
Fターム[3F081BD07]の内容
コンベア上の物品の姿勢制御 (7,432) | 流れ形態の変換 (1,078) | 間隔(ピッチ)変更 (259)
Fターム[3F081BD07]の下位に属するFターム
前後方向の間隔を変更するもの (190)
幅、左右方向の間隔を変更するもの (41)
Fターム[3F081BD07]に分類される特許
21 - 28 / 28
ガラス瓶、ボトルなどを組分けする方法
本発明は、コンベア(1)上で列をなして到達する製品(2)を収集する方法に関し、前進方向に対して横方向に設けられた収集デバイス(4)を用いる。収集器(4)は、上記供給コンベア(1)の側方に配置された取込ステーション(10)に、収集した製品を配置しかつ切り離し、収集器(4)は、列の上流に向かう長手方向の運動と組み合わされる長手方向の運動、すなわち、製品供給コンベアの長手方向の運動とは反対方向の運動に分けられる。この方法を実行する装置は、コンベア(1)にかつコンベア(1)に沿って設けられたテーブル(3)と、上記コンベア(1)及び上記テーブル(3)の上方における長手方向及び横方向の運動に適した構造体によって搬送される収集器(4)と、を有している。テーブル(3)は、収集した製品をコンベア(1)の縁部においてコンベア(1)の両側に配置しかつ切り離す供給コンベア(1)の両側に延在する2つのパネル(31、32)を有している。 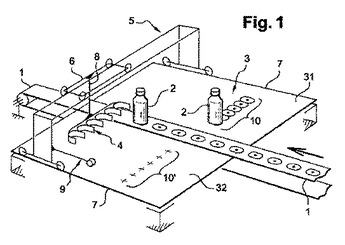 (もっと読む)
(もっと読む)
製品流れの調整方法とこのような方法を実施するためのレイアウト
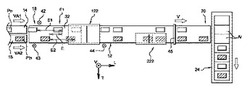
本発明は、2つのライン(F1、F2)の製品(Pn、P’n)の流れ(F)を調整することを目的とする調整方法に関し、この調整方法は、ライン(F1、F2)の一方に属する第1の製品(Pn、P’n)と、すぐ上流に位置し、ライン(F1、F2)の他方に属する第2の製品(Pn、P’n)との間隔(E)の値が、第1の設定値(PAS1)より小さいときに減速させる、第1のステップと、下流にある、第1のライン(F1)の製品(Pn)と、すぐ上流に位置する、近接する、第2のライン(F2)の製品(P’n)との間隔(E)の値が、第2の設定値(PAS2)より小さいときに減速させる、第2のステップと、を少なくとも備えることと、前記第1の減速ステップおよび第2の減速ステップは、キャビティ(Ai)へ移送する装置(24)に応じて決定されるシーケンス(PAS1、PAS2)に従って、第1および第2のライン(F1、F2)の製品(Pn、P’n)の間隔(E、E1、E2)の位相をそろえるために、それぞれ選択的に実施されることと、を特徴とする。 (もっと読む)
農畜産物の分配整列装置

【課題】 供給コンベアからの農畜産物の搬送量が第2コンベアの単位時間当たりの搬送能力Q2を遥かに超え、第1コンベア上の下流側で農畜産物が過剰に集積した場合でも、第2コンベア上の農畜産物を第3コンベアへ押し出すことを抑制する農畜産物の分配整列装置を提供する。
【解決手段】 第1コンベア、第2コンベア及び第3コンベアの単位時間当たりの搬送能力をQ1、Q2、Q3とし、処理装置の単位時間当たりの搬送処理能力をQ4とすると、搬送能力Q1及び搬送能力Q3は搬送能力Q2よりも高く、搬送能力Q2は搬送処理能力Q4と等しく、第2コンベアでは、コンベア本体が農畜産物の動きを制限する力が、第1コンベアのコンベア本体が農畜産物の動きを制限する力よりも高く設定された農畜産物の分配整列装置において、集積状態検出手段にて検出された第1コンベア上の下流側における農畜産物の集積状態に基づいて供給コンベアの駆動を制御する。
(もっと読む)
板状体整列設備
【課題】搬送経路の上流側から複数列で搬送されてきた板状体に対して、向きと位置との調整を同時動作によって行える板状体整列設備を提供する。
【解決手段】回転整列装置10は、複数列の板状体5,6を搬送可能なコンベア部11と、搬送経路9の方向に対して直交状の横方向に各別に正逆移動自在な複数の移動体31A,31B,31Cを有する。各移動体に、昇降自在でかつ縦軸心53の周りに旋回自在な板状体支持部55を設けた。板状体支持部は昇降によって、コンベア部の搬送面11aに対して出退動自在に構成した。板状体支持部を搬送面に対して突出させて板状体を持ち上げ支持した状態で、板状体群の旋回動と横方向動とを同時状に行うことで、向きと位置との調整を同時動作により行える。搬送経路終端における板状体の個々の搬送を高速化(高能力化)するときでも、回転整列装置での動作を速くすることなく対処でき、振動(衝撃)が生じることなく、板状体群に対する向きと位置との調整を行える。
(もっと読む)
鶏卵整列供給装置
【課題】鶏卵が受ける圧力を極力抑制し、鶏卵の破壊を防ぎ、過不足無く高速で自動鶏卵処理システムに供給する。
【解決手段】原卵コンベヤから受け取った鶏卵を自動鶏卵処理システムへ移し替える鶏卵整列供給装置において、鶏卵を複数列に区分けする手段を有し、鶏卵を搬送する無端コンベヤと無端コンベヤの表面に近接させて一定の間隔で取り付けた、狭い薄平板の送卵促進板が無端のコンベヤの表面を移動できる様に構成し、送卵促進板は無端コンベヤと異なる速度で移動でき、鶏卵整列供給装置の鶏卵受け取り量過多による鶏卵の積み重なり状態に即して移動速度を増減、停止させる。
(もっと読む)
アキュームレーションコンベヤ装置
【課題】容器を先入れ、先出しすることができる小型のアキュームレーションコンベヤ装置を提供する。
【解決手段】容器Aを搬送する入口コンベヤ1に、一対のサイドガイド4を設けた幅広のアキュームレーションコンベヤCを接続し、その搬出端部に出口コンベヤ3を接続する。アキュームレーションコンベヤCを容器搬送方向に複数に分割し、その格分割コンベヤに容器の滞留を検出する入口センサおよび出口センサを設ける。処理装置の故障により、出口コンベヤ3上に容器Aが滞留し、出口コンベヤ3の供給端部上において停止する容器Aに後続の容器Aを当接させて容器Aを順次停止させ、最下流の分割コンベヤの搬出端部から順に容器Aを貯留させると共に、出口センサが貯留容器Aを検出した際に、その分割コンベヤを低速運転に切換え、入口センサが貯留容器Aを検出した際にその分割コンベヤを停止させて、最下流の分割コンベヤから順に容器Aを貯留させる。
(もっと読む)
コンベア設備
【課題】傾斜搬送経路での被搬送物の滑走搬送を、被搬送物の形状や重量などに関係なく、常に所定の速度またはそれ以下の速度で確実に行え、高速で搬入された被搬送物は所定の速度に減速し得るコンベア設備を提供する。
【解決手段】コンベアフレーム23に複数のローラ25を遊転自在に配設した傾斜ローラコンベア21を有するコンベア設備10である。複数のローラの下方に駆動ベルト40を配設し、駆動ベルトが下方から当接される回転体41をコンベアフレーム側に遊転自在に設けた。回転体に、ワンウェイクラッチ47を介して輪体48を設け、輪体は少なくとも1個のローラに下方から当接させた。ワンウェイクラッチは、駆動ベルトにより回転される回転体に対して輪体が高速回転することを阻止するように構成した。
(もっと読む)
分散形物品操作を行うコンベヤシステム
物品(38)を操作するためのシステム(20,22)及び方法は、少なくとも1つの運搬面を有するベッド(30)を提供することを含む、運搬面は、物品(38)を運搬方向にベッドの上流端部から下流端部へ移動させる。少なくとも1つのセンサ(36,34a,34b,34c)は、ベッド(30)上のあらゆる物品(38)の位置を決定するために設けられている。選択された物品は、まだ操作されていないベッド上を移動する物品よりも概して高い速度で運搬方向に移動させられ、物品は選択的に回転させられる。 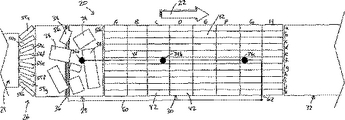 (もっと読む)
(もっと読む)
21 - 28 / 28
[ Back to top ]