
Fターム[3D301EA48]の内容
Fターム[3D301EA48]の下位に属するFターム
制動操作変化量(ブレーキ閉速度/閉加速度) (48)
ブレーキ圧 (116)
パーキング/駐車ブレーキ (36)
Fターム[3D301EA48]に分類される特許
1 - 20 / 318
インホイールモータ車両用サスペンションシステム
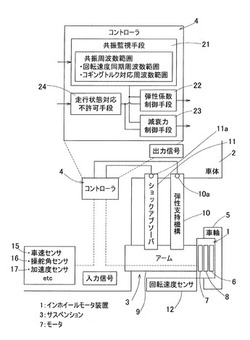
【課題】 インホイールモータ車両に特有の振動を解消したインホイールモータ車両用サスペンションシステムを提供する。
【解決手段】 インホイールモータ装置1と車体2との間に介在したサスペンション3に、弾性支持機構10およびショックアブソーバ11を有する。弾性支持機構10は弾性係数の変更が可能であり、ショックアブソーバ11は減衰力の変更が可能である。モータ7の回転速度が、定められた共振周波数範囲に入るか否かを監視する共振監視手段21を設ける。共振周波数範囲にモータ7の回転数が入ると判定された場合に、弾性支持機構10に弾性係数を変更させる弾性係数制御手段22、およびショックアブソーバ11の減衰力を変更させる減衰力制御手段23を設ける。
(もっと読む)
車両のロール角推定方法及び装置

【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両状態量推定装置及びサスペンション荷重推定装置
【課題】車両状態量及びサスペンション荷重の推定精度が確保される車両状態量推定装置及びサスペンション荷重推定装置を提供する。
【解決手段】サスペンション荷重に伴うボディパネル1の歪量を、直接、ボディパネル1に取り付けられた半導体歪センサ3によって検出するので、車両走行時の荷重移動を高い精度で推定することができる。
(もっと読む)
キャンバ角調整装置
【課題】軸と軸受との間のガタの発生を抑制しつつ、軸と軸受との間の摺動抵抗を低減できるキャンバ角調整装置を提供する。
【解決手段】アッパーアームの一端側が回転可能に連結されるクランクピン93bが、クランクジャーナル93aに対して偏心する。よって、クランクジャーナル93aが回転されると、アッパーアームの一端側がクランクピン93bの回転軌跡に沿って移動され、車輪のキャンバ角が調整される。クランクジャーナル93a及びクランクピン93bとジャーナル軸受96及びピン軸受97とがそれぞれ楕円形状に形成されるので、クランクジャーナル93a及びクランクピン93bの長径方向が、ジャーナル軸受96及びピン軸受97の短径方向を向いた状態では、両者の間にガタが発生することを抑制できる。一方、その状態から相対回転させる場合には、両者の間に隙間を形成して、摺動抵抗を低減できる。
(もっと読む)
減衰力調整式緩衝器
【課題】減衰力調整式緩衝器において、ピストンロッドに作用する横力を考慮して正確な減衰力制御を行なうことができるようにする。
【解決手段】コントローラCにより、各種センサの検出信号に基づき、車両の走行状態に応じて減衰力調整式緩衝器1の減衰力調整機構6のソレノイド7に制御電流を供給して、減衰力をリアルタイム制御することにより、車両の操縦安定性及び乗心地を向上させる。減衰力調整式緩衝器1のピストンロッド5に歪センサ19を装着する。コントローラCにより、歪センサ19の検出信号に基づき、ピストンロッド5に作用する横力を演算し、この横力によって生じるピストロッドとロッドガイドとの間の摩擦力に基づき、ソレノイド7への制御電流を補正することにより、正確な減衰力制御を行なう。
(もっと読む)
車両用制御装置
【課題】車両の安定性を確保しつつ操舵感を向上できる車両用制御装置を提供すること。
【解決手段】車両1の状態量が所定の第1条件を満たす場合に、後輪2RL,2RRのキャンバ角が調整されて後輪2FL,2FRにネガティブキャンバが付与される。また、車両1の状態量が第1条件と異なる第2条件を満たす場合には、後輪2FL,2FRにネガティブキャンバが付与され、車両1のステア特性がアンダーステア傾向にされる。さらに、第2条件を満たす場合には、第1条件を満たす場合より前輪2FL,2FRの等価コーナリングフォースが大きくされ、操安キャパシティが向上される。操安キャパシティが高いほど車両1の収束性が高いといえるので、第2条件を満たす場合には、車両1の安定性を確保しつつ操舵感を向上できる。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
鞍乗り型の乗り物の制御装置および制御方法
【課題】一例として自動二輪車のような鞍乗り型の乗り物を対象として、その加速時や制動時における車輪のスリップを抑制し、ひいては乗り物の動力性能および制動能力の向上を図る。
【解決手段】乗り物の走行中に例えば前後の車輪の緩衝装置4,18の特性を変更し、乗り物の姿勢を変化させることで、各車輪の路面に対する接地荷重の分布を変更可能な荷重分布変更手段と、乗り物の走行中に、前後の車輪のうちいずれか一方のスリップを抑制するための抑制条件が満たされたことを判定するスリップ抑制条件判定手段91,92と、その条件の満たされたことが判定された場合、条件の満たされていない場合に比べて前記一方の車輪の接地荷重が増大するように、荷重分布変更手段を制御する荷重分布制御手段93と、を備える。
(もっと読む)
キャンバ制御装置
【課題】燃費を十分に良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバを付与するためのキャンバ可変機構と、車両に振動が発生しているかどうかを判断する振動発生判断処理手段と、車両に振動が発生していると判断された場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両に振動が発生していると判断された場合に、所定の車輪の各タイヤに、互いに対向する方向にキャンバスラストが発生させられるので、車両を十分に安定させて走行させることができる。燃費を十分に良くすることができる。
(もっと読む)
車両
【課題】前輪と後輪に付与する駆動力を調整することで車高を変更することができるようにした車両を提供する。
【解決手段】車体12と、車体12の進行方向前側に設けられる前輪14と、車体12の進行方向後側に設けられる後輪16と、前輪14に駆動力を付与する前輪電動モータ18と、後輪16に駆動力を付与する後輪電動モータ20と、前輪14と車体12とを接続する前輪サスペンション22と、後輪16と車体12とを接続する後輪サスペンション24と、前輪サスペンション22および後輪サスペンション24を通じて車体12に重力方向における所定の荷重が生じるように、前輪電動モータ18が前輪14に付与する駆動力の大きさおよび後輪電動モータ20が後輪16に付与する駆動力の大きさを調整する調整手段26とを有するように構成する。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
サスペンション装置
【課題】 高価なコントローラ、アクチュエータを用いることなく、車両走行時の低周波から高周波にわたる広い周波数域に対応した減衰力の制御を行う。
【解決手段】 左,右の前輪サスペンション4の緩衝器6と左,右の後輪サスペンション7の緩衝器9とを、周波数感応部24が付設された減衰力調整式油圧緩衝器(即ち、減衰力調整+周波数感応緩衝器)により構成する。緩衝器6,9に設ける減衰力可変機構17のアクチュエータ20をコントローラ37により駆動制御する。コントローラ37は、車体1側の上下振動が低周波のときに、その上下振動に応じて減衰力可変機構17(シャッタ18)による減衰力をソフトとハードとの間で可変に調整し、前記振動が前記低周波よりも高周波のときには、前記減衰力の調整制御を行わない構成としている。
(もっと読む)
車両用制御装置
【課題】キャンバ角調整装置の故障により、一部の車輪のキャンバ角が制御不能となった場合でも、車両の旋回時の走行安定性を確保することができる車両用制御装置を提供する。
【解決手段】故障により旋回内輪(左の後輪2RL)が調整不能となった場合には、旋回外輪(右の後輪2RR)に、旋回内輪よりも絶対値が大きなネガティブのキャンバ角を付与する。一方、故障により旋回外輪(右の後輪2RR)が調整不能となった場合には、旋回内輪(左の後輪2RL)へのネガティブキャンバの付与を解除する。これにより、車両のステア特性を、オーバーステア傾向を減少させる、或いは、アンダーステア傾向を増加させる方向へ変化させ、車両の旋回時の走行安定性を確保することができる。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】輪荷重の変動を抑制しつつ、操舵応答性の向上およびロール挙動の抑制を可能とする。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、当該変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し、合計値を基にドライバ要求トルクを補正する。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
車両用制御装置
【課題】搭乗者に違和感を与え難くすることができる車両用制御装置を提供すること。
【解決手段】条件判断手段S32により所定の調整条件を満たすと判断される場合に、キャンバ角調整手段S33,S36によりキャンバ角調整装置を作動させて車輪のキャンバ角が調整される。この調整条件を満たす場合であっても、車輪のキャンバ角の調整を禁止する所定の条件を満たす場合は、調整禁止手段S31によりキャンバ角調整手段S33,S36によるキャンバ角の調整が禁止され、キャンバ角の変化に伴う振動等を生じなくできる。これにより、車輪のキャンバ角の調整を禁止する所定の条件を満たす場合に、キャンバ角調整手段S33,S36によるキャンバ角の調整を調整禁止手段S31により禁止することで、キャンバ角の変化に伴う振動等を生じないようにして、搭乗者に違和感を与え難くすることができる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置によるキャンバ角調整動作に関する応答性の低下を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両1の状態に応じて、車両1の後輪のキャンバ角を第1キャンバ状態又は第2キャンバ状態に調整する。車両1の旋回中に、キャンバ角調整装置90によるキャンバ角調整動作が行われている場合に、当該車両1の内輪側、外輪側に係るキャンバ角調整装置90を構成する電気モータの電流値をそれぞれ検出し、当該内輪側に係る電気モータの電流値と、内輪基準値BIを比較することで、内輪側に係るキャンバ角調整装置90の応答性低下を検出し、外輪側に係る電気モータの電流値と、外輪基準値BOを比較することで、外輪側に係るキャンバ角調整装置90の応答性低下を検出し得る。
(もっと読む)
車両用制御装置
【課題】撮像手段による撮像内容を用いて、自車の走行車線を維持するように車両を制御する車両用制御装置に関し、車輪のキャンバ角を調整することで、走行車線を維持可能な車両用制御装置を提供する。
【解決手段】車両用制御装置100は、フロントカメラ85により前方の走行車線DLを撮像し、画像処理部86により画像解析することにより、走行車線DLにおける左車線境界LL、右車線境界LR、自車位置を特定する。特定結果に基づき、自車が当該走行車線を逸脱しそうであると判断すると、当該車両用制御装置100は、右後輪2RR、左後輪2RLに夫々配設されたキャンバ角調整装置90を制御して、何れか一方の車輪に係るキャンバ角を、他方の車輪と異なるキャンバ角に変更し、キャンバースラストにより走行車線DL中央へと導く。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、乗員が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、加速操作部材の操作量に基づいて走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。走行制御処理手段は、共振の状態を判定する共振発生状態判定処理手段及び共振の状態に応じて、走行用の駆動部における駆動力の発生を抑制する駆動力抑制処理手段を備える。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
1 - 20 / 318
[ Back to top ]