
Fターム[3F115CB07]の内容
パッケージ・線条体の安全装置 (910) | 検出対象(入力) (202) | 糸走行状態検知 (95) | 走行長 (16)
Fターム[3F115CB07]に分類される特許
1 - 16 / 16
綾巻きパッケージ交換装置を運転する方法ならびに綾巻きパッケージ交換装置
【課題】綾巻きパッケージ交換装置を運転する方法であって、綾巻きパッケージ交換装置は、自動で、綾巻きパッケージを製造する繊維機械の作業部に対して機能し、作業部に対して機能するために様々な操作装置、特に旋回可能で移動可能に支承された、ヤーンリザーブを形成するためのヤーン処理エレメントを備えているものを改良して、綾巻きパッケージを製造する繊維機械の作業部の設置位置のずれを問題なく迅速かつ精確に求めるものを提供する。
【解決手段】綾巻きパッケージ交換装置23を、少なくとも綾巻きパッケージを製造する繊維機械1の最初の運転前に、繊維機械1の作業部2に順次位置決めし、測定装置によって、作業部2の設置位置を測定し、求めた値を、作業部2においてヤーン処理エレメント20をあとで精確に位置決めするために準備する。
(もっと読む)
糸センサ、及び、この糸センサを備えた繊維機械

【課題】固有の検出特性のバラツキの影響を補正によって除去するとともに、交換の度にその補正情報を設定することが不要な、糸センサを提供すること。
【解決手段】糸センサ24は、走行する糸Yの走行速度に対応した検出信号を発信する検出部40と、検出部40に固有の補正情報を記憶する記憶部41と、検出部40から発信された検出信号を、記憶部41に記憶された補正情報を用いて補正する演算部42と、演算部42で補正された後の補正済み信号を出力する信号出力部43とを備えている。
(もっと読む)
柄経糸用部分整経機の回転式クリールと、柄経糸用部分整経機、およびボビン直径を測定するための方法
【課題】 測定精度を高めた柄経糸用部分整経機の回転式クリール、柄経糸用部分整経機、およびボビン直径を測定するための方法を提供することを目的とする。
【解決手段】 柄経糸用部分整経機(1)の回転式クリールは、回転軸の周りを回転可能に支承された支持体(9、10)を有し、この支持体上に複数のボビン装着部(11)が配置されており、ボビン装着部(11)内に配置されるボビン(12、13)の充填度を検出することのできるセンサ装置(18)が設けられている。本発明はさらに、このような回転式クリールを有する柄経糸用部分整経機、そして充填度を検出するための方法に関する。
(もっと読む)
糸巻取装置及びパッケージの回転不良検出のためのアラーム閾値決定方法
【課題】パッケージの回転不良を高精度に自動検出できる糸巻取装置を提供する。
【解決手段】自動ワインダは、巻取ユニット16と、機台制御装置11と、を備える。巻取ユニット16は、糸の巻取作業を行う。機台制御装置11は、巻取ユニット16の制御を行う。機台制御装置11は、理論パッケージ算出部27と、演算部17と、を備える。理論パッケージ算出部27は、理論パッケージ回転数を算出する。演算部17は、パッケージの回転不良を判定するためのアラーム閾値を理論パッケージ回転数に基づいて決定する。アラーム閾値は、巻取ユニット16に入力される。巻取ユニット16が備えるアラーム判定部76は、パッケージの実際の回転数と、アラーム閾値と、を比較してアラーム判定を行う。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、目飛びなどの糸条の走行異常の検出用閾値を作業者の負担なく設定できる糸条の走行監視装置を提供することにある。
【解決手段】糸条の走行異常を判断する判断手段が、閾値検索をおこなう期間を設定する閾値検索時間設定部と、設定された閾値検索時間内に検出した糸条の一定送り量ごとのパルス数を閾値設定用パルス数として記憶する閾値設定パルス数記憶手段と、前記閾値設定用パルス数に基づいて走行異常を判断する閾値を設定する閾値設定手段と、を含む糸条の走行監視装置。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、目飛びなどの糸条の走行異常の発生を非接触で確実に検知することができる装置を提供することにある。
【解決手段】本発明の走行監視装置10は、繊維機械12で使用される針糸14aと下糸14bの両方の走行を監視する。各糸条14a,14bに対してセンサー16a,16bが設けられる。センサー16a,16bには、光源18a、18bと差動型空間フィルタ素子20a,20bが含まれる。第1センサー16aの差動出力と第2センサー16bの差動出力は、糸条14a,14bの走行の有無を判定するための信号処理回路26に入力され、処理される。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】パッケージに巻き取られる糸長さを精密に測定することができる糸巻取装置を提供する。
【解決手段】自動ワインダの巻取ユニット10は、パッケージ30に所定長さの糸を巻き取るように構成される。この巻取ユニット10は、糸プール部71と、サーボモータ55と、糸長制御部90と、を備える。糸プール部71は、パッケージ30に巻き取られる前の糸を貯留する。サーボモータ55は、糸プール部71に糸を供給するために駆動される。糸長制御部90は、パッケージ30に所定長さの糸が巻き取られるように、サーボモータ55の正転パルス信号を供給カウント部91によってカウントする。そして、正転パルス信号のカウント値から、パッケージ30に巻き取られた糸長さが算出される。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】糸欠陥検出器を通過する糸送り量を正確に算出して糸欠陥の検出精度を向上させることができる糸巻取装置を提供する。
【解決手段】巻取ユニット10は、パッケージ30に巻き取られる前の糸20を貯留するための糸プール部71と、糸プール部71に糸20を供給するために駆動されるサーボモータ55と、を備える。また、巻取ユニット10は、糸欠陥を検出するために糸プール部71の上流側に配置されるクリアラ15を備える。そして、巻取ユニット10は、糸プール部71より上流側の糸送り量に基づいて、クリアラ15を通過した太さムラの長さを計算する。
(もっと読む)
高圧洗浄車および高圧洗浄装置のホース自動巻き取り装置、並びにホース自動巻き取り方法
【課題】熟練者が前方のマンホールで監視することなく、ホースを被洗浄管内の所定位置まで自動的に前進させて洗浄可能とする。
【解決手段】被洗浄管内に挿入されたホースの先端から高圧水を噴出することにより被洗浄管内を洗浄する高圧洗浄車であって、ホースが巻き付けられ、回転自在に支持されたホースリールと、ホースリールをホースの巻き取り方向に回転駆動させるホースリール回転装置と、ホースの繰り出し長さを設定するホース長設定手段91と、ホースの繰り出し長さを検出するホース長検出手段93と、ホース長検出手段93により検出したホースの繰り出し長さがホース長設定手段91により設定されたホースの繰り出し長さに到達した場合に、ホースリールの回転を停止するホース回転制御手段95とを備える。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、合繊糸などの糸条であっても、非接触で正確にその走行が監視できる装置を提供することにある。
【解決手段】糸条の走行監視装置10は、糸条12に照射する光Lを発光する光源14と、光Lを糸条12に垂直に照射し、糸条12からの反射光を光源14とは異なる方向に導く導光手段16と、糸条12からの反射光を撮像素子18で受光し、撮像素子18の出力の単位時間ごとの相対変化から糸条12の動きを検出する手段20と、を含む。
(もっと読む)
電線加工機における電線測長装置
【課題】 測長精度の向上が図れると共に構造の簡素化も図った電線加工機における電線測長装置を提供する。
【解決手段】 電線10を電線送給方向Pに沿って順次送給する加工電線給排機構と、電線長を測長する測長機構12を備える。加工電線給排機構は、電線10を両側より解除自在に挟持する対の電線送給部を備える。測長機構12は、加工電線給排機構の電線送給方向P上流側に配置され、電線10の一側に転動自在に当接される測長ローラ58と、電線10の他側に摺動自在に当接されると共に一定角度だけ回動自在に支持された従動ローラ体59とを備え、測長ローラ58に測長用エンコーダが連結され、従動ローラ体59を電線送給方向Pと反対方向に回動付勢する引張バネ74を備える。
(もっと読む)
糸巻取装置の糸長測定装置
【課題】糸巻取用の巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、このモータ41とは切り離されて駆動し、前記糸巻取の際に糸を綾振るためのトラバース装置5とを備えた糸巻取装置において、糸巻取長さを精度良く測定できる糸長測定装置を提供する。
【解決手段】巻取チューブ6に糸4を巻き取って形成した糸層の周面の周方向の糸層周面移動距離ΔPLsを検出する手段73と、糸層の幅方向の糸のトラバース移動距離ΔTLsを検出する手段74と、糸層周面移動距離演算手段73で検出されたΔPLsとトラバース移動距離演算手段74で検出されたΔTLsをそれぞれ入力し、入力されたΔTLs及びΔPLsから、所定時間Tsごとに巻取ボビン6,7に巻き取った糸4の巻取長さを計算し、所定時間Tsごとに計算された巻取長さΔYLを巻始めから積算して、巻取ボビン6,7に巻き取った糸4の巻取長さYLを求める、巻取長さ演算手段75と、を備える。
(もっと読む)
小割システム及び小割方法
【課題】 給糸パッケージ3の糸を引き出して巻取装置6で複数のボビン8に所定長ごとに分割して巻き取る小割システム1において、給糸パッケージ3の解舒初期・終期を問わず、均質な品質の小割パッケージ9を形成できるようにする。
【解決手段】 給糸パッケージ3から解舒された糸Yを前記巻取装置6で巻き取られる前に測長及び貯溜する測長貯溜装置5を備える。また、この測長貯溜装置5から下流側へ送られる糸の張力を調整するテンサ7を備える。
(もっと読む)
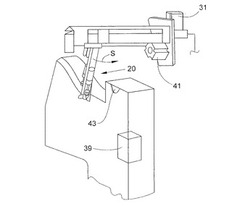
測長機を備えた巻束体巻き出しドラム装置
【課題】電線などの巻束体を巻き出し自在に収納支持する巻束体巻き出しドラム装置に対して、巻き出される線材の巻き出し量を測長する測長機を組み合わせて、線材の安定繰り出し並びに正確な測長をスムースに行い得るようにした装置を提供すること。
【解決手段】電線などの線材Cを束ねた巻束体Hを、接線方向に巻き出し自在に支持する巻束体巻き出しドラム装置1と、巻束体巻き出しドラム装置に対して取付け連結手段7を介して組み合わされる測長機8とを含むものからなり、測長機が、一対の接圧ローラによって構成される測長部を備え、該接圧ローラ間に線材を挿通把持した状態で、接圧ローラ間で線材を移動させて、当該線材の繰り出し量を測長し、取付け連結手段が、測長機を巻束体の外周囲側において移動並びに固定可能であり、一対のローラの各軸芯を含む面Sを自在に回転可能になした測長機を備えた巻束体巻き出しドラム装置。
(もっと読む)
糸測長貯留装置
【課題】 糸種に拘らずに、安全にまた糸を正しく測長して、貯留可能であると共に、糸を引き出す際に、どんな糸種であっても、糸を損傷することなく確実に送り出すことができる糸測長貯留装置を提供することである。
【解決手段】 糸進行方向に回動する少なくとも一対の無端ベルト20と、該無端ベルトの周囲を回動する糸案内ガイド10とを有する糸貯留部2とし、該糸貯留部2に所定長さの糸を巻回貯留しながら、前記無端ベルトを同時に前進させて、前記糸を前方に送り出す構成の糸測長貯留装置1とした。
(もっと読む)
線状の用具の巻き取りを制御するシステムおよび方法
本発明の好ましい実施形態は、給水ホースなどの線状の用具を繰り出すときに使用者を補助し得る自動リールを含む。自動リールは、制御システム(200)を含み、制御システム(200)は、モータ制御装置(224)を有し、このモータ制御装置(224)は、線状の用具が引っ張られたこと、または線状の用具の張力が増加したことを検出し、線状の用具を繰り出すようにモータ(222)を回転させ得る。いくつかの実施形態では、モータ制御装置(224)は、線状の用具の繰り出された部分の長さを追跡しかつ/または線状の用具の終端部分を後退させるときモータ(222)の巻き取り速度を減速する。  (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]