
Fターム[3F079CA26]の内容
物品の選別 (7,206) | 選別(検知、検査、測定対象) (1,629) | 被選別物の状態、特性 (1,322) | 面積 (15)
Fターム[3F079CA26]に分類される特許
1 - 15 / 15
莢果選別装置
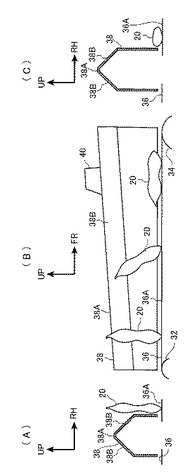
【課題】莢果を適切に搬送する。
【解決手段】莢果選別装置10では、コンベヤベルト36の移動部36Aに莢果20が落下されて供給されると共に、コンベヤベルト36が回動されて移動部36Aが前側に移動されることで、莢果20が前側に搬送される。ここで、移動部36Aの側方の仕切枠38では、傾斜部38Bが前方へ向かうに従い上方へ向かう方向に傾斜されている。このため、仮に、移動部36Aに供給された莢果20が傾斜部38Bに引っ掛かることで起立姿勢にされても、移動部36Aの移動により莢果20が前側に搬送されることで、傾斜部38Bが莢果20から離間されて、莢果20の傾斜部38Bへの引っ掛かりが解除される。これにより、莢果20が転倒されることで、莢果20を移動部36A上に寝姿勢で載置できるため、莢果20を適切に前側に搬送できる。
(もっと読む)
大塊搬送物検知システム

【課題】大塊搬送物を好適に検知することが可能な大塊搬送物検知システムを提供する。
【解決手段】大塊ずり検知システム1は、ずり2を搬送するベルト12を有するベルトコンベア10と、ベルト12上のずり2に光を照射する照明部30と、光が照射されたずりを時間を空けて複数回撮影する撮影部40と、ずりに一方から光が照射された時刻t1に撮影された第一の画像とベルト12の走行によってずりに他方から光が照射された時刻t2(>t1)に撮影された第二の画像とに基づいて、大塊ずりを検知する大塊ずり検知部53bと、を備え、大塊ずり検知部53bは、ベルト12の速度をvとしたとき、v・(t2−t1)に基づいて第一の画像及び第二の画像の位置合わせを行って第一の画像及び第二の画像の論理積画像を生成し、論理積画像から大塊ずりを検知する。
(もっと読む)
選果システム
【課題】載置台上の適正位置に青果物が載置されていない場合には、上流側に戻すようにする選果システムを提供する。
【解決手段】主搬送手段2には上流側から青果物6を載置台5上に載せる載置工程11と、青果物6の品質を測定する品質計測工程12・13・14と、品質計測工程12・13・14の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程15とが設けられる選果システム1において、パック詰め工程15には、青果物6のがく片6b側を吸着してパック48に整列して詰めるパック詰めロボット33を備え、品質計測工程12・13・14と主搬送手段2の最上流端とを主搬送手段2とは別途に繋ぐリターンライン16が備えられ、品質計測工程12・13・14で、載置台5に対するがく片6bの載置位置が適正であるかを検知し、適正でない場合はリターンライン16を経て載置台5を主搬送手段2の最上流に戻すものとする。
(もっと読む)
外観検査装置
【課題】加工部品や薬剤等の商品の形状や色に関係なく、外観の欠陥を精度良く、かつ経済的に検査し、不良品を除去可能な外観検査装置を提供する。
【解決手段】検査対象物を表裏区別することなく供給する供給部Aと、
供給された検査対象物の上側面を撮像して表裏を判定し、上側面が表であるものと裏であるものを仕分けする表裏判定・仕分け部Bと、
表を先に検査し、反転させてから裏を検査する第1搬送レーンと、裏を先に検査し、反転させてから表を検査する第2搬送レーンとから構成される検査部C
とを具備し、各搬送レーンには、多種多様の表面異常が検知できるように複数の検査カメラが設置され、撮像された画像データの画像処理により、不良品であると判断されたものは排出手段にて搬送レーンから排出される。
(もっと読む)
パターン認識を利用した検査装置及び方法
検査装置は、イメージ化ゾーンへ物品の流れを送る供給システムを備える。カメラは、上記ゾーンにおいて上記流れからコンピューター処理用のイメージデータを生成する。コンピューターは、イメージデータから複数エリア内の欠陥を識別し、該欠陥をランク付けするためのパターン認識システムを備える。該システムは複数の欠陥基準に従って動作するようにプログラムされている。コンピューターはまた、GUIに接続されて、上記イメージデータから識別されたエリアを、複数の欠陥基準のそれぞれにおいて、該エリア内で識別された欠陥のランクに従って配置されたサムネイルとしてGUI上に表示する。生成されたイメージデータからのエリアは、通常、それぞれの識別された欠陥の周りに、該欠陥を中心として定められる。これらエリア即ちサムネイルは重複可能である。 (もっと読む)
グラフィカルユーザーインターフェースを利用した選別装置及び方法
選別装置は、物品の流れを自由飛行状態で選別ゾーンへと送る供給システムを具備し、選別ゾーンのエジェクターは選択的に作動して上記流れから物品を排除し、カメラは選別ゾーンの上流のイメージ化ゾーンに配されてコンピューター処理されるイメージデータを生成し、該コンピューター処理により1つ或いは複数の選別基準に従って選別ゾーンで排除するべき物品が識別され、該コンピューターが処理データに基づいてエジェクターに指示を出す。また該コンピューターは、グラフィカルユーザーインターフェースに接続されていて、該インターフェースにイメージ化ゾーンの生産物の流れのイメージを表示すると共に、作動したエジェクターと生産物の流れとの交差エリアを示す。また、排除パラメーターを調整して交差エリアの境界を移動させることができる。 (もっと読む)
異物選別方法および異物選別設備
【課題】形状が不揃いで色が異なるもの同士を確実に選別し得る異物選別方法を提供する。
【解決手段】カメラ装置3で撮影された画像データを異物抽出部21に入力して色彩情報に基づき物体を抽出し、計量的異物判断部23にて、抽出された物体の画像データにおける面積・長さなどの大きさを表わす計量的特徴量に基づき物体が異物であるか否かを判断し、異物でないと判断された残りの物体の画像データから選別対象物体であると判断し得る色彩的特徴量を抽出し、色彩的異物判断部25にて、色彩的特徴量に基づき異物であるか否かを判断し、異物でないと判断された残りの物体の画像データから選別対象物体であると判断し得る丸さ・細長さなどの形状を表わす形状的特徴量を抽出し、形状的異物判断部27にて、形状的特徴量に基づき異物であるか否かを判断し、上記各判断において、異物であると判断された物体を、ベルトコンベヤ上から除去する方法である。
(もっと読む)
莢果判別構造
【課題】莢への豆の収容状態を適切に判別する。
【解決手段】莢果選別装置10では、莢果18が、第2ベルト30によって前方へ搬送されて、光電センサ32の投光部34と受光部36との間を通過することで、投光部34が投光して莢果18に遮られない光を受光部36が受光して、光電センサ32が莢果18の位置毎の厚さを測定する。これにより、莢果18の所定厚さ以上の位置の数と莢果18の所定厚さ未満の位置の数とに基づき、莢20への豆22の収容状態を適切に判別できる。
(もっと読む)
殻付ピスタチオ粒の選別装置
【課題】殻付のピスタチオの独特の形状、及び裂け目から露出する種子の色といった人為的に定めた基準であっても、精度よく選別することができる。
【解決手段】受光手段20からの画素信号を、第1しきい値を利用して2値化処理し、殻付ピスタチオ粒の殻果の外形の大きさを演算する第1演算処理ユニット28と、受光手段20からの画素信号を、第1しきい値とは異なる第2しきい値を利用して2値化処理し、殻付ピスタチオ粒内の殻果に生じる裂け目部の大きさを演算する第2演算処理ユニット29と、第1演算処理ユニット28及び第2演算処理ユニット29により演算した値で作成した画像に基づき、殻付ピスタチオ粒内の裂け目部の存在が検知されないときに、当該殻付ピスタチオ粒を未熟粒と判定して除去手段11に除去信号を出力する良品・不良品判定回路36とを備えた。
(もっと読む)
リジェクト率制御の物品搬送装置
本発明は、扁平物を搬送するための装置であって、扁平物(E)が通常は一定の間隔幅(P)で組に分かれて順次移動される搬送装置に関する。装置は、上記間隔幅の一定の変動を補償するための同期システム(9)を備える。上記システムは、物品の一定の物理特性に基づいて物品を分類するための手段(8、11)と、取り扱い中の物品の間隔幅の一定の変動を検出し、上記間隔幅変動を取り扱い中の物品のカテゴリに従ってメモリ内に記憶するための手段(7、8、12)と、上記物品のカテゴリに従ってメモリ内に記憶された上記間隔幅変動に基づいて同期システムを制御するための手段(8、12)とを含む。 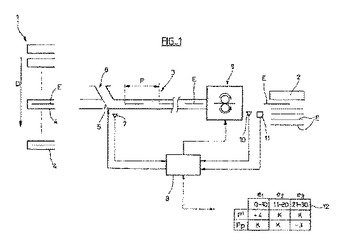 (もっと読む)
(もっと読む)
農産物の選別装置
【課題】農産物を仕分排出位置に向けて搬送する際、農産物を一定位置あるいはランダムに載置するという載置態様によって仕分排出位置での排出方式を選択できるようにする。
【解決手段】個々に傾倒可能な複数の支持片により構成したバケット単位を無端回動可能に多数連結したPKコンベア10搬送手段に対し、バケット単位を農産物の搬送の1単位として使用する場合にはバケット単位でその複数の支持片を傾倒させて農産物を排出させ、無端回動する多数の支持片に農産物をランダムに載置して搬送する場合には農産物が載置されている支持片を傾倒させて農産物を排出させる。
(もっと読む)
花卉選別方法及びその装置
【課題】花卉の等階級を判定するのに必要とする精度の高い情報が得られ、仕分け精度の向上及び品質の安定を図ることができる花卉選別方法及びその装置を提供する。
【解決手段】バケットコンベヤ2の各バケット3…に載置された各花卉A…を撮影カメラ16で撮影し、その撮影した画像から花卉Aの面積や長さを求め、画像処理装置により算出した花卉Aの面積や長さと、判定装置の等階級設定部に記憶された基準面積情報及び基準長さ情報と比較して等階級を判定する。判定装置22による判定に基づいて、各バケット3…に載置された各花卉A…を、第1〜第6の各仕分け部d…に対して等階級別に振り分け処理する。
(もっと読む)
概して平坦かつ軽量の物品のガス駆動される流れを選別するための方法及び装置
様々な寸法の概して平坦で軽量の物品のガス駆動される流れを選別するための方法及び装置は、好適な光学的な検査を行い、これにより不適格の物品を発見し、この不適格の物品を流れから除去する。特に、検査及び選別は物品の実質的に直線的な移動の間に行われる。除去は、直線的な移動に対して実質的に垂直な方向にガスを駆動することによって行われる。有利には、検査の前に、遠心力によって物品を向き付け、この遠心力は、前記物品を、垂直運動への移行部における傾斜した壁部に対して向き付ける。物品を狭い層に閉じ込めるために空気流手段(83,84)が使用されることもできる。 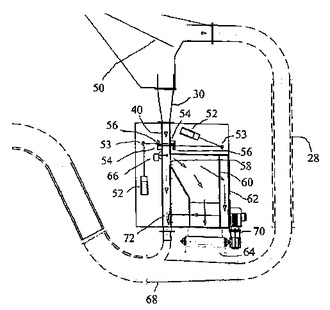 (もっと読む)
(もっと読む)
ばら状態で流れる生産物の品質評価方法
ばら状態の生産物の流れにおける該生産物の品質に関連したデータを、その監視ステーション通過中に発生する方法が開示されている。監視ステーションにおける生産物の少なくとも一部分の検査は、その流れが流れている間に間隔をおいて実施される。その検査は、一つ以上の色々な技術を使用して検査されるその部分における個々の生産物片を識別する。それら個々の生産物片は次いで選定基準に従って検査され、それら基準に合わないような個々の生産物片の量又は割合が確定される。そのような検査によって発生されるデータは、ばら状態の流れの品質表示を行うために分析される。  (もっと読む)
(もっと読む)
容器を仕分ける方法
【課題】本発明はマトリックスにしたがって束(8)状の構成で送給されるとともに、ある種類との関連性を吟味されて前記束(8)から取り出され、かつ種類によって分類されて再び束(8)に入れられる容器(9)の仕分け方法に関する。
【解決手段】本発明の目的は、前記の種類の方法において、過剰な財政支出を伴うことなく、単位時間毎にかなり多数の容器および/または束を自動的に仕分けることを可能にする方法を創出することにあり、これは束に含まれる全ての前記容器を該容器のそれぞれの種類(A、B、CまたはD)を判断するという観点において吟味する第1の段階と、種類(A、B、CまたはD)との関連性に関する前記容器(9)の前記第1の検査結果を用いて、第1のロボット(13)が、全ての前記種類の全ての前記容器(9)を前記束(8)から一緒に取り出すとともに、該容器をその固有の種類にしたがって別々のコンベヤ(4)上に置くような態様に制御される第2の段階とからなり、前記別々の各コンベヤは、特定の種類に割り当てられ、前記第2の段階の後に、前記容器(9)は、該容器が載せられたそれぞれの前記コンベヤによって集結台(15)に移送されて、前記集結台上において1つの種類(A、B、CまたはD)の十分な個数の容器(9)が完全なマトリックスを構成し終えるまで保管される方法において、第2のロボット(16)が、前記完全なマトリックスの全ての前記容器(9)を前記集結台(15)から取り除くとともに、該容器を所定の束(8)に入れることを特徴とする方法によって達成される。
(もっと読む)
1 - 15 / 15
[ Back to top ]