
Fターム[3D246KA13]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | メモリ、記憶素子 (219)
Fターム[3D246KA13]に分類される特許
141 - 160 / 219
予防安全システムと予防安全システムの親局および子局、予防安全方法
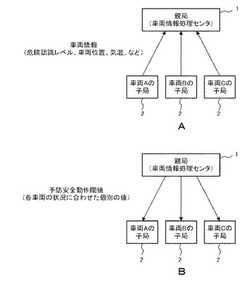
【課題】運転者の快適性と安全性の両立をはかる予防安全システムと予防安全システムの親局および子局、予防安全方法を提供する
【解決手段】車両ごとに搭載された車両自身の状況および車両の周辺環境の状況を計測するセンサ・測定装置と、車両に搭載されている運転者に安全か否かを通報するとともに運転者を保護する安全装置と接続される子局と、子局から送信されるセンサ・測定装置が計測した結果である安全関連情報を受信し、安全関連情報に基づいて統計解析を行い、安全装置に動作開始を示す安全装置の設定値を適時送信する親局と、を備え、子局は、センサ・測定装置の計測結果に基づいて生成した検出レベルが、予め設定した前記安全装置の設定値のレベルに同じまたはより大であれば、安全関連情報を記録部に記録するとともに親局に安全関連情報を送信する。
(もっと読む)
車両用ブレーキシステム

【課題】助手席の乗員によるブレーキ操作装置の操作によりブレーキが作用させられるブレーキシステムの不都合を解決する。
【解決手段】運転席側ブレーキ操作装置と助手席側ブレーキ操作装置とを含む液圧ブレーキシステムにおいて1以下のアシスト係数を設定し、助手席乗員による助手席側ブレーキペダルの踏込みにより得られる踏力に掛け、それにより得られる助手席側踏力と、運転者による運転席側ブレーキペダルの踏込みにより得られる踏力とのうち、大きい方の踏力に基づいて液圧制御弁装置のリニアバルブへの供給電流を決定する(S14〜S17)。助手席側踏力に基づいて液圧ブレーキが作用させられても、実際より減少させられた助手席側踏力に基づいて供給電流を決定することができるため、助手席乗員により運転者が意図しない制動が行われても、助手席乗員の操作に応じたブレーキの作用力が得られるとともに運転者が感じる違和感や不満が少なくて済む。
(もっと読む)
車両の走行安全装置
【課題】連続するカーブなど曲率が旋回中に変化する場合であっても曲率に応じた適正なブレーキアシスト制御が可能な車両の走行安全装置を提供する。
【解決手段】ブレーキ制御部30が、現在ブレーキアシスト制御中となるR1カーブに対する第1ブレーキアシスト量と、ブレーキアシスト制御中のR1カーブに続くR2カーブに対する第2ブレーキアシスト量とを比較し、より大きいブレーキアシスト量に基づいてブレーキ出力を増加させることを特徴とする。
(もっと読む)
車両のトラクション制御装置、及び車両のトラクション制御方法
【課題】車両の運転手による操作の簡易化を図りつつ、スリップ状態にある駆動輪に対して適切に制動力を付与できる車両のトラクション制御装置、及び車両のトラクション制御方法を提供する。
【解決手段】制動ECUは、運転手の要求に基づきエンジンから車輪に伝達される駆動力DWを演算し(ステップS11)、各車輪のスリップ量Slpを演算する(ステップS12,S13,S14)。続いて、制動ECUは、制動制御開始閾値KBPを上記駆動力DWが大きいほど小さな値に設定する(ステップS15)。そして、制動ECUは、演算したスリップ量Slpが、設定した制動制御開始閾値KBP以上であった場合(ステップS21が肯定判定)、車輪に制動力を付与する制動トラクション制御を実行する(ステップS22)。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において重要度の高いがタスクの待ち時間が長い場合に、待ち時間を短縮する。
【解決手段】複数の各タスクに、実行順序の優先度に応じて設定した初期重み値を与え、該初期重み値に基づく実行順序に従って前記複数のタスクを実行する車両制御装置において、各タスクの重要度に応じて重み付け値(W)を付与しておき、実行待ちタスクの待ち時間に基づいてタスクの実行順序の優先度を変更する。
(もっと読む)
ブレーキ制御装置
【課題】リニア制御モードとレギュレータモードとの間で制御モードを切り替えた際のブレーキフィーリングを向上する。
【解決手段】ブレーキ制御装置20は、ホイールシリンダ23と、動力液圧源30と、レギュレータ33と、ブレーキ操作部材の操作から独立してホイールシリンダの液圧を制御し得るホイールシリンダ圧制御系統と、ホイールシリンダ圧制御系統によりホイールシリンダ23の液圧を制御するリニア制御モードと、レギュレータ33からホイールシリンダ23に作動液を供給するレギュレータモードとを含む複数の制御モードから1つを選択して制動力を制御するよう設定されており、リニア制御モードとレギュレータモードとの間で制御モードを切り替える場合には、その切替の前に、ホイールシリンダ圧制御系統によりホイールシリンダ23の液圧をレギュレータ33の液圧に近づけるホイールシリンダ圧補正制御を行うブレーキECU70とを備える。
(もっと読む)
車両制御装置
【課題】ドライバの個人毎の好みに適合したタイミングで減速制御あるいは加速制御を実行することができる車両制御装置を提供する。
【解決手段】
自車の走行中に補正接近離間状態評価指標KdB_cを算出し、その補正接近離間状態評価指標KdB_cをその算出時の車間距離Dとともに運転者別に記憶装置60に記憶する。そして、記憶装置60に運転者別に記憶されている補正接近離間状態評価指標KdB_cの距離毎の最大値を求め(S10)、その最大値に基づいて、先行車との距離Dと距離毎の補正接近離間状態評価指標KdB_cの最大値との関係式を決定する(S20)。さらに、その関係式を補正することで、加減速制御の実行開始タイミングか否かを判別するための閾値を算出する速度制御開始判別式を決定する。
(もっと読む)
自動制動制御装置
【課題】制動制御の事後的な解析に有用な情報を、効率よく記録することができる自動制動制御装置を提供する。
【解決手段】自動動制動制御の制御情報を記録するデータ記録ユニット20の記録部21に複数の独立した記録領域を設け、各記録領域に個別の制御タイミングで制御情報を記録させる。具体的には、制動制御が実際に実行されたタイミングでの制御情報を記録する第2の記録領域21bのみならず、制動制御の実行を判定したタイミングでの制御情報を記録する第1の記録領域21aを設定する。これにより、制動制御が適切なタイミングで実行されなかった場合等においても、その原因等についての解析を的確に行うことができる。
(もっと読む)
制動装置
【課題】制動力を車両の対角線に配置された車輪に作用させることができるとともに、制動力を前輪制動力と後輪制動力とに配分を行うことができる制動装置を提供すること。
【解決手段】ブレーキオイルOILにマスタ圧PMCを付与するマスタシリンダ22と、FRシリンダ27aおよびRLシリンダ27bに加圧されたブレーキオイルOIL1を供給する第1系統25と、FLシリンダ27cおよびRRシリンダ27dに加圧されたブレーキオイルOIL2を供給する第2系統26と、保持ソレノイド弁25b,25cの上流側と、保持ソレノイド弁26bとFLシリンダ27cとの間とを接続する第1接続配管L18と、保持ソレノイド弁26b,26cの上流側と、保持ソレノイド弁25cとRLシリンダ27bとの間を接続する第2接続配管L28と、第1接続配管L18に設けられた第1切替弁25dと、第2接続配管L28に設けられた第2切替弁26dとを備える。
(もっと読む)
監視装置、電子制御装置
【課題】演算装置の動作状態を監視する監視装置において、監視必要時間を短縮すること、及び監視必要時間を短縮可能な監視装置を備えた電子制御装置の提供。
【解決手段】監視装置20では、制御マイコン11から回答信号が入力される毎に、その回答信号が交互に入力されるチェッカ30A,Bが、回答信号中の回答番号と、先に制御マイコン11に供給された対応番号の正答番号とを比較する。これと共に、比較結果を反映した宿題番号を、次番号として生成し、番号選択部23を経てシリアル通信部21に供給する。そして、シリアル通信部21が、制御マイコン11から回答信号を取得すると、番号選択部23から供給された宿題番号(次番号)を含む宿題信号制御マイコン11に出力し、その次番号に対応する演算を制御マイコン11に実行させ、さらに、回答信号を取得することで、上述したサイクルを繰り返し実行する。
(もっと読む)
回転制御装置
【課題】車輪等の負荷がかかった回転体の回転速度の変化を簡単な構成で検出できる回転制御装置を提供する。
【解決手段】接触路面による所定の負荷がかかった状態で回転するタイヤ2に2つのセンサユニット100A,100Bを180度回転対称な位置に装着し、それぞれのセンサユニットに備わる回転接線方向の加速度を検出する加速度センサの検出値を無線送信して、駆動制御ユニット200Aにより受信し、一方の加速度センサによって検出された回転接線方向の加速度の値と他方の加速度センサによって検出された回転接線方向の加速度の値との和の値を算出し、スタビリティ制御ユニット700によってこの加算値と予め設定されている所定の閾値とを比較し、比較結果に基づいてタイヤ2の回転駆動を制御する。
(もっと読む)
四輪駆動車の車体速推定装置
【課題】四輪駆動車に於いて各輪の車輪速に基づいて車体速の推定を行う車体速推定装置に於いて、直結四輪駆動状態にて走行時に、挙動制御により特定の車輪に制動力が付与されるときの車体速推定値の精度の悪化を低減すること。
【解決手段】本発明の装置は、各輪の車輪速値を取得する車輪速取得部と、各輪のうちの少なくとも一つの車輪に制動力を付与する車輪スリップ制御が実行される際には制動力が付与されない車輪の車輪速値を用いて車体速推定値を決定する車体速推定部とを含み、制動力が一部の車輪に付与されるとき、車体速推定値に於ける制動力が付与されない車輪の車輪速値の増大側の変化量の寄与が低減されることを特徴とする。
(もっと読む)
車両の運転支援装置
【課題】運転者固有の運転特性に応じた走行制御を行う。
【解決手段】運転支援装置は、走行路内における走行位置を検出する走行位置検出部1bと、基準ラインを走行路に応じて算出する通常時基準ライン算出部1cと、自車両Cが基準ラインに沿って走行するように走行制御を行う操舵制御部1dと、走行制御が行われていないときに、自車両Cの走行路上の走行軌跡を走行路の道路状況と併せて記憶する記憶部1hと、記憶部1hに記憶された走行路上の走行軌跡及び走行路の道路状況に基づいて、所定の道路状況ごとの、基準ラインに対する走行軌跡のオフセット率を抽出するオフセット率抽出部1iと、通常時基準ライン算出部1cによって走行路に応じて算出された基準ラインを、オフセット率抽出部1iによって抽出された道路状況ごとのオフセット率に基づいて、走行路の道路状況に応じてオフセットさせる通常時基準ライン補正部1kとを備えている。
(もっと読む)
車輪速度演算装置
【課題】車輪速度センサから出力されるパルス信号のエッジに基づいて、車輪速度を演算する車輪速度演算装置において、エッジが未検出である場合に、実際の車輪速度の変化を反映させつつ、そのエッジが未検出である間の車輪速度を推定することができる車輪速演算装置を提供すること。
【解決手段】車輪の推定移動距離Dnに基づいて、エッジが未検出である期間における車輪速度を推定する。この車輪の推定移動距離Dnは、エッジが検出された時点の車輪速度におけるトレンドの変化線の傾きAnを考慮して推定されるので、実際の走行に近い状態で距離を推定できる。そして、この推定移動距離Dnを用いて、次のエッジが検出されるタイミングを予測し、そのタイミングを考慮して、エッジが未検出である期間における車輪速度を推定すれば、その推定に、実際の車輪速度の変化を反映させることができる。
(もっと読む)
列車制御装置
【課題】ブレーキ力のばらつきが大きい場合にも、減速度推定の誤差を小さくして、列車を所定時刻に、所定位置に正確に停止させる。
【解決手段】緩解後の再減速開始時などに、一定時間、所定のブレーキをかけて、列車9を減速させながら、減速度を推定した後、推定結果に応じたノッチ指示(自動ブレーキ力指令)をブレーキ制御器12に供給して、ブレーキ装置13を動作させ、列車9を指定された時刻、指定された位置に停止させる。
(もっと読む)
生体情報生成装置、生体情報管理システム、車両制御装置
【課題】生体情報を生成可能な装置において、使用者一人一人の状況に応じた生体情報を生成すること。
【解決手段】生体情報生成処理では、医療情報を取得し(S130:YES)、その医療情報中の治療予定時刻に基づいて、治療予定時刻の前後の一定時間内での計測間隔が短い間隔となるように計測タイミングを設定する(S140)。そして、計測タイミングとなると、全種類の生体信号を計測して(S170)、それらの計測された生体信号それぞれ、及び血圧、心拍数を生体情報として生成し(S190)、今回の生体情報と前回の生体情報との差分(即ち、生体情報変化量)を算出する(S200)。その算出した生体情報変化量に基づいて、運転者の体調(S220)や治療内容が実行されたか否か(S270)を判定し、生体情報と体調判定結果と治療実行判定結果とを送信情報として医療機関設置装置群60に送信する(S300)。
(もっと読む)
車両走行支援装置、車両、車両走行支援プログラム
【課題】レーンマークの認識精度が低下した場合でも動作を継続させることができる車両走行支援装置等を提供する。
【解決手段】本発明の車両走行支援装置10によれば、レーンマークの確度が高いほど、操舵装置14等の動作の制御度合が高く設定される。これにより、レーンマークにより画定される走行領域の確度が高い状態では、車両1がこの走行領域から外れないような車両1の走行が比較的強くまたは積極的に支援される。その一方、レーンマークの確度が低いほど、操舵装置14等の動作の制御度合が低く設定される。これにより、レーンマークにより画定される走行領域の確度が低い状態では、車両1がこの走行領域から外れないような車両1の走行が比較的弱くまたは消極的に支援される。
(もっと読む)
車間距離制御装置
【課題】交通事故を未然に防ぐことができる車間距離制御装置を提供すること。
【解決手段】車間距離制御装置は、自車の位置を示す自車位置情報を衛星通信により取得する。自車の周囲に他車が存在する場合、他車に搭載された車間距離制御装置に対して無線通信を行い、他車の位置を示す他車位置情報を全て取得する。地図を表す地図データベースを参照して、全ての他車位置情報の中から、自車の前後に存在する特定他車の位置を示す特定他車位置情報を特定する。自車位置情報が示す位置と特定他車位置情報が示す位置とに基づいて、自車と特定他車との距離を表す車間距離を算出する。自車の速度を計測し、速度と適切な車間距離とを対応付ける距離データベースを参照して、自車の速度に対応する適切な車間距離として検索適切車間距離を検索する。車間距離が検索適切車間距離よりも短い場合、その旨を表す注意情報を自車の運転手に通知する。
(もっと読む)
制動力配分制御装置
【課題】積載状態が大きく変化した場合のように各輪の分担荷重比が正しく推定できなくても、制動力が低下して制動距離が伸びることを防止できるようにする。
【解決手段】
4輪のうち車輪スリップが最大の車輪である最大スリップ輪を決定したのち、最大スリップ輪の車輪スリップと制御の対象輪の車輪スリップとの差を演算し、その差に応じた各輪目標制動力補正量を設定する。具体的には、その差が規定値を超えていれば各輪目標制動力補正量の前回値に対して一定増加量を加算することにより各輪目標制動力補正量を増加させ、超えていなければ各輪目標制動力補正量の前回値をそのまま用いることで、車輪スリップの差に応じた応答性にて各輪の車輪スリップが最大スリップ輪の車輪スリップに近づくように目標制動力を高める。
(もっと読む)
141 - 160 / 219
[ Back to top ]