
Fターム[3F029EA02]の内容
物品の積み重ね及び付属装置 (962) | 付属装置 (51) | スペーサ供給装置 (13) | シート状 (9)
Fターム[3F029EA02]に分類される特許
1 - 9 / 9
合紙の配置方法
【課題】連続した合紙を2枚の板の間に配置すると共に、適切な長さに切断する、合紙の配置方法を提供する。
【解決手段】板を上昇させる工程と、上方に配した板の直下位置に、別の板を配置する工程と、上方に配した板と、下方に配した板の間に、合紙を配置する工程と、上方に配した板を降下し、合紙を介して下方に配した板の上に配置する工程とからなる合紙の配置方法。合紙の配置は、連続した合紙の端部を固定した状態で、該合紙を、上方に配した板の下を、該板の長手方向に引き延ばすことにより行う。上方に配した板を降下する前、又は、降下中、又は、降下した後に、引き延ばした合紙を、下方に配した板の長手方向の長さと同等以上の長さで切断するとともに、該合紙の端部の固定を解除する。
(もっと読む)
積層体形成装置、積層体形成方法、ガラス基板の製造方法、ガラス基板及び磁気記録媒体

【課題】 積層体の形成を自動化できる装置を提供する
【解決手段】積層体形成装置200はガラス基材載置部21とスペーサ載置部18を有し、ガラス基材載置部21とスペーサ載置部18の間には積層体載置部17を有している。
ガラス基材載置部21にはエアシリンダ20および電動アクチュエータ19が設けられ、これらの装置によってB1、B2、C1、C2の向きに移動可能である。
また、積層体形成装置200は側壁4がE1、E2の向きに移動可能に設けられている。
さらに、側壁4には側壁8が移動可能に設けられている。
また、側壁8にはガラスチャック10およびスペーサチャック13がD1、D2の向きに移動可能に設けられている。
(もっと読む)
保持搬送装置
【課題】種々の重量や形状を有する物品を、塑性変形や破損を起こさせることなく、且つ充分な吸引力によって安定して保持して搬送することが可能な保持搬送装置を提供する。
【解決手段】本発明の保持搬送装置1は、複数の吸引孔を有する物品吸着面が設けられた吸引ヘッド2と、吸引ヘッド2の吸引室9に連結された負圧供給手段4とを備えている。この負圧供給手段4は、吸引ヘッド2が物品吸着面に物品を当接させて物品を吸引保持する際に、前記物品吸着面のほぼ全領域に前記物品が配置されて大多数の吸引孔から外気を直接吸引しない状態で前記物品をほとんど塑性変形させることなく吸引保持することができ、且つ、前記物品吸着面に物品が当接していない領域が広く前記物品に当接していない多くの吸引孔から外気を直接吸引する状態でも物品の吸引保持を維持できるような負圧を吸引ヘッド2にもたらすことができるよう広い風量の領域に対して低くフラットな吸込み側静圧特性を有している。
(もっと読む)
パケットパレタイジング装置の受取ステーションならびにその種の受取ステーションによる把持装置へのパケットの移転方法
【課題】極めて多様な幅のパケットをパケット把持器具に移転することができ、それにもかかわらず比較的小幅に形成することができる、パケットパレタイジング装置の受取ステーションを提供する。
【解決手段】第1および第2の推進手段31,32の間に第3の推進手段33を配置する。第3の推進手段33が第1の洞室A内あるいは第2の洞室B内のいずれかに存在しその第3の推進手段33が存在する方の洞室A;Bが別の一方の洞室よりも著しく幅広になるような様式で第1および第2の心合せ手段C,Dを相対的に位置調節可能にする。
(もっと読む)
薄板状基板の梱包方法および梱包装置
【課題】合紙の使用枚数を半減することができる薄板状基板の梱包方法および梱包装置を提供する。
【解決手段】吸着パッド11は、合紙2の切れ目部分21を吸着し、吸着した切れ目部分21を、切れ目に沿って斜め上方に持ち上る。移載アーム12は、1枚の薄板状基板3を吸着し、吸着した薄板状基板3を合紙2のベース部分23の上に載せる。吸着パッド11は、吸着して持ち上げていた切れ目部分21を下ろし、ベース部分23の上に載せられた薄板状基板3の上に、吸着した切れ目部分21を被せるように載せ、吸着を解除する。移載アーム12は、次の薄板状基板3を吸着して搬送し、1つ前の薄板状基板3の上に載せられた切れ目部分21の上に、吸着した薄板状基板3を載せる。吸着パッド11および移載アーム12は、積み重ねた薄板状基板3の枚数が、予め定める枚数になるまで、この一連の動作を繰り返す。
(もっと読む)
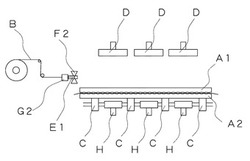
ガラス搬送ロボットハンド
【課題】 搬送ロボットハンドにより、ガラス板をパレットへ積みつける際に、ガラス板のズレ現象を防止するため、合紙をガラス板間に挟むようにするが、その合紙もガラス板と同時にパレットへ搬送できるロボットハンドにする。しかし、その搬送の際に風圧による合紙のめくれと、パレット積載時の合紙の垂れ下がりとによるトラブルを防止し、効率的なガラス搬送ロボットハンドを提供する。
【解決手段】 二つの課題を解決するため、ガラス搬送ロボットハンド10に吸着されたガラス板1面前に対向して合紙2を配置させると共にそれら面間にブローによるブローダウンする風を送り吸着させ、その風向をガラス面と合紙の4角の対向面方向に特に向け、搬送中のめくれ、と、積付け時の垂れ下がりを発生させないことを特徴とするガラス搬送ロボットハンド。
(もっと読む)
瓶群移載方法及び瓶群移載装置
【課題】瓶群の整列状態を維持して移載することで、瓶の損傷や破損等を防止することができる瓶群移載方法及び瓶群移載装置を提供する。
【解決手段】中央部又は下部の太さが上部の太さより太い複数の瓶Bを各瓶Bの軸線方向が上下方向となり且つ各瓶Bの中央部又は下部が互いに接するように瓶Bを載せるための第1台の上で整列させた瓶群を、各瓶Bの整列位置を保持するように瓶群の中央部又は下部の周囲を囲った状態で瓶群を押して第1台の上を摺動させることによって、第1台よりも瓶群の摺動方向下流側であって第1台よりも下側に配置された第2台に瓶群を移載する瓶群移載方法において、瓶群を形成する各瓶Bの上部同士の間の隙間に瓶Bの傾きを抑制するための傾き抑制部材8を設けた状態で瓶群を移載する。
(もっと読む)
物品のパレタイズ包装・供給方法およびパレタイザー
【課題】物品の効率な流通を可能とするパレタイズ包装・供給方法を提供する。
【解決手段】物品を製造する製造工程と、製造工程にて製造された物品を検査する検査工程と、検査工程にて検査された物品を複数平面状に整列させると共に、間に仕切部材を介在つつ多段に積載して包装する梱包工程と、梱包工程にて包装された梱包体を配送先に配送する配送工程と、配送された梱包体を開梱し、物品を整列状態にて排出する開梱工程とを含む。
(もっと読む)
交互の層状に積み重ねるボトルのパレット搭載方法
交互の層状に積み重ねるとともに層間シートを挿入することにより、立った状態で正方形に整列されたボトルのパレット搭載方法であって、a内径の大きい把持ヘッドにより、一バッチのボトルを取る段階と、bバッチのボトルをテンプレート上に設置する段階と、c把持ヘッドの圧力を解放する段階と、dボトルの首部に層間シートを押し込む段階と、e前記テンプレートと前記層間シートとの双方により押し込まれたボトルの位置に適合している把持ヘッドの圧力を回復させる段階と、fバッチをパレット搭載ステーションへ移送する段階と、g前記ボトルをパレットの上に設置し、前記把持ヘッドの圧力を解放する段階と、次に、h希望する層数になるまで前記の段階を繰り返す段階と、を有し、前記テンプレート11は前記収集ステーションと前記パレット搭載ステーションの間に設置されていることを特徴とするボトルのパレット搭載方法。 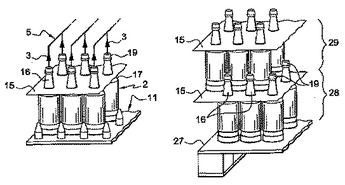 (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]