
Fターム[3D301EA76]の内容
車体懸架装置 (72,824) | 入力信号 (10,935) | 他(サス以外)の機器の状態 (847) | 操舵/ステアリング系 (157)
Fターム[3D301EA76]に分類される特許
1 - 20 / 157
車両用サスペンション装置、そのジオメトリ調整方法および自動車
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
車両

【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
キャンバ制御装置
【課題】スプリット路上で車両を走行させたり、発進させたりする際に、車輪に付与されたキャンバによって車両の状態が不安定になることがないようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がスプリット路上にあるかどうかを判断するスプリット路判断処理手段と、スプリット路判断処理手段によって車両がスプリット路上にあると判断された場合に、キャンバ可変動作を変更するキャンバ可変動作変更処理手段とを有する。車両がスプリット路上にあると判断された場合に、車輪がキャンバが付与されている状態に保持されるか、キャンバが付与されていない状態に保持されるか、又はキャンバの付与動作若しくは解除動作が遅延させられるので、車両の状態が不安定になることがない。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するときの消費電力を抑制できる車両用制御装置を提供すること。
【解決手段】車輪のキャンバ角を調整するアクチュエータを備えた車両に用いられるものであり、指標取得手段S63によりアクチュエータに供給される電力に関する指標が取得され、その指標が所定値より大きいか指標判断手段S64により判断される。判断の結果、指標が所定値より大きい場合に、電力調整手段S65によりアクチュエータに供給される電力が小さくなるように調整され、キャンバ角調整手段S66により車輪2のキャンバ角が調整される。これにより、路面の状態や車両の走行速度等により車輪2のキャンバ角を調整するときのアクチュエータの負荷が変動しても、アクチュエータの消費電力を抑制できる。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置によるキャンバ角調整動作に関する応答性の低下を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両1の状態に応じて、車両1の後輪のキャンバ角を第1キャンバ状態又は第2キャンバ状態に調整する。車両1の旋回中に、キャンバ角調整装置90によるキャンバ角調整動作が行われている場合に、当該車両1の内輪側、外輪側に係るキャンバ角調整装置90を構成する電気モータの電流値をそれぞれ検出し、当該内輪側に係る電気モータの電流値と、内輪基準値BIを比較することで、内輪側に係るキャンバ角調整装置90の応答性低下を検出し、外輪側に係る電気モータの電流値と、外輪基準値BOを比較することで、外輪側に係るキャンバ角調整装置90の応答性低下を検出し得る。
(もっと読む)
車両用制御装置
【課題】撮像手段による撮像内容を用いて、自車の走行車線を維持するように車両を制御する車両用制御装置に関し、車輪のキャンバ角を調整することで、走行車線を維持可能な車両用制御装置を提供する。
【解決手段】車両用制御装置100は、フロントカメラ85により前方の走行車線DLを撮像し、画像処理部86により画像解析することにより、走行車線DLにおける左車線境界LL、右車線境界LR、自車位置を特定する。特定結果に基づき、自車が当該走行車線を逸脱しそうであると判断すると、当該車両用制御装置100は、右後輪2RR、左後輪2RLに夫々配設されたキャンバ角調整装置90を制御して、何れか一方の車輪に係るキャンバ角を、他方の車輪と異なるキャンバ角に変更し、キャンバースラストにより走行車線DL中央へと導く。
(もっと読む)
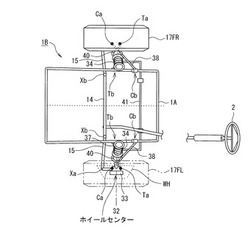
車両用サスペンション装置およびそのジオメトリ調整方法
【課題】車両用サスペンション装置の操縦性・安定性を向上させること。
【解決手段】タイヤを取り付けるタイヤホイールと、前記タイヤホイールを支持するホイールハブ機構と、車軸よりも車両上下方向の下側において前記ホイールハブ機構と車体とを連結する第1のリンク部材と、車軸よりも車両上下方向の下側において前記ホイールハブ機構と車体とを連結し、前記第1のリンク部材と車両上面視において交差する第2のリンク部材と、車両幅方向に移動し、前記ホイールハブ機構を転舵させるステアリングラックと、を有する車両用サスペンション装置とした。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の調整に伴って生じる車両の挙動特性の変化に基づく違和感を、運転者等に与えることのない車両用制御装置を提供する。
【解決手段】車両用制御装置100は、安定キャンバ付与基準データ72B等に規定された条件を満たす場合、キャンバ角調整装置44を制御し、左後輪2RL及び右後輪2RRのキャンバ角を調整する。又、車両用制御装置100は、旋回判定基準データ72Cの基準値と、加速度センサ装置80等の検出値を比較することで、車両1が旋回中であるか否かを判定する。車両1が旋回中である場合、車両用制御装置100は、安定キャンバ付与基準データ72Bに係る条件を満たしていても、キャンバ角調整装置44によるキャンバ角の調整を禁止する。
(もっと読む)
車両操舵装置及びインホイールモータ車両
【課題】操舵軸に改良を加えることにより、ダンパーを追加しても必要以上に大型化することが避けられ、しかも十分大きい回転トルクを伝達できる車両操舵装置を提供することである。
【解決手段】インホイールモータ形式の車輪と、車台に設置された操舵用の駆動装置と、前記駆動装置の出力軸とインホイールモータユニットとの間に介在された操舵軸とからなる操舵装置において、前記操舵軸が、駆動装置側と一体化された内軸25と、モータユニット側と一体化された外軸26により構成され、外軸26に内軸25が軸方向に相対移動可能に嵌合された継手部28が設けられ、前記継手部28の内部に緩衝装置41及びトルク伝達部40が設けられた構成とした。
(もっと読む)
車両制御装置および方法
【課題】車両の左右非対称性に起因する直進制動時の偏向を抑制する。
【解決手段】車両には、ストローク量を調整可能に構成されたサスペンションが車輪毎に設置されている。直進制動判定部121は、操舵角センサの検出値に基づき車両が直進中か否かを判定し、さらにブレーキトルクセンサの検出値に基づき車両が制動されたか否かを判定する。偏向予測部122は、直進制動判定部121により直進時に車両が制動されたと判定されたとき、車両の左右非対称性に起因して車体に発生する偏向量を予測する。ストローク調整部126は、予測された偏向を減少させるようにサスペンションのストローク量を変更する。
(もっと読む)
自動車のリアアクスル
【課題】自動車の新規のリアアクスルを提供する。
【解決手段】自動車のリアアクスル、特に、操向可能なリアアクスルに関し、このリアアクスルは、いずれの場合も1つのリアホイールを保持するホイール担体10を有し、いずれの場合も、1つの上側横リンク11、1つの下側横リンク12、および1つのトラックロッド13が各リアホイールと相互作用し、トラックロッド13が、自動車の長手方向で見て、リアホイールまたはホイール担体10の中心の後ろに配置され、自動車の長手方向で見て、いずれの場合も、リアホイールまたはホイール担体10の中心の後ろに配置された両方のトラックロッド13が、同様に、自動車の長手方向で見て、いずれの場合も、リアホイールまたはホイール担体10の中心の後ろに配置された共有ステアリングアクチュエータ15によって係合される。
(もっと読む)
車両用制御装置
【課題】車両の旋回段階に応じて旋回特性を変化させることができる車両用制御装置を提供すること。
【解決手段】操舵角の時間微分値に基づく第2条件判断手段により第2条件を満たすと判断され、かつ、操舵角に基づく第1条件判断手段により第1条件を満たすと判断される場合に、キャンバ角調整装置を作動させて車輪の内の少なくとも旋回外輪のキャンバ角を第1キャンバ角に調整する。ここで、操舵角は車両が旋回状態にあるかを検出することができ、操舵角の時間微分値は操舵角速度であるから、いずれも運転者の旋回に係る操作を直接的に反映したものであり、運転者の操作に基づく車両の旋回段階を反映している。このように、第1条件と第2条件の二つの条件に基づいて車輪のキャンバ角が調整されることにより、車両の旋回特性を旋回段階に応じて変えることができる。
(もっと読む)
キャンバ制御装置
【課題】制動安定性を高くすることができ、車両を急激に制動しても、十分な制動力を発生させることができるようにする。
【解決手段】車両のボディと、複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、急制動判定指標に基づいて、車両が急激に制動されたかどうかを判断する急制動判断処理手段と、車両が急激に制動されたと判断された場合に、前記所定の車輪へのキャンバの付与を阻止するキャンバ付与阻止処理手段とを有する。車両が急激に制動されると、所定の車輪へのキャンバの付与が阻止されるので、タイヤにおける接地面積が小さくなるのを抑制することができる。タイヤのグリップ力が小さくなることがないので、車両を急激に制動しても、十分な制動力を発生させることができる。
(もっと読む)
車両用キャンバ角制御装置
【課題】 車両の走行状態に応じて前輪と後輪の駆動力が分配制御される四輪駆動車両に用いられ、タイヤの偏摩耗を抑制して、タイヤの寿命を向上させると共に車両の走行安定性を確保することができる車両用キャンバ角制御装置を提供する。
【解決手段】 車両1の走行状態に応じて前輪2FL,2FRと後輪2RL,2RRの駆動力が分配制御される四輪駆動車両に用いられる車両用キャンバ角制御装置100において、車両1の状態量を取得する状態量取得部61b,61cと、後輪2RL,2RRの制駆動力の有無を取得する後輪制駆動力取得部と、車両1の走行状態を取得する走行状態取得部63a,80と、後輪2RL,2RRのキャンバ角を調整するキャンバ角調整機構44〜50と、状態量取得部61a,61b,61c、後輪制駆動力取得部及び走行状態取得部63a,80に基づいて、キャンバ角調整機構44〜50を制御する制御部100と、を有することを特徴とする。
(もっと読む)
オートバイに対して働く左右方向の力の削減のための方法及び装置
【課題】オートバイのカーブ走行の際に、後輪の横滑り、オートバイは棒立ち(ハイサイダー)を防ぐ制御装置及び方法を提供する。
【解決手段】カーブ走行の間にオートバイの後輪が左右方向にスリップする不安定な状態を後輪のスリップ角、操舵角、車体の傾斜状態、加速度、後輪のホイールスリップ等の変化度により検知して、ハイサイダーの危険が検知されると、ドライバーがその様な状況でエンジントルクを絞っても、エンジントルクの低下が自動的に制限される。
(もっと読む)
1 - 20 / 157
[ Back to top ]