
Fターム[3D246KA13]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | メモリ、記憶素子 (219)
Fターム[3D246KA13]に分類される特許
201 - 219 / 219
車線逸脱防止装置

【課題】運転者に違和感を与えないタイミングで車線逸脱防止制御を制限する。
【解決手段】車線逸脱防止装置は、走行車線に対して車両の逸脱傾向が高くなったと判定した場合、走行車線に対して車両が逸脱するのを防止する車線逸脱防止制御を行うものであり(ステップS5、ステップS10)、車両が走行車線に対し、該走行車線の外側方向になすヨー角を取得し(ステップS3)、その取得したヨー角が、所定のしきい値以上になった場合、車線逸脱防止制御を制限する(ステップS7)。そして、所定のしきい値を、車速及び走行車線の車線幅のうちの少なくとも一方に応じて補正する(ステップS6)。
(もっと読む)
分岐路進入判定装置

【課題】分岐路が存在することを的確に検出し、自車両が検出した分岐路に進入することを的確に判定可能な分岐路進入判定装置を提供する。
【解決手段】分岐路進入判定装置1は、自車両MCの左側および右側の車線Ll、Lrを検出する車線検出手段2と、検出された車線の自車両の進行方向の実空間上の長さと幅とを検出する長さ幅検出手段3と、長さ幅検出手段3による検出結果に基づいて車線の線種を判定するとともに自車両が走行している走行レーンの区分を判定する走行区分判定手段4と、実線であった車線が所定の長さおよび所定の幅の破線BLに変化した場合に変化した車線の側に分岐路Bが存在することを検出する分岐路検出手段5と、分岐路が検出されている間に自車両が分岐路に向かう移動または分岐路方向にウィンカ操作が行われた場合に自車両が分岐路に進入すると判定する分岐路進入判定手段6と、を備える。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】車両の走行挙動に応じて、危険走行領域を回避して交差点で安全に車両を停止させ又は通過させる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間などに基づいて、自車両が交差点の手前に停止するための停止条件及び交差点に進入するための進入条件により決定される危険走行状態にあるか否かを判定する。車載装置は、危険走行状態にあると判定した場合、運転操作履歴に基づいて、交差点で停止するか又は交差点を通過するかを判定する。車両を停止させる場合には、車両を緩やかな減速度で減速するための処理を行い、車両を通過させる場合には、車両を緩やかな加速度で加速するための処理を行う。
(もっと読む)
衝突緩和装置
【課題】車両が衝突する際の被害を緩和させる車両用の衝突緩和装置において、自動ブレーキが作動したときに乗員にとって車両の乗り心地が悪くなること防止できるようにする。
【解決手段】PCSにおける衝突緩和コントローラは、レーダセンサにより検出された障害物と車両とが衝突すると判定された場合に、予め設定された加速度勾配に沿って、被制御対象(ブレーキ)を作動させる際の設定加速度を繰り返し設定する。そして、衝突緩和処理の度に設定された設定加速度で被制御対象を作動させる。従って、設定加速度が加速度勾配に沿って設定されるので、突然、設定加速度が大きく変更される場合(破線参照)と比較して、車両の加速度の変化を小さくすることができる。よって、自動ブレーキが作動したときに乗員にとって車両の乗り心地が悪くなってしまうこと防止することできる。
(もっと読む)
電気ブレーキシステムを有する航空機のためのパーキングブレーキ制御
電気ブレーキシステムを備えた航空機のためのパーキングブレーキを設定するためのシステムおよび手順を開示する。パーキングブレーキの電気的作動は、この明細書中に記載されるとおり、従来の液圧ブレーキシステムのパーキングブレーキを係合するために実行される一連のイベントに沿ったものとなっている。電気的作動プロセスでは、ブレーキペダル偏差データおよびパーキングブレーキレバー状態データが取得され、受信されたデータに基づいてパーキングブレーキ機構を設定すべきかどうかが決定される。電気ブレーキアクチュエータが設定されると、電気ブレーキシステムは、押下げられた位置にあるブレーキペダルを物理的にロックまたはラッチする必要なしに、ブレーキアクチュエータを適所に保持するよう摩擦ブレーキを係合する。  (もっと読む)
(もっと読む)
トレーラと空気式に連結可能な商用車のためのブレーキ装置および故障時におけるその種のブレーキ装置の作動方法
本発明は、トレーラと空気式に連結可能な商用車のためのブレーキ装置に関する。ブレーキ装置は、少なくとも1つの電子制御ユニット(10,12,14,16,18)と、この少なくとも1つの電子制御ユニット(10,12,14,16,18)によって電気的に切り替え可能な弁装置(20)とを有し、少なくとも1つの弁装置(20)の1つの切り替え状態においては、トレーラを制動させるトレーラブレーキ装置用の圧力が形成される。絞り弁(36,38)がトレーラ制御線(48’,50’)内に配置されており、絞り弁(36,38)はこの絞り弁(36,38)の上流側において漏れが発生した際に、開放弁(54)の制御入力側(52)における圧力降下を制限する。さらに本発明は、ブレーキ装置の制御方法に関する。  (もっと読む)
(もっと読む)
ブレーキ制御装置
【課題】制御弁における異音の発生を抑制する。
【解決手段】ブレーキ制御装置20は、動力液圧源30と、ホイールシリンダ23と、動力液圧源30を利用して運転者の操作入力に応じて作動液を調圧しホイールシリンダ23へと送出するレギュレータ33と、ホイールシリンダ圧がレギュレータ33により増圧されるときに閉弁状態の当該弁を開弁させる方向に作用する力が増加するように配置されている減圧リニア制御弁67と、減圧リニア制御弁を閉弁状態としレギュレータ33からホイールシリンダ23に作動液を供給するレギュレータモードを含む複数の制御モードから1つを選択して制動力を制御するよう設定されており、レギュレータモードにおいて減圧リニア制御弁に作用する液圧を、閉弁状態の減圧制御弁を開弁させる液圧である開弁圧よりも低圧となるよう制御するブレーキECU70と、を備える。
(もっと読む)
走行支援装置
【課題】運転者が車両の運転を行うことに適さない状態にある場合、運転を継続することをできるだけ防止することができる走行支援装置を提供する。
【解決手段】走行中の自車の運転者の体調情報が予め定められた体調不良状態を示す場合に、取得した自車の周囲状態または走行路状態を反映した車外状態情報に反映される自車の周囲状態または走行路状態に応じた内容にて当該自車の非常制動制御を実行する走行支援装置として提供可能である。
(もっと読む)
車両用ブレーキ制御装置
【課題】 ソレノイドバルブの過熱を防止してブレーキ制御性能を確保しつつ、ブレーキ制御に用いられる記憶装置の寿命を延ばすことができる車両用ブレーキ制御装置を提供すること。
【解決手段】 コントロールユニットECU1の出力により駆動されるソレノイドバルブによりホイルシリンダW/C内の圧力を増減圧可能な車両用ブレーキ制御装置において、コントロールユニットECU1は、ソレノイドバルブの温度(コイル温度Tc)を推定するソレノイドバルブ温度推定手段(図4のステップS13〜S18)と、上記推定された温度(コイル温度推定値Tc)が所定の閾値(書き込み温度Tn)を跨いだときにのみ所定の温度情報を記憶媒体1に記憶する記憶手段(図4のステップS19、S20)と、上記記憶された温度情報を用いて次回のイグニッションスイッチオン時のソレノイドバルブの温度(コイル温度Tc)推定の初期値(コイル温度初期値Tc0)を設定する初期値設定手段(図3のステップS2〜S12)と、を備えた。
(もっと読む)
走行支援制御システム、及び走行支援の制御方法
【課題】レーダ装置で物標の検出を開始してから、走行支援制御が実施されるまでの時間を短縮可能な走行支援制御システムの提供。
【解決手段】走行支援制御システムは、走行支援ECUと、レーダ波を送受信することにより、物標を認識するレーダセンサとを備える。レーダセンサにて物標候補を検出し、それら物標候補毎に検出情報を生成する度に、それらの検出情報に未確定、もしくは確定情報を付与した物標情報をレーダセンサから走行支援ECUへと送信する。走行支援ECUでは、レーダセンサにて、それらの物標候補が確定物標として確定される前に、レーダセンサから取得し蓄積した検出情報の履歴を用いて物標挙動を推定し、レーダセンサから確定情報を取得されると、その確定物標であるとされた物標候補に対する物標挙動の中で規定条件を満たす対象物標の推定挙動に従って走行支援制御を実行する。
(もっと読む)
追従制御装置
【課題】 周辺環境に適した車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、車両に搭載されたECU2を備えている。ECU2は、メモリ部13に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定する車間距離設定部15と、前方レーダ9及び後方レーダ10の検出信号に基づいて、自車両と周辺車両との車間距離等を求める周辺車両検出部16と、自車両と周辺車両との車間距離等に基づいて、周辺車両の走行状態に応じた車間距離を求める車間距離設定部17と、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求める目標車間距離設定部18と、目標車間距離に応じて速度を制御する速度制御部20とを有している。
(もっと読む)
軌道上移動体制御装置および進出方向検出装置
【課題】GPS観測を利用した軌道上を移動する移動体制御において、観測誤差により隣接する他の軌道に存在する移動体や停止目標による誤警報、誤ブレーキを回避する。
【解決手段】移動体制御装置100を、コントローラ108、GPS受信機113、他移動体の移動体制御装置と送受信する無線機115、ブレーキ107及び警報ユニット109を備えて構成し、コントローラを自移動体が走行している線別、線路名称等の軌道情報を記憶する手段及び他移動体又は停止目標と自移動体の軌道情報を比較する手段を備えて構成した。
(もっと読む)
パーキングブレーキ非常解除装置を備えたパーキングブレーキ装置、並びにパーキングブレーキ非常解除方法
本発明は、商用車の空気圧式のブレーキシステムのためのパーキングブレーキ装置(10)であって、制御装置(12)を備え、該制御装置(12)を介して、パーキングブレーキ(20,22)の締結及び解除を行うために、パーキングブレーキ操作装置(14,16,18)が制御可能であり、パーキングブレーキ非常解除装置(24)を備え、該パーキングブレーキ非常解除装置(24)がパーキングブレーキ操作装置(14,16,18)の故障時に、パーキングブレーキ(20,22)の解除のために働く、商用車の空気圧式のブレーキシステムのためのパーキングブレーキ装置に関する。本発明によれば、パーキングブレーキ非常解除装置(24)は、制御装置(12)から独立して制御可能であるようになっている。更に、本発明はパーキングブレーキ装置を制御する方法に関する。 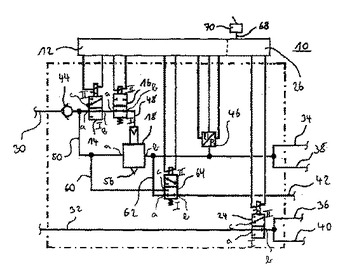 (もっと読む)
(もっと読む)
ブレーキ機構ユニットを制御するために与えられる操作力の適合化のための制御システム
ブレーキ機構ユニットの制御のために与えられる操作力(F)の適合化のため、制御システムに、操作力(F)の発生のための電子装置(EGE)が設けられ、電子装置(EGE)は制御ユニット(SU)により制御可能である。制御ユニットが、発生される操作力(F)を低下させる少なくとも1つの事象(E1〜E9)の発生を監視すべく構成され、少なくとも1つの事象(E1〜E9)の発生時、発生される操作力(F)が少なくとも1つの予め与えられた目標操作力(Fsoll)と比較され、比較結果に応じて制御ユニット(SU)によって制御信号(ss)が発生され、制御信号(ss)が操作力(F)の適合化のために電子装置(EGE)に入力される。  (もっと読む)
(もっと読む)
下り坂の運転中に自動車両の制動を制御するシステム及び方法
下り坂運転中に自動車両の制動を制御するシステムであって、車両が常用摩擦制動装置18と、リターダ・ブレーキ26及び車両の運転者によってリターダ・ブレーキを始動させるためのレバー40を備える補助制動装置25とを含むシステムが、車両の運転条件のパラメータの値に基づいて、下り坂運転時に車両に制動作用を適用するために、運転者がレバー40を作動させることによりリターダ・ブレーキ26を始動させる際に、補助制動装置のみで車両に適用される制動作用を得ることができるかどうかを計算するように適合されている手段29を含む。その計算が補助制動装置のみでは車両に適用される制動作用を得ることができないことを示す場合に、制動制御手段28が、補助制動装置を助けるために常用摩擦制動装置を始動させるように適合されている(図1)。 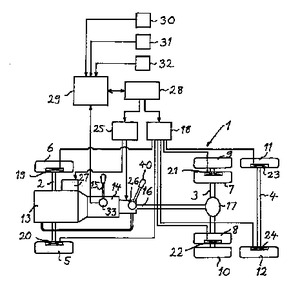 (もっと読む)
(もっと読む)
圧力制限弁によるブレーキ圧力の制御装置および方法
【課題】圧力設定の精度が本質的に改善され、これにより希望の目標圧力をより正確に達成可能な方法および装置を提供する。
【解決手段】ブレーキ圧力を所定のしきい値に制限し、且つこのために電子装置(2)により弁特性曲線(10)に従って操作される圧力制限弁(7)による、油圧ブレーキ装置のブレーキ圧力(p)の制御装置は、ブレーキ圧力(p)を評価するための評価アルゴリズムを備えた評価ユニット(4)と、ブレーキ回路内のブレーキ圧力(pmess)を測定するためのセンサ装置(11)と、測定圧力(pmess)および評価圧力(pest)から差圧(Δp)を決定するためのユニット(5)と、弁特性曲線(10)を差圧(Δp)の関数として補正する制御ユニット(3)と、を含む。
(もっと読む)
追突事故を防止する方法および装置
本発明は、車両前部の方向に向けられた環境センサ(2)を用いて、自車両の前方に存在する車両との間隔(d)および/または速度(vrel)を求め、始動状況にある際に、自車両が自車両の前方に存在する車両と衝突する危険が存在するか否かについて、運転者により操作される直線走行設定(alpha FP, alpha BP)を評価し、衝突の危険が存在する場合に、衝突の危険を低減させるために車両の駆動装置(10)および/または減速装置(11)に介入し、および/または、運転者に衝突に危険を知らせるために運転者警告装置(12,5)を駆動する、自車両の前方に存在する車両の後方で始動する際に追突事故を防止する方法および装置に関する。 (もっと読む)
非対称なブレーキのグリップ力状態における自動車の後輪の操舵制御方法
本発明の、少なくとも4つの操舵可能な車輪を有する自動車の後輪の操舵制御方法は、非対称なブレーキのグリップ力状態の存在を検出し、自動車の縦方向の瞬間的な速度(212)の値と、前輪の操舵角(214)の値とに基づいて、第1の中間後輪操舵角設定値(218)を決定し、前の後輪操舵角設定値(215)の関数として、自動車のヨーレート(213)の擾乱(217)を推定し、該擾乱の関数として、第2の中間後輪操舵角設定値(219)を決定し、第1の中間後輪操舵角設定値(218)を、第2の中間後輪操舵角設定値(219)によって修正することによって、現在の後輪操舵角設定値(220)を決定し、現在の後輪操舵角設定値(220)を、後輪の少なくとも1つの操舵アクチュエータ(120)へ伝達するステップを含む。  (もっと読む)
(もっと読む)
電子車両ブレーキシステムを抽気する方法
【課題】この発明の目的は、前記抽気または最初のフィリングプロセスを改良することである。
【解決手段】この発明は、電子的に制御されたブレーキシステムをフィルし、または抽気するための方法に関し、前記ブレーキシステムの電気液圧式部品を作動するための電子コントローラを有し、その液圧式部品がブレーキシステムを具備するために設置され、基本的に前記液圧式部品の内部におそらく残っている気泡がほぼ除去される方法で、液圧式流体でフィルされ、そしてそのフィリングシーケンスが、所定のフィリングプロファイルにしたがって実行される。
この発明は、定義された圧力タイムコース(フィリングプロファイル)を識別するために、ブレーキシステム圧力(ドライバー・パイロット圧力)を検知するための内蔵のセンサ手段が使用され、さらに、もし要求されれば、識別されたフィリングプロファイルに従って、ブレーキシステムの電気液圧式部品が、電子コントローラによって作動することを示唆する。
(もっと読む)
201 - 219 / 219
[ Back to top ]