
Fターム[3D301EC33]の内容
Fターム[3D301EC33]の下位に属するFターム
不感帯幅、位置の変更 (8)
Fターム[3D301EC33]に分類される特許
1 - 20 / 91
減衰力調整式シリンダ装置
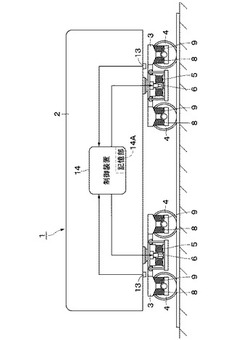
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
作業車

【課題】走行機体がサスペンション機構を介して走行装置を支持する作業車において、走行機体の対地高さを所定高さに維持させることができるとともに耐久性および応答性で優れたものにする。
【解決手段】サスペンション機構の作動を機体上昇側及び機体下降側に変更自在な作動変更手段を備え、サスペンション機構の作動の昇降変位を検出する昇降検出手段41による検出情報を基に、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を操作する制御手段40を備えてある。サスペンション機構が作動停止状態になると、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を昇降検出手段41による検出情報に基づく制御手段40の制御に優先して操作する補助制御手段45を備えてある。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
サスペンション装置
【課題】インパクトショックのばね上部材への伝達を効果的に低減することができ、かつ、経済的なサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両におけるばね上部材とばね下部材との間に介装されてばね上部材とばね下部材との相対移動を抑制する減衰力を発揮する緩衝器2と、当該緩衝器2における減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、上記緩衝器2の収縮速度が所定の速度閾値α以上となるとともに、収縮速度の変化量が所定の速度変化量閾値β以上となると、当該緩衝器2の収縮側減衰力を最小とすることを特徴とする。
(もっと読む)
サスペンション装置
【課題】操舵初期における車体のロールを充分に抑制でき、さらには、車体の左右の揺り返しを防止し、車両における乗り心地を向上させることができるサスペンション装置を提供することである。
【解決手段】緩衝器2nと、当該緩衝器2nにおける減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構を制御する制御装置4とを備えたサスペンション装置1において、車体Bの横加速度Gを検知する横加速度検知部5と、車体Bのロール角速度ωを検知するロール角速度検知部6と、操舵輪Sの舵角速度θを検知する舵角速度検知部7とを備え、制御装置4は、舵角速度θが所定の不感帯域を超えると、舵角速度θから求めた減衰力Fθと、横加速度Gから求めた減衰力FGと、ロール角速度ωから求めた減衰力Fωのうち、最大の減衰力を操舵初期加算減衰力とし、当該操舵初期加算減衰力を用いて緩衝器が発生すべき最終減衰力Dnを求めて緩衝器2nを制御する操舵初期制御を行う。
(もっと読む)
キャンバ角制御装置
【課題】 キャンバ角の調整を車両の状態にあわせて的確に実行させるキャンバ角制御装置を提供する。
【解決手段】 車体120に設置され駆動力を発生するモータ102a及びモータ102aの発生した駆動力を出力する出力軸102bを有する駆動部材102と、出力軸102bに連結され駆動部材102の回転を減速する減速部103と、減速部103と連結されるクランク軸104a及びクランク軸104aに対して偏心したクランクピン104bを有するクランク部104と、一端の第1連結部151aでクランクピン104bに連結される連結部材151と、車体120に連結されると共にキャンバ軸CAを形成するキャンバ部材156bと、車輪2を回転可能に支持すると共に、鉛直方向の一方側でキャンバ部材156bに回動可能に支持され、他方側で連結部材151の他端に第2連結部151bで連結される回動部材133と、車体120の状態に応じて、第1連結部151aの回転方向を上回し又は下回しに選択して制御する制御部70と、を備えることを特徴とする。
(もっと読む)
キャンバ角制御装置
【課題】キャンバ角を調整する際に部品の摩耗を考慮して制御するキャンバ角制御装置を提供する。
【解決手段】車体に設置され駆動力を発生するモータ102a及駆動力を出力する出力軸102bを有する駆動部材102と、回転を減速する減速部103と、出力軸102bと同一軸上の中心線を中心に回転するクランク軸104aと平行に連結されクランク軸104aを中心に回転するクランクピン104bを有するクランク部104と、一端の第1連結部151aでクランクピン104bに連結される連結部材151と、キャンバ軸を形成するキャンバ部材と、鉛直方向の一方側でキャンバ部材に回動可能に支持され、他方側で連結部材151の他端に第2連結部151bで連結される回動部材と、連結部材151の上回し回数と下回し回数に応じて前記第1連結部を上回し又は下回しに選択して回転させる制御部とを備える。
(もっと読む)
キャンバ角制御装置
【課題】キャンバ角調整時の車両の走行安定性の迅速化及び節電を確保するキャンバ角制御装置を提供する。
【解決手段】車体に設置されるモータ102aの発生した駆動力を出力する出力軸102bを有する駆動部材102と、駆動部材102の回転を減速する減速部103と、出力軸102bと同一軸上の中心線を中心に回転するクランク軸104a及びクランク軸104aを中心に回転するクランクピン104bを有するクランク部104と、一端の第1連結部151aでクランクピン104bに連結される連結部材151と、キャンバ軸を形成するキャンバ部材と、車輪を回転可能に支持すると共に、鉛直方向の一方側でキャンバ部材に回動可能に支持され、他方側で連結部材151の他端に第2連結部で連結される回動部材と、第1連結部151aの回転方向を、回転時間の短い方向に制御する制御部を有する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角をアクチュエータの駆動力により調整可能な車両に対し、アクチュエータの消費エネルギーを低減することができる車両用制御装置を提供する。
【解決手段】車輪を保持するキャリア部材41をアッパーアーム42及びロアアーム43により上下動可能に車体に連結し、アッパーアーム42の一側をホイール部材93aの軸心O1から偏心した位置(軸心O2)に連結する。サスストロークに伴い、軸心O1が軸心O1及び軸心O3を結ぶ直線上に位置しなくなった場合には、その分、ホイール部材93aを回転駆動して補正する。これにより、車輪のキャンバ角を機械的な摩擦力により維持し易くすることができるので、車輪のキャンバ角を所定角度に維持するために必要なモータの駆動力を小さく又は解除して、その消費エネルギーの低減を図ることができる。
(もっと読む)
車両用サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体と車輪との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が閾値K1よりも小さく閾値K2よりも大きい範囲では、補正相対速度V2ofsとして正負が反転しない値を出力する。これにより、発生減衰力がハードとソフトとの間でチャタリングを起こすように変化するのを防止する。
(もっと読む)
車両用制御装置
【課題】バッテリの残存容量の低下やバッテリの劣化を抑制できる車両用制御装置を提供すること。
【解決手段】バッテリ状態判断手段によりバッテリが充電不足であるか又は劣化しているか判断される。また、荷重判断手段により走行中に車輪の荷重が所定の条件を満たすか判断される。判断の結果、荷重が所定の条件を満たし、且つ、バッテリが充電不足である又は劣化している場合に、車輪のキャンバ角を絶対値が小さくなるように、キャンバ角調整装置が駆動されて調整される。荷重の小さな車輪のキャンバ角を絶対値が小さくなるように調整するので、キャンバ角調整装置の瞬間的な負荷を小さくすることができ、電力消費量を抑制できる。よって、バッテリの残存容量の低下やバッテリの劣化を抑制できる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の変更に伴う車両の挙動特性の変化に関する指標値を運転者の癖等を考慮して算出し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両1の状態に応じてキャンバ角調整装置44を制御し、車両1の後輪のキャンバ角を調整する。車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、単位ヨーレートゲインを算出する。車両用制御装置100は、算出対象期間TP内の単位ヨーレートゲインに基づく期間内平均値を算出する。そして、当該車両用制御装置は、同一のキャンバ状態における右操舵時の期間内平均値と、左操舵時の期間内平均値を平均し表示用ヨーレートゲインを算出する。
(もっと読む)
車両、及び車両制御プログラム
【課題】車体の傾斜を許容角度以内に保ちながら旋回時の安定性を実現する。
【解決手段】車両1は、車体部10の傾斜角度を監視し、傾斜角度が所定の限界値に達する場合、スロットル開度センサ12のスロットル開度Sに対する駆動輪のトルクゲインを低く調節する。即ち、傾斜角度が限界値を越えそうな場合、スロットル操作の効き具合をなまらせる。これにより、傾斜角度が限界値を超えるような車速を抑制することができ、車両1は、安定して旋回することができる。また、車両1は、傾斜角度の検出値に、当該検出値の微分を加えることにより傾斜角度の直近の未来の値を予測し、車体部10の傾斜角度として当該予測値を用いることにより精度の高い制御を行っている。
(もっと読む)
ショックアブソーバ装置
【課題】 ブラシ付モータ40の回転が急停止したときにブラシ部に発生する大きな火花によりブラシの寿命が低下しないようにする。
【解決手段】 電磁式ショックアブソーバ30が伸長動作をしており、そのストローク速度Vsが第1基準速度Vs1より大きく、かつ、ばね上部の移動方向が下向きである場合に、ECU50は、電磁式ショックアブソーバ30の伸長動作が急激に停止すると予測して、第2スイッチング素子SW2をオフにする。これにより、電磁式ショックアブソーバ30が急激に停止してもモータ40に電流が流れないため、ブラシ部での火花の発生を防止できる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
車両挙動制御装置
【課題】高速旋回走行時など、車輪の接地荷重が増大した場合にも円滑な操舵制御を実現するための車両挙動制御装置を提供する。
【解決手段】ECU20は、ステップS2で後輪目標舵角δrrtと後輪実舵角δrrrとの差Δδrrが異常判定閾値δthを超えたか否かを判定し、この判定がYesになると、ステップS3で横Gセンサ12から入力した横加速度Gyが加速度判定閾値Gythを超えたか否か、すなわち後輪操舵アクチュエータ8rが作動遅れが右後輪3rrの接地荷重の増大によって引き起こされたか否かを判定する。ステップ3での判定がYesであった場合、ECU20は、ステップS4で接地荷重低減指令を減衰力制御部22の減衰力補正部32に出力し、後輪3rのダンパ4rの目標減衰力を低下させるように補正する。
(もっと読む)
減衰力制御装置
【課題】 バルブによる減衰力特性段数の切換作動のハンチングの発生を防止することができる減衰力制御装置を提供すること。
【解決手段】 バルブ31により段階的に切り換えられるダンパの減衰力特性のうち、隣接する減衰力特性間に中間帯域が設定される。要求減衰力が中間帯域に属する場合には、要求段数は、その中間帯域を挟む隣接する減衰力特性を表す2つの段数のうちのいずれか一方に一律に設定される。したがって、要求減衰力が2つの減衰力特性の中心付近を推移した場合には、要求減衰力は中間帯域に属する減衰力となり、その推移の変動によって要求段数が変化することはない。これにより減衰力特性段数の切換作動のハンチングを防止できる。
(もっと読む)
挙動制御装置の中立位置決定装置及び方法
【課題】アクチュエータを備えるスタビライザにおいて当該アクチュエータの中立位置を正確に決定する。
【解決手段】スタビライザアクチュエータ310によりスタビライザバー320及び330を相対回転させ、車体のロールを抑制するスタビライザ300を備える車両10において、ECU100は、中立位置決定処理によりスタビライザアクチュエータ310の中立位置を決定する。当該制御において、ECU100は、横方向加速度Gyが不感帯領域に入る前の車両10の旋回方向毎に、スタビライザアクチュエータ310の回転角δactを暫定中立位置として記憶し、旋回方向毎にそれらを平均化して、旋回方向毎の平均中立位置を算出する。更に、この平均中立位置を旋回方向相互間で平均化して中立位置δntlを決定する。
(もっと読む)
走行状況報知装置
【課題】 運転操作や路面状態を運転者に適切にフィードバックする。
【解決手段】 報知信号生成部24は、ステップS21で各ダンパ4の駆動電流Idrの平均値(平均駆動電流)Idaを算出した後、ステップS22で平均駆動電流Idaの値が所定の第1報知判定閾値Ith1を上回ったか否かを判定する。自動車Vが急旋回や急加減速してステップS22の判定Yesになると、報知信号生成部24は、ステップS24で平均駆動電流Idaに所定の第1ゲインを乗じて振動報知信号Sbを生成した後、ステップS25で振動報知信号Sbに基づいて両バイブレータ15,17を駆動する。これにより、運転者は、アクセルペダルPaやブレーキペダルPbを介して足裏に振動を感じ、急激なステアリング操作やアクセル/ブレーキ操作を行ったことを認識できる。
(もっと読む)
1 - 20 / 91
[ Back to top ]