
Fターム[3D301EA08]の内容
Fターム[3D301EA08]の下位に属するFターム
Fターム[3D301EA08]に分類される特許
1 - 18 / 18
サスペンションシステム
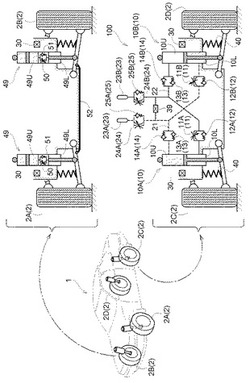
【課題】車両の走行状態に拘らず、最適な乗り心地及び走行安定性を実現することが可能なサスペンションシステムを提供する。
【解決手段】サスペンションシステム100は、上側シリンダ室10Uと、下側シリンダ室10Lと、当該下側シリンダ室10Lの開口部の開口面積を調整する可変バルブ11と、を有し、車両1が有する一対の車輪2に組み込まれた一方の減衰力制御シリンダ10Aの上側シリンダ室10Uと他方の減衰力制御シリンダ10Bの下側シリンダ室10Lとを連通する第1連通路21と、一方の減衰力制御シリンダ10Aの下側シリンダ室10Lと他方の減衰力制御シリンダ10Bの上側シリンダ室10Uとを連通する第2連通路22と、第1連通路21と第2連通路22との夫々に設けられ、減衰力制御シリンダ10A、10Bの動作に応じてオイルを貯留及び排出する一対のオイル受部23と、を備える。
(もっと読む)
車両挙動制御装置および車両挙動制御方法

【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
制振装置、振動抑制方法及び制振プログラム
【課題】加振源の状態が変化した場合でも発生する振動の状態を変化前と変わらない状態に保つことができる制振装置を提供する。
【解決手段】不要な振動を抑制するとともに、必要に応じて所定の振動を発生させる制振装置であって、リニアアクチュエータに支持された補助質量を振動させることにより制振対象物を加振する加振手段と、制振対象物を振動させる加振源の周波数を検出する周波数検出手段と、測定点における振動を検出する振動検出手段と、加振源の周波数と前記測定点において検出された振動に基づいて、抑制するべき振動と、発生させるべき振動の指令値を求める演算手段と、抑制するべき振動の指令値と、発生させるべき振動の指令値を重畳させた制御信号を加振手段に出力する制御信号出力手段とを備えるように構成した。
(もっと読む)
車両用サスペンション装置
【課題】適切に車両の傾斜を抑制することができる車両用サスペンション装置を提供すること。
【解決手段】左車輪および右車輪にそれぞれ設けられたエアばねと、左車輪と右車輪とを接続し、車両に対してロール方向の力を発生するアクティブスタビライザと、を備え、停止時の路面の状態に応じて(S2−Y)エアばねによって変更した(S3,S4)左右の車高差を、発進後の走行路面状態に応じて変更する(S5−Y)ときに、エアばねによる車高調整、およびアクティブスタビライザが発生するロール方向の力によって車両の左右の傾斜を抑制する(S6)。
(もっと読む)
サスペンション装置
【課題】 高価なコントローラ、アクチュエータを用いることなく、車両走行時の低周波から高周波にわたる広い周波数域に対応した減衰力の制御を行う。
【解決手段】 左,右の前輪サスペンション4の緩衝器6と左,右の後輪サスペンション7の緩衝器9とを、周波数感応部24が付設された減衰力調整式油圧緩衝器(即ち、減衰力調整+周波数感応緩衝器)により構成する。緩衝器6,9に設ける減衰力可変機構17のアクチュエータ20をコントローラ37により駆動制御する。コントローラ37は、車体1側の上下振動が低周波のときに、その上下振動に応じて減衰力可変機構17(シャッタ18)による減衰力をソフトとハードとの間で可変に調整し、前記振動が前記低周波よりも高周波のときには、前記減衰力の調整制御を行わない構成としている。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置によるキャンバ角調整動作に関する応答性の低下を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両1の状態に応じて、車両1の後輪のキャンバ角を第1キャンバ状態又は第2キャンバ状態に調整する。車両1の旋回中に、キャンバ角調整装置90によるキャンバ角調整動作が行われている場合に、当該車両1の内輪側、外輪側に係るキャンバ角調整装置90を構成する電気モータの電流値をそれぞれ検出し、当該内輪側に係る電気モータの電流値と、内輪基準値BIを比較することで、内輪側に係るキャンバ角調整装置90の応答性低下を検出し、外輪側に係る電気モータの電流値と、外輪基準値BOを比較することで、外輪側に係るキャンバ角調整装置90の応答性低下を検出し得る。
(もっと読む)
車両用制御装置
【課題】アクチュエータを小型・軽量化できる車両用制御装置を提供すること。
【解決手段】走行速度取得手段S61により車両1の走行速度が取得され、その走行速度取得手段により取得される車両1の走行速度Vが小さいほど、駆動速度調整手段により、キャンバ角調整手段S67により駆動されるアクチュエータの駆動速度が小さくされる。ここで、車両1の走行速度Vが小さくなるにつれアクチュエータの負荷が大きくなる傾向があるが、走行速度Vが小さいほどアクチュエータの駆動速度が小さくされることで、車両1の走行速度Vが小さいときにアクチュエータの負荷が大きくなることを抑制できる。その結果、走行速度Vが小さいときの負荷を考慮してアクチュエータを大型化する必要がなくなるため、アクチュエータを小型・軽量化できる。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
後輪用サスペンション装置
【課題】操縦安定性を確保しつつ車体に伝達する振動を低減可能な後輪用サスペンションを提供する。
【解決手段】車輪支持部材の下部領域と車体側部材とを弾性ブッシュで連結する2本のロアリンクが車両前後方向に並んで配置され、且つ、その2本のロアリンク同士を弾性ブッシュで連結し、ロアリンク同士を連結する弾性ブッシュとして、低周波領域では低く高周波領域では高い剛性を有するブッシュを使用すると共に、車輪支持部材の下部領域及び車体側部材とロアリンクとを連結する弾性ブッシュとして、低周波領域では、上記ロアリンク同士を連結する弾性ブッシュよりも剛性が高いブッシュを使用する。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
原動機付四輪車両
【課題】幅方向に一名しか収容できず、運転者の保護構造に統合されたシャーシと一体化した状態で作られた運転席、及びシャーシと二つの前車輪の同時傾斜により、水平との関係において傾斜した地面上及び/又はカーブ内で車両を平衡化させる手段を有し、四つの車輪を提供する。
【解決手段】四輪型原動機付車両1は、停止時及び低速時に自動的に介入する傾斜ブロック手段を有する。この車両は、停止時に車両が転倒しないような最大値に前記傾斜を制限するための手段を有している。車両は、幅が狭いので狭い場所を走行でき、また、狭い車体幅にもかかわらず、停止時、低速走行、高速度走行、カーブ内走行、段差内走行のいずれにおいても、安定を保つことができる。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】前方車両との車間距離を大きく空けることなく車両から前方の視認対象物を視認可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車高の高さを調整する為の車高調整機構4を備えた車両に搭載され、自車両61が交差点で停車した場合において、現在の自車両61の車高Hと、前方車両62の車高h1と、前方車両62までの車間距離L1と、視認対象物である信号機63の高さh2と、信号機までの距離L2をそれぞれ取得し、取得された各値から自車両61から視認対象物である信号機63を視認する為の車高である設定車高を算出し、算出された設定車高に設定する為の信号を車両制御ECU9に対して出力し、自車両61の車高が設定車高となるように制御させるように構成する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
1 - 18 / 18
[ Back to top ]