
Fターム[3D301EA85]の内容
Fターム[3D301EA85]に分類される特許
1 - 20 / 61
走行支援システム
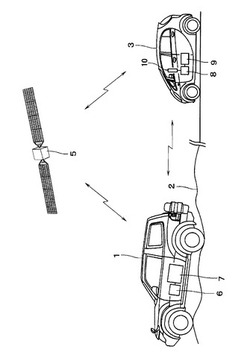
【課題】自車両の走破性能を調整して地図上にない走行経路や災害等で不整地となった走行経路の走行を支援する。
【解決手段】他車両1が地図上にない不整地2(走行経路)を走行した際の状況に基づいて自車両3が不整地2を走行できるか否かを判断し、自車両の走破性能で走行が可能であれば自車両3の走破性能を調整して走行を支援する。
(もっと読む)
車両用制御装置

【課題】車輪のキャンバ角をアクチュエータの駆動力により調整可能な車両に対し、消費エネルギーを抑制しつつ、車輪のキャンバ角が所定角度から変化することを抑制できる車両用制御装置を提供する。
【解決手段】路面に所定値以上の凹凸が存在する場合には(S105:Yes)、その凹凸を通過する際に車両に大きなサスペンションストロークが生じ、その状態で外力が作用すると、車輪のキャンバ角が所定角度から変化する可能性がある。よって、この場合には(S105:Yes)、第2補正手段を実行することで(S121)、車両が凹凸を通過する前にキャンバ調整機構をサーボロック状態に設定しておく。その結果、外力の作用により車輪のキャンバ角が変化することをより確実に抑制することができる。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
車両用制御装置
【課題】タイヤの偏摩耗を抑制して、タイヤの寿命を向上させると共に車両の走行安定性を確保することができる車両用制御装置を提供すること。
【解決手段】車輪にスリップが発生すると判断される場合に、車輪のキャンバ角が第2キャンバ角(第1キャンバ角よりも絶対値が小さいキャンバ角)に調整され、車輪へのネガティブキャンバの付与が解除されるので、タイヤの偏摩耗を抑制できる。即ち、車輪にスリップが発生するとタイヤの摩耗が進行し易いので、車輪のスリップが発生する場合に、車輪へのネガティブキャンバの付与を解除することで、接地面積を広げてタイヤの偏摩耗を抑制できる。その結果、タイヤの寿命を向上させることができる。また、タイヤの偏摩耗を抑制することで、タイヤの接地面が不均一となるのを防止して、車両の走行安定性を確保できる。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】前方車両との車間距離を大きく空けることなく車両から前方の視認対象物を視認可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車高の高さを調整する為の車高調整機構4を備えた車両に搭載され、自車両61が交差点で停車した場合において、現在の自車両61の車高Hと、前方車両62の車高h1と、前方車両62までの車間距離L1と、視認対象物である信号機63の高さh2と、信号機までの距離L2をそれぞれ取得し、取得された各値から自車両61から視認対象物である信号機63を視認する為の車高である設定車高を算出し、算出された設定車高に設定する為の信号を車両制御ECU9に対して出力し、自車両61の車高が設定車高となるように制御させるように構成する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両用制御装置
【課題】バッテリの残存容量の低下やバッテリの劣化を抑制できる車両用制御装置を提供すること。
【解決手段】バッテリ状態判断手段によりバッテリが充電不足であるか又は劣化しているか判断される。また、荷重判断手段により走行中に車輪の荷重が所定の条件を満たすか判断される。判断の結果、荷重が所定の条件を満たし、且つ、バッテリが充電不足である又は劣化している場合に、車輪のキャンバ角を絶対値が小さくなるように、キャンバ角調整装置が駆動されて調整される。荷重の小さな車輪のキャンバ角を絶対値が小さくなるように調整するので、キャンバ角調整装置の瞬間的な負荷を小さくすることができ、電力消費量を抑制できる。よって、バッテリの残存容量の低下やバッテリの劣化を抑制できる。
(もっと読む)
ダンパ装置
【課題】作動液が充填されたシリンダおよびピストンロッドを備えるシリンダ装置を備えるダンパ装置において、シリンダに対するピストンロッドの位置の調整量の増加およびダンパ装置の小型化を図る。
【解決手段】シリンダ11に対するピストンロッド16の往復運動を減衰させる減衰力が発生するダンパ装置1は、ピストンロッド16の往復運動により、第1流体室21とタンク30との間で作動液を移送するポンプ機構40と、ポンプ機構40とタンク30および第1流体室21との間の連通状態を設定する切換弁60とを備える。ポンプ機構40は、ピストンロッド16との協働によりポンプ室50を形成するポンプロッド41を備える。前記連通状態は、タンク30の作動液がポンプ室50を介して第1流体室21に導かれる第1連通状態と、第1流体室21の作動液がポンプ室50を介してタンク30に導かれる第2連通状態とである。
(もっと読む)
車両用制御装置
【課題】燃費の悪化や車輪の偏摩耗が生じることを防ぐと共に、車両の走行安定性を向上させることのできる車両用制御装置を提供すること。
【解決手段】車両用制御装置100は、スリップ角に対するセルフアライニングトルクを角度で微分した角度微分値が所定の第1閾値以下であるかを判断し、角度微分値が第1閾値以下であると判断される場合に車輪のキャンバ角を調整する第1キャンバ角調整手段を備えているので、横力が飽和してグリップ力の限界に近付くことを予測し、車輪のグリップ力が限界を超える前にキャンバスラストを発生させて、著しいアンダーステア傾向、オーバーステア傾向やスピンなどの発生を未然に防止することができる。これにより、車両の走行安定性を向上させることができると共に、長時間に亘ってキャンバ角が付与されることによる燃費の悪化や車輪の偏摩耗が生じることを防止できる。
(もっと読む)
車両用空気ばね装置
【課題】車両の台車と車体との間に二次ばねとして設置される空気ばねの減衰性能が、路線の全区間における区間条件、或いは全速度条件において車両の走行地点や走行速度に応じて的確に調整されるようにして車両の乗り心地を向上させることを課題としている。
【解決手段】台車と車体との間に配置する空気ばね10の内室11と外部の補助空気室12との間の空気通路に駆動源6を含む可変オリフィス4を設け、車両の走行地点又は走行速度に応じて設定した最適なオリフィス径を制御装置8に予め入力し、この制御装置からの指令で設定地点又は設定走行速度のときに設定されたオリフィス径となるように前記可変オリフィスを制御するようにした。
(もっと読む)
キャンバ制御装置
【課題】タイヤの偏摩耗が進むのを抑制することができ、タイヤの寿命を長くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、タイヤが使用された区間におけるキャンバの累積変量を記録するための累積変量記録部と、累積変量記録部に記録されたキャンバの累積変量に対応させて、キャンバ可変機構によって前記所定の車輪に負のキャンバを付与するキャンバ付与処理手段とを有する。キャンバの累積変量に対応させてキャンバが付与されるので、タイヤの寿命を長くすることができる。
(もっと読む)
キャンバ制御装置
【課題】タイヤの寿命を長くすることができ、燃費を良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両の走行状態が安定しているかどうかを判断する走行安定状態判定処理手段と、車両の走行状態が安定している場合に、前記所定の車輪に負のキャンバを付与するキャンバ付与処理手段とを有する。車両の走行状態が安定している場合に負のキャンバが付与されるので、負のキャンバが付与される頻度を低くすることができ、しかも、負のキャンバが付与される時間を短くすることができる。
(もっと読む)
アクチュエータ
【課題】液圧式であっても車両における乗り心地を向上することが可能なアクチュエータを提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段におけるアクチュエータAは、鉄道車両の車体Bと台車Wとの間に介装されるシリンダCとシリンダCに液圧を供給するモータMで駆動される液圧ポンプ1とを備え、車体Bを台車Wに対して傾斜させるアクチュエータAにおいて、鉄道車両が直線走行中には見掛け上の剛性を低くすることを特徴とする。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
リアトー制御装置
【課題】車両が所定の種類の施設の位置にあるときは、運転者の駐車操作を支援するように後輪のトー角を設定するリアトー制御装置を提供する。
【解決手段】駐車場や洗車場など、車両Vを駐車する施設を所定の種類の施設とする。車両Vのナビゲーション装置8は、車両Vの位置が所定の種類の施設の位置と一致したこと、又は車両Vの位置が所定の種類の施設の位置の近傍であることを検出すると、車両制御ECU10にナビゲーション信号Nsを入力するように構成する。そして、車両制御ECU10は、ナビゲーション信号Nsが入力されたら、左右の後輪2L,2Rをトーインにする指令を、トー角変更制御ECU37を介してアクチュエータ30に与え、アクチュエータ30が動作して左右の後輪2L,2Rをトーインにする。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】必要なエネルギー量に対する管理を行うことを可能とした走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】車両2の走行予定経路を特定し、走行予定経路の経路情報を取得し、取得した走行予定経路の経路情報に基づいて、走行予定経路を走行する場合に必要な車両2の駆動力を区間毎に推定し、推定された区間毎の車両2の駆動力に基づいて、車両2が走行予定経路を走行する際における区間毎の車輪5FL〜5RRのグリップ特性及び転がり抵抗を決定し、決定された区間毎の車輪5FL〜5RRのグリップ特性及び転がり抵抗に基づいて、車両2が前記走行予定経路を走行する際における区間毎のキャンバー角調整装置22の制御スケジュールを生成するように構成する。
(もっと読む)
車両の圧縮空気準備装置用制御装置、圧縮空気準備装置及びその制御方法
本発明は、車両(2)の圧縮空気準備装置(1)用制御装置(3)に関し、制御装置(3)が圧縮空気準備装置(1)の供給段階及び再生段階を設定する出力信号を出力し、供給段階において圧縮機(4)が、乾燥剤(6a)を持つ空気乾燥機(6)を経て、圧縮空気を圧縮空気溜め(8)へ供給し、再生段階において圧縮空気が、圧縮空気溜め(8)から、空気乾燥剤(6a)を乾燥させるため空気乾燥機(6)を通して導かれる。
本発明によれば、制御装置(3)が、車両(2)の現在又は将来の機関負荷及び/又は車両(2)の現在又は将来の圧縮空気消費に関係して、再生段階を設定する。この場合特に押し動かし段階において、一層低い湿度へ乾燥剤の過度の乾燥を行って、後の区間部分において燃料を節約することができる。更に乾燥剤の区間を最適化される再生が、機関負荷及び/又は利用段階に従って可能である。
(もっと読む)
車両制御装置
【課題】ドライバにとって快適な車両運動を実現することができるようにする。
【解決手段】走行環境検出部50によって走行路状態を検出し、操舵周波数検出部52によって操舵周波数を検出する。車両特性設定部54によって、走行路状態、操舵周波数、又は切り替えスイッチ18のオンオフ状態に基づいて、目標となる車両運動の特性を設定する。位相差決定部56によって、設定された車両運動特性に応じて、ヨー角速度の変化に対する横加速度の変化の位相差を示す第1変化差と、横加速度の変化に対するロール角速度の変化の位相差を示す第2変化差とを決定する。そして、操舵角制御部64によって、決定された第1変化差が実現されるように、前後輪の各々の操舵角を制御し、減衰特性ばね力制御部60によって、決定された第2変化差が実現されるように、サスペンションの減衰特性及びばね力を制御する。
(もっと読む)
スタビライザ制御システム
【課題】ねじり剛性の大きさを任意に設定することができ、ねじり剛性の切り替えをスムーズに行うことが可能なスタビライザ制御システムを提供する。
【解決手段】スタビライザ制御システムは、左右の車輪WL,WRに接続される第一のトーションバー10Aと、第一のトーションバー10Aの径方向外側に、第一のトーションバー10Aに対して相対回動不能に設けられる第二のトーションバー20Aと、第一のトーションバー10Aの径方向外側に、第一のトーションバー10Aに対して相対回動可能に設けられるシュー部30Aと、第二のトーションバー20A及びシュー部30Aの少なくとも一方に、第一のトーションバー10Aの軸方向に移動させる力を付与する移動力付与部40と、移動力付与部40によって付与される力を調節することによって、第二のトーションバー20Aとシュー部30Aとの当接状態を制御する当接状態制御部60と、を備える。
(もっと読む)
車両の運動制御装置
【課題】ナビゲーション装置が装備されない車両であっても路面状況等に応じたサスペンション制御等の運動制御を行うことができ、複雑な路面検出装置を特別に設ける必要がなく、コストダウンを図ることができる車両の運動制御装置を提供する。
【解決手段】この車両の運動制御装置は、車両10が走行する地域を複数のエリアに区分けし、複数のエリアの各々のエリア情報を記憶するメモリ52と、車両に係る自車位置を検出する自車位置検出手段53と、メモリ52に記憶されたエリア情報と、自車位置検出手段53で検出された自車位置に係る情報とに基づき、車両の走行運動を制御する制御装置51と、を備えるように構成される。
(もっと読む)
1 - 20 / 61
[ Back to top ]