
Fターム[3D246KA13]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | メモリ、記憶素子 (219)
Fターム[3D246KA13]に分類される特許
121 - 140 / 219
車両制御装置および車両制御方法

【課題】回避すべき対象物を発見した場合等の緊急回避が要請される場合に、精度を担保しつつ限られた時間内に演算を完了させることができる車両制御装置および車両制御方法を提供することを課題とする。
【解決手段】本発明は、検出部を制御して回避すべき対象物を検出し、対象物までの距離を計測し、計測された距離に基づいて、制動回避または操舵回避を選択し、制動回避が選択された場合には条件式として前後方向のみの変数をもつ式を設定し、操舵回避が選択された場合には条件式として左右方向のみの変数をもつ式を設定し、設定された条件式に基づいて車両の将来の走行軌跡を演算することを特徴とする。
(もっと読む)
車両用加減速制御装置及びその方法

【課題】ナビゲーションシステムによる経路誘導の終了によりカーブ手前で減速制御が終了する場合でも、該カーブに対して有効に減速させる。
【解決手段】車両用加減速制御装置は、ナビゲーション装置14による車両の経路誘導時に、その誘導経路を基に、車両前方のカーブを検出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が検出したカーブに対応して車両を減速制御する目標車速演算部42等と、車両からみてナビゲーション装置14の経路誘導終了地点よりも遠方に制御対象のカーブが存在するときには、減速制御の制御内容を、該経路誘導終了地点に対応したものに変更する目標車速指令値演算部45と、を備える。
(もっと読む)
接触防止装置及びこの接触防止装置を組み込んだ駐車支援装置
【課題】適切に作動する接触防止及びこの接触防止装置を組み込んだ駐車支援装置装置を提供する。
【解決手段】駐車支援装置部品Pは、ECU10に接続されている。ECU10には、車両7の運転者に警報を発する接触防止手段13と、駐車区画の壁Wや障害物等と車両7との間の距離を検出する距離検出手段14とが接続されている。ECU10は、車両7と物体Wとの間の距離についての変更可能な設定値である警戒距離を記憶する警戒距離記憶手段11と、警戒距離を変更する警戒距離変更手段12とを備えている。カメラ1がマークMの画像を撮影することによって、車両7を駐車区画S内において一方の壁Wにできるだけ近づけた状態で駐車させることをECU10が認識した場合には、ECU10は警戒距離変更手段12を作動させて警戒距離記憶手段11に記憶されている警戒距離の値を、より小さい値(車両7と壁Wとの間の距離よりも短い距離)に変更する。
(もっと読む)
液圧ブレーキ装置
【課題】ブースタ効き特性制御において運転者のブレーキフィーリングの低下を抑制する。
【解決手段】ブレーキペダルの操作ストロークとマスタシリンダ圧との関係において、マスタシリンダ液圧の増加勾配が変化した場合に、ブースタが助勢限界に達したとされる。ブースタが助勢限界に達した場合のマスタシリンダ液圧と定常状態のブースタ負圧との複数の組に基づいて、ブレーキ操作前のブースタ負圧と助勢限界時液圧との実際の関係が取得される。その実際に取得された関係を利用して、ブースタが助勢限界に達したことが検出され、ブースタ効き特性制御が行われる。その結果、ブースタ効き特性制御を適切な時期から開始させることができ、運転者のブレーキフィーリングの低下を抑制することができる。
(もっと読む)
車両制御装置とブレーキ電子制御装置と電動パワーステアリング装置
【課題】車両が搭載するバッテリの消耗を低減した車両制御装置等を実現することを目的とする。
【解決手段】車両に搭載されたバッテリ800を用いて車両を電気的に制御する車両制御装置100において、検知した車両状態に基づき車両の制御の迅速性が必要ではないと判断される場合に、バッテリ800の電流消費を低減するように、制御の通電量を抑制する車両制御装置100とする。好ましくはホイールシリンダを増圧する増圧弁を通電制御して要求制動力に対応する液圧を供給するブレーキ電子制御装置においては、検知した車両の状態に基づき要求制動の迅速性が必要ではないと判断される場合に、増圧弁への通電量を抑制するブレーキ電子制御装置とする。
(もっと読む)
制動装置および制動装置の制御方法
【課題】ペダルフィーリングの悪化を抑制する制動装置および制動装置の制御方法を提供すること。
【解決手段】制動装置1は、設定された要求制動力BF*から運転者のブレーキペダルの操作に応じてブレーキオイルに付与されたマスタシリンダ圧PMCにより発生する操作圧力制動力を引いた値を回生要求制動力BFr*としてハイブリッド制御装置4に送信する。予測部29hが車速Vが所定値Vo以下と判定し、回生要求制動力BFr*と回生要求制動力BFr*に基づいて回生制動装置3が実際に回生制動を行った際の実効回生制動力BTKとの加圧可能差分の減少が予測されると、加圧手段が加圧可能差分である加圧圧力制動力BFppに基づいてブレーキオイルに加圧圧力Ppを付与し、加圧圧力制動力BFppを発生する。
(もっと読む)
車両制御装置
【課題】電気ブレーキから空気ブレーキへの切替によってブレーキ力が急変するような場合であっても、空気ブレーキへの切替後にブレーキの効き具合を迅速に検知することができ、その結果として停止位置の精度を向上させることができる定位置停止制御装置1を提供する。
【解決手段】定位置停止制御装置1は、電気ブレーキから空気ブレーキへの切替速度域において、ブレーキ指令決定手段25によるブレーキ指令を保持する。これにより、定位置停止制御装置1は、空気ブレーキの立ち上がり完了時に、前記ブレーキ指令に対して整定状態となる制御するとともに、空気ブレーキの立ち上がり完了後に短時間で空気ブレーキの効き具合を検知できるように制御する。
(もっと読む)
ブレーキ制御装置
【課題】コストを抑制しつつ、滑らかなブレーキ制御を実現する。
【解決手段】制御周期が異なる複数のモジュールを備えるブレーキ制御装置において、第1モジュールは、第1制御周期で第1制御目標値を出力する。第2モジュールは、第1モジュールから出力された第1制御目標値にもとづいて第2制御目標値を第1制御周期より短い第2制御周期で演算する。目標変化値算出手段は、第1制御目標値が更新された場合、第1制御目標値にもとづいて新たな目標変化値を算出し、第1制御目標値が更新されなかった場合、前回算出された目標変化値を新たな目標変化値とする。第2制御目標値算出手段は、第1制御周期と第2制御周期との基本周期比をもとに調整された調整周期比によって新たな目標変化値を補正し、補正された目標変化値にもとづいて新たな第2制御目標値を算出する。
(もっと読む)
自動制動制御装置、衝突判定方法および車両ならびにプログラム
【課題】自動制動制御装置において、簡単かつ確実に短時間で衝突判定を行うこと。
【解決手段】障害物との衝突を検出する衝突判定装置3と、この衝突検出装置3により衝突が検出されたときには車両を制動する制動制御手段と、を備える自動制動制御装置において、衝突検出装置3は、加速度センサ2により計測された加速度の絶対値の大きさを判定する第1の判定手段である加速度判定部10と、加速度センサ2により計測された加速度の微分値の大きさを判定する第2の判定手段である微分値判定部11と、加速度センサ2により計測された加速度の積分値の大きさを判定する第3の判定手段である積分値判定部12と、第1、第2、第3の判定手段による判定結果のいずれもが所定の条件を満たすときに衝突発生と判断する衝突判定手段である衝突判定部13と、を備える。
(もっと読む)
車両運転装置
【課題】 様々な条件で走行する車両に対して、種々の走行状態あるいは周囲環境に対応する動特性モデルを選択することができ、適切な動特性モデルにより定位置停止制御の精度を向上させることができる。
【解決手段】 車両運転装置としての自動列車運転装置2は、車両としての列車1の運転を制御するための複数の動特性モデルを保持する動特性モデル保持部を有している。自動列車運転装置2は、複数の動特性モデルのうち当該車両の走行状態あるいは周囲環境を監視する動特性モデル切換部を有する。自動列車運転装置2の動特性モデル切換部は、上記のような監視の結果として得られる当該車両の走行状態あるいは周囲環境に応じた最適な動特性モデルを適宜選択する。自動列車運転装置2は、上記動特性モデル切換部が選択した最適な動特性モデルに基づいて制御指令部が当該車両の走行を制御する。
(もっと読む)
停止制御装置
【課題】電気ブレーキと空気ブレーキとの切り替わったタイミングを正確に推定し、駅定点停止制御において使用すべきブレーキモデルを誤判断無く適切に選択して精度のよい駅定点停止制御を行う停止制御装置を提供する。
【解決手段】ブレーキモデル選択情報に基づき列車を目標とする地点に停車させるための停止制御に必要なブレーキノッチ指令を生成して出力する駅定点停止ノッチ制御部6とを備え、ブレーキモデル判断部20は、列車の速度を検出する列車走行速度検出部1と、速度を微分することにより減速度を算出する減速度演算部2と、減速度の波形を微分することによりジャーク波形を算出するジャーク演算部3aと、ジャーク波形に基づき電気ブレーキと空気ブレーキとの切替が発生したか否かを判断する電気ブレーキ/空気ブレーキ切替発生判断部4と、切替の判断結果に基づきブレーキモデルを選択するブレーキモデル選択部5とを有する。
(もっと読む)
車両の制御装置および車両の制御方法
【課題】インバータのスイッチング素子の過熱を防止しつつ、ヒルホールド時の停止維持を実現する車両の制御装置を提供する。
【解決手段】制御装置は、スイッチング素子Q3〜Q8の温度を検出する温度センサ31〜36と、温度センサ31〜36の出力に応じてスイッチング素子を保護するためにモータM1の出力トルクを制限するように制御を行なう制御部30とを備える。制御部30は、車両が傾斜路上に停止中であると判断し、かつスイッチング素子の温度の上昇に伴いモータの出力トルクを制限している場合には、モータの駆動軸にブレーキをかけるように、運転者がブレーキペダルを操作していなくてもブレーキ44を作動させる。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線の認識度が低くても、運転者の運転を支援する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】予め設定した所定時間後の自車両の将来の横位置を予測する。その予測した自車両の将来の横位置が、車線区分線を基準として予め定められた所定の車線幅方向位置よりも自車線中央側からみて外側に位置すると判定すると、自車線中央側に向かうヨーモーメントを車両に付与するように車両制御を開始する。このとき、前記車線区分線を検出できない若しくは認識度が低い場合には、車線区分線を正常に検出しているときと比較して、前記制御を抑制する。
(もっと読む)
制動力保持制御装置
【課題】発進補助制御を行う際に、ドライバに板感を与えることを防止してブレーキフィーリングの向上を図る。
【解決手段】発進補助制御処理において、発進補助制御の開始条件を2つに分け、車両停止時よりもブレーキペダルBPが踏み込まれてマスタシリンダ圧が上昇したときに発進補助制御の実行許可を出し、その後、ブレーキペダルBPが戻されたことが確認されると発進補助制御の実行開始する。このように、ブレーキペダルBPが戻されたときに初めて発進補助制御の実行開始としているため、発進補助制御の実行により電磁開閉弁SMCFおよび電磁開閉弁SRECが遮断状態にされたとしても、その後にブレーキペダルBPが踏み込まれることがない。このため、ブレーキペダルBPを踏み込んだときに発進補助制御を実行する際のような板感をドライバに与えないようにすることができる。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態の速やかな解消を補助できる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態にある場合には、前輪の車輪速度VWFを調整すべくアクセル操作を運転手が行うことを契機にグリップ力回復制御が実行される。すなわち、転舵輪である前輪は、その車輪速度VWFが運転手によって調整されつつ、その転舵角σの絶対値が一時的に小さくなるように調整される(第3タイミングt3)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第4タイミングt4)。
(もっと読む)
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】商用車両の動きをいち早く運転者に通知することを課題とする。
【解決手段】車両制御装置は、例えば、商用車両としてバスを検知した場合には、自車両に搭載されるナビゲーション装置から地図データおよび走行予定ルートデータを取得して、自車両の近傍にバスの停留所が存在するかを検索する。そして、自車両の近傍にバスの停留所を検索した場合には、車車間通信などによりバスから路線運行図を取得して、自車両周辺に検知されたバスが自車両の近傍に検索された停留所に停車するか否かを判定する。判定の結果、自車両周辺に検知されたバスが自車両の近傍に検索された停留所に停車する場合には、検知されたバスが自車両の近傍で停車する可能性がある旨のメッセージをドライバに報知する。
(もっと読む)
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】自車両の進路または進路近傍に存在する障害物を確実かつ安全に通過させるように自車両を制御することを課題とする。
【解決手段】車両制御装置は、例えば、各種レーダからの入力に基づいて、自車両の進路または進路近傍に障害物を検知すると、検知された障害物に関する障害物情報、および自車両に関する自車両関連情報を各種レーダ等から取得する。障害物情報および自車両関連情報の取得後、車両制御装置は、検知された障害物を安全に通過できるか否かを判定する通過判定を実行する。具体的には、各種レーダ等から取得した障害物情報および自車両関連情報を用いて、自車両の運転者や同乗者が、安全と感じる程度以上の距離を障害物と自車両との間で保てるか否かを基準とした判定を行う。
(もっと読む)
車両制御装置
【課題】安全装置が同一地点で所定回数作動する場合に、安全装置の誤作動を適切に防止する。
【解決手段】PCSシステム2に設けられたDSS_ECU4のPCS作動部11は、ミリ波センサ5から送信された障害物情報に基づいて、検出された障害物との衝突可能性を判断し、衝突可能性があると判断すると、PCSを作動させ、ブレーキECU6、体感警報装置7、警報表示装置8及び警報音発生装置9に衝突回避制御を行わせる。そして、DSS_ECU4の作動可否部12は、同一地点においてPCSの作動が所定回数以上あると、運転者の禁止操作に基づいて、PCS作動部11によるPCSの作動の可否を判断する。このため、このため、例えば、路上周辺の構造物を路上の障害物として誤検出しているなど、PCSが同一地点において所定回数作動する場合に、PCSシステム2の誤作動を適切に防止することができる。
(もっと読む)
電子制御液圧ブレーキ装置
【課題】制動力の電子制御時にマスターシリンダ液圧が変動して、この液圧を基に求める目標減速度の変化で、意図しない減速度変化が生ずるのを防止する。
【解決手段】左右輪制動力差による車両挙動制御(VDC)の介入時t2におけるマスターシリンダ液圧PmcをPmcoとしてメモリし、VDC制御量であるVDC対象車輪のホイールシリンダ液圧上昇量ΔPwc1を読み込む。このΔPwc1と、液圧剛性とから、マスターシリンダ液圧変動量ΔPmc1を推定し、PmcoからΔPwc1を差し引いて、VDC対象車輪のVDC後ホイールシリンダ液圧Pmco'(=Pmco−ΔPwc1)を求め、このPmco'に対応する目標減速度(目標制動力Tbo1)を演算する。VDC介入時マスターシリンダ液圧Pmcoに対応する目標減速度(目標制動力Tbo2)を演算し、この目標減速度(目標制動力Tbo2)と、目標減速度(目標制動力Tbo1)との偏差ΔTbo1だけ、目標減速度(目標制動力Tbo)を嵩上げ補正する。
(もっと読む)
自動車操作システムの診断を実施する方法および装置
自動車操作システム(1)から発信されるデータを記録する装置は、揮発性メモリと、不揮発性メモリと、データ記録モジュール(8)とを備えており、操作システム(1)によって発信される作動状態に関する信号を受信可能であって、作動状態信号の立ち上がりエッジで揮発性メモリの第1の領域に、作動状態信号の立ち下がりエッジで揮発性メモリの第2の領域に、それぞれデータを記録することができ、更には、作動状態信号を受信可能であって、作動状態信号により立ち下がりエッジ上に記録するコマンドを起動することができる記録操作モジュール(5)を備えており、前記記録モジュール(8)は、更に、記録コマンドを受信可能であって、記録コマンドが起動されている場合、不揮発性メモリの領域に揮発性メモリの2つの領域の内容を記録することができる。 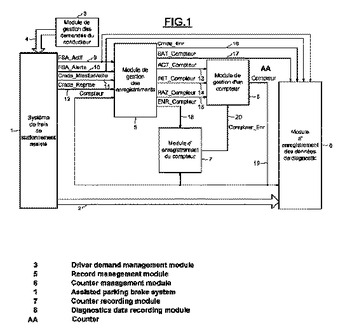 (もっと読む)
(もっと読む)
121 - 140 / 219
[ Back to top ]