
Fターム[3D301EA83]の内容
車体懸架装置 (72,824) | 入力信号 (10,935) | 外部状況 (556) | 路面状況、障害物、他車 (268) | 路面摩擦係数/ミュー (85)
Fターム[3D301EA83]に分類される特許
1 - 20 / 85
キャンバ制御装置
【課題】スプリット路上で車両を走行させたり、発進させたりする際に、車輪に付与されたキャンバによって車両の状態が不安定になることがないようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がスプリット路上にあるかどうかを判断するスプリット路判断処理手段と、スプリット路判断処理手段によって車両がスプリット路上にあると判断された場合に、キャンバ可変動作を変更するキャンバ可変動作変更処理手段とを有する。車両がスプリット路上にあると判断された場合に、車輪がキャンバが付与されている状態に保持されるか、キャンバが付与されていない状態に保持されるか、又はキャンバの付与動作若しくは解除動作が遅延させられるので、車両の状態が不安定になることがない。
(もっと読む)
車両用制御装置

【課題】車輪のキャンバ角をアクチュエータの駆動力により調整可能な車両に対し、消費エネルギーを抑制しつつ、車輪のキャンバ角が所定角度から変化することを抑制できる車両用制御装置を提供する。
【解決手段】路面に所定値以上の凹凸が存在する場合には(S105:Yes)、その凹凸を通過する際に車両に大きなサスペンションストロークが生じ、その状態で外力が作用すると、車輪のキャンバ角が所定角度から変化する可能性がある。よって、この場合には(S105:Yes)、第2補正手段を実行することで(S121)、車両が凹凸を通過する前にキャンバ調整機構をサーボロック状態に設定しておく。その結果、外力の作用により車輪のキャンバ角が変化することをより確実に抑制することができる。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
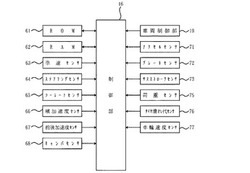
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
車両用制御装置
【課題】タイヤの偏摩耗を抑制して、タイヤの寿命を向上させると共に車両の走行安定性を確保することができる車両用制御装置を提供すること。
【解決手段】車輪にスリップが発生すると判断される場合に、車輪のキャンバ角が第2キャンバ角(第1キャンバ角よりも絶対値が小さいキャンバ角)に調整され、車輪へのネガティブキャンバの付与が解除されるので、タイヤの偏摩耗を抑制できる。即ち、車輪にスリップが発生するとタイヤの摩耗が進行し易いので、車輪のスリップが発生する場合に、車輪へのネガティブキャンバの付与を解除することで、接地面積を広げてタイヤの偏摩耗を抑制できる。その結果、タイヤの寿命を向上させることができる。また、タイヤの偏摩耗を抑制することで、タイヤの接地面が不均一となるのを防止して、車両の走行安定性を確保できる。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
キャンバ制御装置
【課題】車両が低μ路を走行しているときの走行安定性及び旋回安定性を十分に高くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、車輪にキャンバを付与するためのキャンバ可変機構と、車両が低μ路を走行しているかどうかを判断する走行環境判定処理手段と、キャンバ付与条件を設定するキャンバ付与条件設定処理手段と、キャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立したと判断される場合に、車輪にキャンバを付与するキャンバ付与処理手段とを有する。キャンバ付与条件設定処理手段は、車両が低μ路を走行していると判断される場合に、早く所定の車輪にキャンバが付与されるようにキャンバ付与条件を変更する。車両の走行安定性及び旋回安定性を十分に高くすることができる。
(もっと読む)
キャンバ制御装置
【課題】制動安定性を高くすることができ、車両を急激に制動しても、十分な制動力を発生させることができるようにする。
【解決手段】車両のボディと、複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、急制動判定指標に基づいて、車両が急激に制動されたかどうかを判断する急制動判断処理手段と、車両が急激に制動されたと判断された場合に、前記所定の車輪へのキャンバの付与を阻止するキャンバ付与阻止処理手段とを有する。車両が急激に制動されると、所定の車輪へのキャンバの付与が阻止されるので、タイヤにおける接地面積が小さくなるのを抑制することができる。タイヤのグリップ力が小さくなることがないので、車両を急激に制動しても、十分な制動力を発生させることができる。
(もっと読む)
車両制御装置
【課題】 車両挙動変化に対するショックアブソーバの減衰力特性の制御の遅れを抑制することができる車両制御装置を提供すること。
【解決手段】 ホイルシリンダ液圧が高くなるほど減衰力特性をハードに設定するようにした。
(もっと読む)
キャンバー角調整システム及びキャンバー角調整方法
【課題】 車両が、旋回初期に旋回しやすく、旋回終期に直進状態に戻りやすくすることができるキャンバー角調整システム及びキャンバー角調整方法を提供する。
【解決手段】 車輪2と、車輪2のキャンバー角を調整するキャンバー角調整機構4と、を備えたキャンバー角調整システムにおいて、車両1の旋回を検出する旋回検出手段32,34,35,54aと、旋回検出手段32,34,35,54aの検出した結果から車両1の旋回状態を判断し、旋回初期と判断した場合、後内輪より先に後外輪のキャンバー角調整機構4をネガティブキャンバーに制御する旋回時キャンバー角調整手段71と、を有することを特徴とする。
(もっと読む)
車両用制御装置
【課題】走行性能の確保と省燃費化との両立を効率良く図ることができる車両用制御装置を提供すること。
【解決手段】省燃費運転支援装置84が作動している状態では、省燃費運転支援装置84が作動していない状態に対して第2トレッド22の低転がり抵抗を早期に発揮させることができ、省燃費化を優先して図ることができる。一方、省燃費運転支援装置84が作動していない状態では、省燃費運転支援装置84が作動している状態に対して第2トレッド22の低転がり抵抗を発揮させるタイミングを遅延させて、グリップ力の確保を優先して図ることができる。このように、省燃費運転支援装置84が作動しているかに応じてキャンバ角を制御するタイミングを変更することで、単にグリップ力の確保と省燃費化との両立を図るのみでなく、グリップ力の確保と省燃費化との両立を効率良く図ることができる。
(もっと読む)
車両用制御装置及び車両
【課題】車両の旋回状態を考慮して左右輪のキャンバを使い分けることにより優れた旋回性能を発揮させ得る車両用制御装置及び車両を提供すること。
【解決手段】本発明によれば、車輪が制動されながら旋回する場合に、検出手段により検出された旋回状態に応じて、第2の調整手段により、第1の調整手段によりキャンバ角が調整されている車輪のうち、左輪又は右輪のキャンバ角が、検出手段により検出された旋回状態に応じて調整される。左輪又は右輪のキャンバ角が変更されると、左輪と路面とによる摩擦抵抗と右輪と路面とによる摩擦抵抗とのバランスが相対的に変化するので、かかる摩擦抵抗のバランスの変化方向に応じて、車両重心を中心として車両を回転させるモーメントを発生できる。よって、そのようなモーメントを旋回状態に応じて発生させることにより、旋回状態を改善でき、優れた旋回安定性を提供できる。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 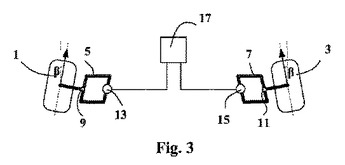 (もっと読む)
(もっと読む)
低燃費車両
【課題】燃費を良くすることができ、制動性及び旋回性を高くすることができるようにする。
【解決手段】ボディ11と、ボディ11に対して回転自在に配設された前輪及び後輪と、後輪とボディ11との間に配設され、後輪にキャンバ角を付与する車輪駆動部31、32とを有する。前記後輪の各タイヤと路面との摩擦係数は、前輪の各タイヤと路面との摩擦係数より小さくされる。前記後輪の各タイヤと路面との摩擦係数は、前輪の各タイヤと路面との摩擦係数より小さくされるので、車両の燃費を良くすることができる。また、前輪の各タイヤと路面との摩擦係数が大きくされるので、加速性及び制動性を十分に高くすることができる。そして、後輪にキャンバ角が付与されるので、横力を発生させ、コーナリングフォースを発生させることができ、旋回性を高くすることができる。
(もっと読む)
車両挙動制御装置
【課題】路面状況に応じて車両のヨー運動とサスペンションの減衰力の制御を行うことで、車両挙動特性と乗心地性を向上する車両挙動制御装置を提供する。
【解決手段】本発明にかかる車両挙動制御装置は、車両の車体と前輪および後輪との間に介装され、減衰力可変機構を備えたサスペンション装置と、前輪または該後輪の少なくとも一方における該左右輪の駆動力を調整する第1のヨー運動調整手段と、輪間での差動制限度合を調整する第2のヨー運動調整手段と、路面の状況に応じて第1及び第2のヨー運動調整手段を制御して車両のヨー運動を制御するとともに、減衰力可変機構を制御して減衰力可変機構の減衰力を調整する制御手段とを有する。
(もっと読む)
車両挙動制御装置
【課題】走行状態に応じて変動する各輪の状態を考慮してサスダンパによる可変減衰力制御と前後駆動力配分制御との協調を図り、車両の操縦安定性を向上させる。
【解決手段】制御ユニット30は、操舵操作に応じてサスダンパ制御装置24の制御信号Drs_d_sに一次遅れ処理を加えて補正し(Drs_d_mを算出し)、ロール剛性の前後軸配分Drsを演算して、旋回内輪の許容駆動力Fxfi_c、Fxri_cを算出し、旋回内輪の許容駆動力Fxfi_c、Fxri_cにより前後駆動力配分の目標値Dx_tを設定して前後駆動力配分制御装置18に出力する。また、旋回内側後輪の許容駆動力Fxri_cが少なくとも各輪の総駆動力Fxに基づいて設定した閾値より小さい場合は、サスダンパ制御装置24に対してサスダンパ制御補正値Drs_d_mを出力して後軸のロール剛性配分を低下させる。
(もっと読む)
車両用運動制御装置
【課題】車両の安定性を確保しながら的確に障害物を回避する。
【解決手段】各タイヤの実際のタイヤ力を検出するタイヤ力検出手段(20)と、障害物との衝突を回避するために各タイヤの目標制動力を設定する制動制御目標制動力設定手段(S105)と、目標制動力の下で各タイヤの制動力を制御する制動制御手段(S110)と、各タイヤの制動力を制御した後に、該制動力の制御に続いて左右のタイヤの制動力の差によって車両を旋回させる回頭制御手段(S112-S122)と、車両の旋回方向を決定する障害物回避方向決定手段(S113,S121,S122)と、回頭制御手段(S112-S122)による各タイヤの制動制御の目標制動力を設定する回頭制御目標制動力設定手段(S118,S115)とを有する。
(もっと読む)
サスペンション制御装置、及びサスペンション制御方法
【課題】乗心地と接地性とのトレードオフの関係を改善する。
【解決手段】第一の算出部41は、検出したストローク速度に基づいて乗心地制御項となる第一の制御量を算出し、周波数特性調整部43は、検出した接地荷重の周波数特性を第一の制御量に基づいて調整し、第二の算出部44は、周波数特性を調整した接地荷重に基づいて接地性制御項となる第二の制御量を算出し、目標制御量演算部45は、第一の制御量及び第二の制御量に基づいて目標制御量を設定する。また、周波数特性調整部43は、先ず第一の制御量に基づいて電磁式ショックアブソーバ10を駆動制御すると仮定して、車輪の接地荷重が変化するときの応答特性L10を推定し、推定した応答特性L10と所定の基準応答特性L20との比較結果に基づいてフィルタ特性L30を決定し、このフィルタ特性L30を介して接地荷重の周波数特性を調整する。
(もっと読む)
車両ステアリング制御装置
【課題】スプリットμ路の路面状態と後輪操舵機能の故障時のトー角の方向とに応じて、ステアリング制御装置に最適な制御を行わせる車両ステアリング制御装置を提供する。
【解決手段】後輪操舵装置120が故障して故障フラグが1になるとスイッチ119aがONする。このとき、スプリットμ路における路面左右μ差信号と後輪操舵装置120の故障時の後輪舵角信号とが操舵方向決定部114に入力されてそれぞれの極性が比較される。ここで、路面左右μ差が右側高μ(+)であって、後輪舵角が左側(−)に傾いているときは、スプリットμ補正ゲインマップ117により補正ゲインを1より大きくし、スプリットμ制御部113の出力のスプリットμ制御信号に乗算して電動機4を制御する。これにより制動時における車両の走行方向を安定化させることができる。路面左右μ差信号と後輪舵角信号との極性比較により補正ゲインを増減させてスプリットμ制御を行う。
(もっと読む)
車両制御システム
【課題】複数の車両制御装置の間で起動条件の違いなどにより起動タイミングがずれることで、車両制御装置に故障がないにも拘わらず、適切な制御ができなくなることを避けることができるようにする。
【解決手段】RTCコントローラ1及びVSAコントローラ2を備え、このコントローラのうちの1つから他のコントローラに所要の信号が入力されない場合には、そのコントローラを故障と判断して他のコントローラの制御を禁止するようにした車両制御システムにおいて、当該車両の起動から所定の待ち時間が経過するまでは、1つのコントローラから他のコントローラに信号が入力されない場合でも、他のコントローラが制御を禁止するフェール状態とならないようにする。
(もっと読む)
1 - 20 / 85
[ Back to top ]