
Fターム[3D301EA14]の内容
Fターム[3D301EA14]に分類される特許
1 - 20 / 897
サスペンション制御装置
【課題】サスペンションのストローク速度の推定精度を向上可能とする。
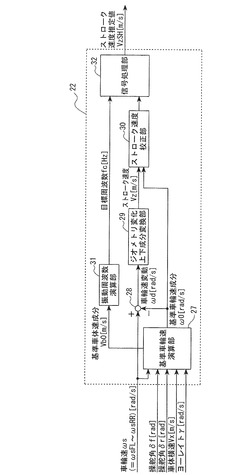
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
サスペンション制御装置

【課題】車両振動の各振動成分の各バネ上挙動を抑制する。
【解決手段】サスペンション制御装置は、減衰させる制御力の出力可能な範囲を算出する制御力可変範囲演算部32と、制御力可変範囲演算部32が算出した出力可能な範囲と車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの少なくとも2つの振動成分から算出された各制御力とをそれぞれ比較し、車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの前記少なくとも2つの振動成分について前記出力可能な範囲内の制御力を抽出する可変範囲比較部33と、可変範囲比較部33が抽出した各制御力に基づいて、各輪の目標制御力を算出する目標制御力演算部34と、目標制御力演算部34が算出した目標制御力に基づいて、ACTR部を制御する制御信号変換部25とを備える。
(もっと読む)
インホイールモータ車両用サスペンションシステム
【課題】 インホイールモータ車両に特有の振動を解消したインホイールモータ車両用サスペンションシステムを提供する。
【解決手段】 インホイールモータ装置1と車体2との間に介在したサスペンション3に、弾性支持機構10およびショックアブソーバ11を有する。弾性支持機構10は弾性係数の変更が可能であり、ショックアブソーバ11は減衰力の変更が可能である。モータ7の回転速度が、定められた共振周波数範囲に入るか否かを監視する共振監視手段21を設ける。共振周波数範囲にモータ7の回転数が入ると判定された場合に、弾性支持機構10に弾性係数を変更させる弾性係数制御手段22、およびショックアブソーバ11の減衰力を変更させる減衰力制御手段23を設ける。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両
【課題】 横風に強い車両を提供することを課題とする。
【解決手段】 第1発明の車両は、横風の発生を予知し、その予知された横風に基づいて、例えば、電子制御ユニットは、支持装置30を、あらかじめ作動させて横風に対処するように制御する。そのため、第1発明の車両は、横風に強い車両となる。また、第2発明の車両は、車体の左側を流れる気流と車体の右側を流れる気流との少なくとも一方を変化させることで、車体の左右を流れる気流の間に圧力差を発生させたり、車体の横風の風下側を流れる気流を車体に当てることで、横風に対抗する力を車体に作用させる。そのため、第2発明の車両は、横風に強い車両となる。
(もっと読む)
サスペンション制御装置
【課題】積分誤差のない速度に基づいて緩衝器の制御を行うことができるようにしたサスペンション制御装置を提供する。
【解決手段】GPSセンサ9は、GPS受信機8からのGPS信号を用いて垂直方向速度情報を演算する。コントローラ10の乗り心地制御部12は、GPSセンサ9からの垂直方向速度情報をばね上速度V1として用いることによって、乗り心地制御に基づく制御指令値を出力する。一方、コントローラ10のうねり抑制制御部14は、他のコントローラ16から出力される車両状態信号に基づいて、ピッチを抑制する制御指令値を出力する。指令値切換部15は、GPS受信機8の受信状態に応じて、乗り心地制御部12による制御指令値とうねり抑制制御部14による制御指令値とのうちいずれか一方を選択して出力する。
(もっと読む)
鞍乗り型の乗り物の制御装置および制御方法
【課題】一例として自動二輪車のような鞍乗り型の乗り物を対象として、その加速時や制動時における車輪のスリップを抑制し、ひいては乗り物の動力性能および制動能力の向上を図る。
【解決手段】乗り物の走行中に例えば前後の車輪の緩衝装置4,18の特性を変更し、乗り物の姿勢を変化させることで、各車輪の路面に対する接地荷重の分布を変更可能な荷重分布変更手段と、乗り物の走行中に、前後の車輪のうちいずれか一方のスリップを抑制するための抑制条件が満たされたことを判定するスリップ抑制条件判定手段91,92と、その条件の満たされたことが判定された場合、条件の満たされていない場合に比べて前記一方の車輪の接地荷重が増大するように、荷重分布変更手段を制御する荷重分布制御手段93と、を備える。
(もっと読む)
サスペンションシステム
【課題】 車体をリーンさせるための機構の実用性を向上させることを課題とする。
【解決手段】 本発明のサスペンションシステム10は、1対の左右輪14をそれぞれ回転可能に保持する1対のステアリングナックル18と、車体に回動可能に支持された1対のロアアーム24と、下端部がそれらロアアームまたはナックルに支持された1対のサスペンション装置18と、車体に設けられ、(a)それらサスペンション装置の上端部を、左右の端部に設けられた1対の端部で支持する支持部材34と、(b) 車体を路面に対して左右に傾斜させるべく、1対のサスペンション装置の上端部が、一方の下方への変位量が他方の上方への変位量よりも大きくなる相対変位をするように、スプリング支持体を動作させるアクチュエータ36とを有する支持装置30とを備えることで、スプリング支持体を回転させるだけで車体をリーンさせることができる。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsが含んでいる成分のうち、サスペンションのストロ−クに伴う車輪14の車両前後方向への変位に起因する成分である車輪前後変位成分ωzyに基づいて、サスペンションのストロ−ク速度Vzを推定する。そして、推定したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。この構成によれば、例えば、サスペンションがストロ−クすると、車輪14に車両前後方向への変位が発生するところ、サスペンションのストロ−クに伴う車輪前後変位成分ωzyに基づくことで、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
キャンバ制御装置
【課題】燃費を十分に良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバを付与するためのキャンバ可変機構と、車両に振動が発生しているかどうかを判断する振動発生判断処理手段と、車両に振動が発生していると判断された場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両に振動が発生していると判断された場合に、所定の車輪の各タイヤに、互いに対向する方向にキャンバスラストが発生させられるので、車両を十分に安定させて走行させることができる。燃費を十分に良くすることができる。
(もっと読む)
車両運動制御システム
【課題】車輪特殊配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】左右輪14の各々に対応して設けられた距離変更装置を制御してそれらの各々の動作量に差を設けることで車体を傾斜させる場合に、(i)実現させるべき車体の傾斜の程度に基づいて目標動作量差ΔLを決定し、(ii)増加させる方の距離変更装置の動作量ΔLUPと減少させる方の距離変更装置の動作量ΔLDWとへの目標動作量差ΔLの配分を決定し、(iii)その配分に基づいて2つの距離変更装置の各々の目標動作量を決定する。そのことにより、車体を傾斜させる際の車体の重心位置,左右輪と前後輪との荷重配分等を変更することが可能である。
(もっと読む)
キャンバ制御装置
【課題】スプリット路上で車両を走行させたり、発進させたりする際に、車輪に付与されたキャンバによって車両の状態が不安定になることがないようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がスプリット路上にあるかどうかを判断するスプリット路判断処理手段と、スプリット路判断処理手段によって車両がスプリット路上にあると判断された場合に、キャンバ可変動作を変更するキャンバ可変動作変更処理手段とを有する。車両がスプリット路上にあると判断された場合に、車輪がキャンバが付与されている状態に保持されるか、キャンバが付与されていない状態に保持されるか、又はキャンバの付与動作若しくは解除動作が遅延させられるので、車両の状態が不安定になることがない。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するときの消費電力を抑制できる車両用制御装置を提供すること。
【解決手段】車輪のキャンバ角を調整するアクチュエータを備えた車両に用いられるものであり、指標取得手段S63によりアクチュエータに供給される電力に関する指標が取得され、その指標が所定値より大きいか指標判断手段S64により判断される。判断の結果、指標が所定値より大きい場合に、電力調整手段S65によりアクチュエータに供給される電力が小さくなるように調整され、キャンバ角調整手段S66により車輪2のキャンバ角が調整される。これにより、路面の状態や車両の走行速度等により車輪2のキャンバ角を調整するときのアクチュエータの負荷が変動しても、アクチュエータの消費電力を抑制できる。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
車両用制御装置
【課題】搭乗者に違和感を与え難くすることができる車両用制御装置を提供すること。
【解決手段】条件判断手段S32により所定の調整条件を満たすと判断される場合に、キャンバ角調整手段S33,S36によりキャンバ角調整装置を作動させて車輪のキャンバ角が調整される。この調整条件を満たす場合であっても、車輪のキャンバ角の調整を禁止する所定の条件を満たす場合は、調整禁止手段S31によりキャンバ角調整手段S33,S36によるキャンバ角の調整が禁止され、キャンバ角の変化に伴う振動等を生じなくできる。これにより、車輪のキャンバ角の調整を禁止する所定の条件を満たす場合に、キャンバ角調整手段S33,S36によるキャンバ角の調整を調整禁止手段S31により禁止することで、キャンバ角の変化に伴う振動等を生じないようにして、搭乗者に違和感を与え難くすることができる。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置によるキャンバ角調整動作に関する応答性の低下を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両1の状態に応じて、車両1の後輪のキャンバ角を第1キャンバ状態又は第2キャンバ状態に調整する。車両1の旋回中に、キャンバ角調整装置90によるキャンバ角調整動作が行われている場合に、当該車両1の内輪側、外輪側に係るキャンバ角調整装置90を構成する電気モータの電流値をそれぞれ検出し、当該内輪側に係る電気モータの電流値と、内輪基準値BIを比較することで、内輪側に係るキャンバ角調整装置90の応答性低下を検出し、外輪側に係る電気モータの電流値と、外輪基準値BOを比較することで、外輪側に係るキャンバ角調整装置90の応答性低下を検出し得る。
(もっと読む)
緩衝器の制御装置
【課題】スカイフック制御を利用して緩衝器が発生する減衰力を制御する制御装置において、簡便な方法でばね下振動を抑制すること。
【解決手段】車両におけるばね上部材31とばね下部材32との間に介装される緩衝器1が発生する減衰力を制御する緩衝器1の制御装置100において、車速とストローク速度とに基づいて緩衝器1が発生する減衰力を制御する第2制御部44と、ストローク速度に基づいてばね下部材32の振動状態を判定する判定部41と、緩衝器1が発生する減衰力がスカイフック制御されている状態で、判定部41にてばね下部材32の振動が予め定められた振動状態に達したと判定された場合には、緩衝器1が発生する減衰力を第2制御部44にて制御するように切り換える制御切換部42とを備える。
(もっと読む)
車両
【課題】 旋回性能を向上し、安定して旋回すると共に、簡単な機構で快適な乗り心地の車両を提供する。
【解決手段】 車体2と、車体に回転可能に取り付けられた車輪5と、車体2に連結される支持部材22,23,24,25と、支持部材23,24,25に対して回転可能に連結されると共に、車体2を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動するアクチュエータ31と、左右の車輪5の接地点の高さ、車体2の傾斜方向に発生する第1の横加速度、、及び左右の車輪5の車輪速に応じてアクチュエータ31の回転速度を制御する制御部100と、を有する。
(もっと読む)
1 - 20 / 897
[ Back to top ]