在の自車両と目標位置との間の距離及び自車両の速度に基づいて演算された第1のパラメータ、第2のパラメータとを用いて車体合成力を導出する。
(もっと読む)
トラクション制御装置
【課題】トラクション制御によって駆動輪の制御を行いながらも、必要なときには適宜、トラクション制御が制限でき運転者の意思どおりにエンジン駆動力を車両の駆動輪に付与できる安全性の高いトラクション制御装置を提供する。
【解決手段】車両の駆動源から駆動輪FR、FLに伝達される駆動力を制限するトラクション制御装置において、駆動源から出力される駆動力を制御するために操作されるアクセルの操作量を検知するアクセル操作量検出手段64と、アクセル操作量検出手段64からの出力に基づいてアクセル操作の振動状態を演算するアクセル振動演算手段65と、アクセル振動演算手段65により演算されたアクセル操作の振動状態が大きいほどトラクション制御が介入しにくくなるようにトラクション制御の制御内容を変更するトラクション制御変更手段66と、を備える。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の減速走行時における駆動輪のロック傾向及びロック回復傾向を的確に判定して、駆動輪のロックを防止するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)の車輪回転速度(Vw)の変化率である車輪速度変化率(ΔVw)と、駆動輪(16,18)のスリップ率(Sw)とに基づき、駆動輪が(16,18)ロックする傾向にあると判定すると、電動機(6)をモータ作動させて電動機の(6)駆動トルクを駆動輪(16,18)に付与する一方、車輪速度変化率(ΔVw)とスリップ率(Sw)とに基づき、駆動輪(16,18)のロック傾向が解消しつつあると判定すると、電動機(6)を発電機作動させて電動機(6)の回生制動トルクを駆動輪(16,18)に付与する。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
21 - 40 / 103
[ Back to top ]