
Fターム[3D246HB21]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 天候、気温、昼夜 (56)
Fターム[3D246HB21]に分類される特許
1 - 20 / 56
電動パーキングブレーキ制御システム
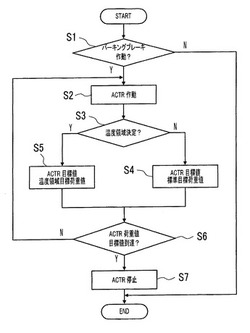
【課題】部品点数を増加させることなく、温度に応じた目標荷重値を設定することができる電動パーキングブレーキ制御システムを提供することを目的とする。
【解決手段】車両の車輪を制動するパーキングブレーキと、前記パーキングブレーキをコントロールケーブルを介して作動または解除するアクチュエータと、外気温センサと、荷重センサと、前記アクチュエータを制御する制御部とを備えた電動パーキングブレーキ制御システムであって、前記制御部は、連続する複数の温度領域に区分された温度領域情報に基づいて、前記外気温センサからの外気温の時系列において、前記パーキングブレーキの作動より以前の所定時間内における外気温が属する温度領域のうちの低温度側の温度領域を特定し、特定された温度領域に応じた目標荷重値まで到達するように前記アクチュエータの駆動を制御することを特徴とする電動パーキングブレーキ制御システムを用いる。
(もっと読む)
車両のエンジン自動停止制御装置

【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
制動力制御装置
【課題】ブレーキ液温度が低い場合、液圧応答性の改善による減速度応答性の向上と、違和感を低減したペダルフィールと、を両立させること。
【解決手段】制動力制御装置1は、ブレーキ操作量検出部7と、目標減速度演算部と、ブレーキ液温度推定部83と、目標減速度補正部80と、マスタシリンダ圧制御部8と、を備える。ブレーキ操作量検出部7は、運転者のブレーキ操作を検出する。目標減速度演算部は、運転者のブレーキ操作に基づき目標減速度を演算する。ブレーキ液温度推定部83は、ブレーキ液温度を推定により取得する。目標減速度補正部80は、ブレーキ液温度とブレーキ操作とから、ブレーキ液温度が所定の温度以下の場合、常温時の実減速度に近づくように目標減速度補正量を演算する。マスタシリンダ圧制御部8は、目標減速度を目標減速度補正量により補正した補正後の目標減速度に基づき、マスタシリンダ圧Pmcを発生する。
(もっと読む)
アイドリングストップシステムおよびアイドリングストップの方法
【課題】車両のアイドリングストップからのエンジンの再始動時にヒルスタートアシストを低コストで円滑に行えるアイドリングストップシステムおよびアイドリングストップの方法を提供する。
【解決手段】アイドリングストップシステムは、車両の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルの操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルの操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って制動制御装置6の作動条件を一時的に緩和する作動条件緩和手段6とを備える。
(もっと読む)
制動機構の作動状態判定装置
【課題】固着の発生した制動機構の作動状態を速やかに判定し、判定した作動状態を報知する制動機構の作動状態判定装置を提供する。
【解決手段】作動状態判定装置20の電子制御ユニット21は、ブレーキペダルストローク量検出センサ22によって検出されたブレーキペダルストローク量Hbとブレーキ液圧検出センサ23によって検出されたブレーキ液圧Pbとを入力する。そして、ユニット21は、入力したストローク量Hb及びブレーキ液圧Pbが、運転者によるブレーキペダルBの操作に伴って摩擦パッド13が固着の発生した状態によりディスクロータ11の摩擦面に変位する状況に応じて区画された固着領域に含まれるか否かを判定する。この判定により、ストローク量Hb及びブレーキ液圧Pbが固着領域に含まれるときは、ユニット21は、報知装置24を介して運転者に固着の発生した作動状態を報知する。
(もっと読む)
自動車用自動減速装置
【課題】実目標位置での目標速度に対する速度誤差を小さくし、運転者に与える違和感の少ない減速パターンを設定可能な自動車用自動減速装置を提供する。
【解決手段】目標位置P0での目標速度vtに向かって初めは大きい減速度a1で減速を行い、目標位置P0に向けて小さい減速度a2とすることにより実目標位置Prでの速度誤差Δvを小さくすることができる。自動ブレーキをかける際には、ナビゲーション装置での位置検出誤差を原因として目標速度vtに達する地点がばらつくことになるので、第2減速度a2に対応する低いGで誤差を感じないようにすることができる。最初は、第1減速度a1に対応する大きなGで、目標地点に近づいたらGを弱くしているので、違和感が低減される。
(もっと読む)
リターダの制御装置、車両およびリターダ制御方法、並びにプログラム
【課題】走行条件に係らず補助ブレーキとしての機能を充分に発揮させ、ECUの共通化を図ること。
【解決手段】リターダの動作中に生じる自車両の減速度を計算する補助ブレーキ力計算部71および減速度計算部72を有し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも小さいときには、所定の閾値を、放熱手段(ドラム)の回転速度の変化に対応させて可変的に設定し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも大きいときには、所定の閾値を、一定値に設定し、温度検出手段によって検出された放熱手段(ドラム)の温度が、回転速度検出手段によって検出された放熱手段(ドラム)の回転速度に対応する所定の閾値を超える温度であるときに、電気エネルギの発生を低減させる制御を行うリターダの制御装置を構成する。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
車両の走行装置の状態を評価するための方法と装置、車両に対するカーブ警告方法ならびにコンピュータプログラム製品
【課題】より効率的に車両の走行装置の状態を評価する。
【解決手段】ブレーキ制御システムの少なくとも1つの制御信号と、走行データを検出するための手段の出力信号とを結合し、結合信号を取得し、結合信号に基づき走行装置の状態を評価する。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
ブレーキ装置
【課題】バキュームブースタを備えたブレーキ装置において、バキュームブースタの助勢限界後アシスト制御が行われる場合に、良好にアシスト量減少制御が行われるようにする。
【解決手段】効き特性制御中に、マスタシリンダ液圧の減少勾配が設定勾配以上である場合に減圧条件が満たされたとされて、アシスト量減少制御が開始される。一方、アシスト量減少制御が開始されると再開禁止フラグがONとされるが、再開禁止フラグがONの間、効き特性制御の開始が禁止される。その結果、制御ハンチングを抑制することができ、運転者の操作フィーリングの低下を抑制することができる。
(もっと読む)
車両用制御装置
【課題】GPS受信装置が無くても大気圧センサの異常検出を行うことができるようにする。
【解決手段】前後加速度センサの検出信号に基づいて検出される勾配角度θや車輪速度センサの検出信号に基づいて演算される推定車体加速度dVに基づいて高度変化量を算出し、高度変化量から気圧変化量を推定する。そして、気圧変化量のセンサ値と推定値とを比較することにより、大気圧センサの異常を検出する。これにより、GPS受信装置が無くても大気圧センサの異常検出を行うことが可能となる。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】無駄な消費エネルギーを的確に提示することが困難であった。
【解決手段】回生ブレーキによる制動および摩擦ブレーキによる制動を行うことが可能な車両において前記摩擦ブレーキによる制動が行われたことを特定し、前記車両の周囲の状況を示す情報を取得し、前記車両の周囲の状況に対応するために必要とされる必要制動力を特定し、前記必要制動力が前記回生ブレーキの最大制動力以下である状態で前記摩擦ブレーキによる制動が行われた場合に当該摩擦ブレーキによって消費されたエネルギーを特定し、当該消費されたエネルギーを示す情報を案内する。
(もっと読む)
ナビゲーション装置
【課題】車体をカーブで走行させる際に、カーブの環境の変化や運転者の意識に対応して適正に報知を行うナビゲーション装置を構成する。
【解決手段】車体がカーブに接近した際に、カーブの半径に基づいてカーブでの適正走行速度を算出し、車体の走行速度が適正走行速度より高速である場合に、減速度設定手段28が車体の走行時における基準減速度を算出し、基準減速度が閾値を超えることを報知出力手段30が判別したタイミングで左振動体VLと右振動体VRを同時に駆動する等の報知を行う。
(もっと読む)
路面摩擦係数演算装置
【課題】路面摩擦係数演算装置に関し、車両の走行状態に関わらず、路面状況に対応する路面摩擦係数を算出する。
【解決手段】車両に作用する前後加速度を検出する前後加速度検出手段1と、該車両に該前後加速度が検出されない状態での定常走行継続時間を計測する計時手段2と、計時手段2で計測された該定常走行継続時間が第一所定時間以上となったときに、該車両に微少制動力又は微少駆動力を第二所定時間だけ付与する制動駆動力付与手段3と、該微少制動力又は該微少駆動力が付与された後に、該車両が走行する路面の摩擦係数を算出する路面摩擦係数算出手段4とを備える。
計時手段2は、路面摩擦係数算出手段4で該摩擦係数が算出されたときに該走行経過時間をリセットして再び該定常走行継続時間の計測を開始する。これにより、所定時間毎に周期的に路面の摩擦係数が算出される。
(もっと読む)
道路情報提供システムおよび情報配信装置搭載車両、情報収集装置
【課題】 中央管理装置からの情報や道路周辺に設けた雨量計等に基づいてスリップ情報等を提供していた既存の道路情報提供システムでは、変化する実際の路面の摩擦力を反映させていないので、漠然とした精度の低いスリップ情報の提供になっていた。
【解決手段】 任意の走行車両に搭載されたアンチロックブレ−キ装置の制御デ−タの記録を次々に採取し、この採取した制御デ−タを蓄積し、路面の摩擦力の変化を推定したり、スリップの発生状況を把握したりすることから精度の高いスリップ情報を提供できるようにした。
(もっと読む)
車両制御装置
【課題】横風を受けている場合に、その横風により生じるヨーモーメントを所望の大きさに制御することにより、車両の実挙動を目標挙動に近づける。
【解決手段】車両が横風を受けている場合に、ヨーモーメントを横力で割った値である比率xの目標比率x*を、実際の車両の挙動が目標挙動となる大きさに決定する。横風は、車両の形状で決まる着力点に作用するため、横風の強さに基づけば横風によって車両に作用する横風ヨーモーメントを取得することができる。そして、アクチュエータが、横風の強さと目標比率x*とを掛けた値である目標ヨーモーメントから横風ヨーモーメントを引いた値である制御ヨーモーメントが付与されるように制御される。その結果、車両の実挙動を目標挙動に近づけることができる。
(もっと読む)
運転支援システム
【課題】歩行者などに対する水跳ねが発生しないような浅い水溜りで不要な運転支援が実行されることを防止し、制御精度の向上が図られた運転支援システムを提供する。
【解決手段】路面の高度差に関する情報を取得する路面高度差取得手段11と、降雨を検出する降雨検出手段12と、降雨検出手段12が降雨を検出した場合において路面高度差取得手段11によって取得された路面の高度差が所定値以上である道路上の地点に、運転支援を行う運転支援手段13とを備える運転支援システム1とする。これにより、降雨の有無と路面の高度差とに応じて水溜りができる可能性の高い地点を判定し、この判定された地点に車両が接近する場合に運転支援を行うことが可能となる。その結果、水跳ねが発生しないような浅い水溜りに接近する場合における運転支援の実行を防止することができる。
(もっと読む)
車両用ブレーキ装置の制御装置
【課題】マスタシリンダ圧に加圧されるポンプアップ圧を発生させるポンプの容量を抑制しつつ、急減速の要求に対応できる車両用ブレーキ装置の制御装置を提供する。
【解決手段】マスタバックの倍力限界点までは、マスタシリンダ圧をホイールシリンダに供給し、前記倍力限界点以降は、ポンプによって発生させたポンプアップ圧のホイールシリンダに対する供給を制御することで、目標のホイールシリンダ圧が得られるようにする。ここで、非制動要求時で、マスタバックの負圧室の負圧が所定の負圧に達しておらず、前記倍力限界点が低下する条件の場合には、ポンプを駆動させて予めポンプアップ圧を発生させておくことで、ポンプ容量が比較的小さくても、倍力限界点以降においてポンプアップ圧による昇圧を応答良く行えるようにする。
(もっと読む)
情報提供装置及び情報提供方法
【課題】ユーザの運転操作による制駆動力の余裕度合いを提示する。
【解決手段】車両情報を取得する車両情報取得機能Aと、車両情報に基づいて、車両の制駆動力を算出する制駆動力算出機能Bと、車両情報に基づいて、制駆動力との対比において基準となる基準制駆動力を算出する基準制駆動力算出機能Cと、基準制駆動力に対する制駆動力の余裕度を求める余裕度導出機能Dと、算出された余裕度を提示する提示制御機能Eとを実行させる制御装置10を備える。
(もっと読む)
1 - 20 / 56
[ Back to top ]