
Fターム[3F204BA09]の内容
クレーンの細部(制御、安全) (2,955) | 荷物係合要素の種類 (205) | 荷物係合要素 (205) | グラブバケット (17)
Fターム[3F204BA09]の下位に属するFターム
複索式 (2)
Fターム[3F204BA09]に分類される特許
1 - 15 / 15
クレーン及びその制御方法
【課題】
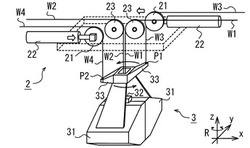
荷役具(例えば、クラブバケット)を有するクレーンにおいて、荷役具を任意の角度に旋回することのできるクレーン及びその制御方法を提供する。
【解決手段】
トロリ2が、2本の懸吊ワイヤロープW3、W4を支持する2つの可動シーブ21と、可動シーブ21に設置した移動装置22を有しており、海側懸吊ドラムD3及び陸側懸吊ドラムD4で、2本の懸吊ワイヤロープW3、W4を同一速度で巻き取る又は送り出す荷役具昇降制御と、2本の懸吊ワイヤロープW3、W4の一方を巻き取り、他方を送り出すトロリ横行制御と、可動シーブ21を移動装置22によりトロリ2の横行方向xに移動させ、可動シーブ21の移動に伴い荷役具3が鉛直方向zを軸として旋回Rする荷役具旋回制御のうち、少なくとも2つの制御を同時に、又はいずれか1つの制御を単独で行う。
(もっと読む)
グラブバケット式アンローダのバラ物陸揚げ方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
ロープトロリ式アンローダのバケット振れ止め装置
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、張力検出手段からの第1巻上ロープ19及び第2巻上ロープの張力検出値とトロリの横行速度検出手段からのトロリ横行速度とグラブバケットの吊り長さ検出手段からの吊り長さとを入力し、トロリの横行起動時には横行方向前側の巻上ロープの張力が横行方向後側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御し、トロリの横行停止時には横行方向後側の巻上ロープの張力が横行方向前側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御してグラブバケットをトロリの直下に位置させる制御器を備える。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
単索式グラブバケット用油圧制御シリンダー装置
【課題】単索式グラブバケット用油圧制御シリンダー装置の小型、軽量化を図るとともに、油圧シリンダーを含む油圧制御機構の信頼性を高める。
【解決手段】油圧制御シリンダーの下端部側面にオイルタンクと、油圧制御機構の油圧回路を構成するマニホールドブロックとをシリンダー本体の下端部側面に固定し、前記オイルタンクとシリンダー本体の下端閉鎖ブロックに開けたシリンダー下部側連通路とを連通させ、マニホールドブロックの主流路の入口側を上端閉鎖ブロックのシリンダー上部側連通路に連通させるとともに、該マニホールドブロックの主流路の出口側を前記シリンダー本体の上端閉鎖ブロックのシリンダー上部側連通路に連通させる。
(もっと読む)
クレーン機能付きの油圧ショベル
【課題】クレーン機能付きの油圧ショベルにおいて、走行とブーム上昇とを連動させる場合に、吊り荷重が大きいと、高負荷側のブーム上昇速度が大きく低下してしまうことを回避する。
【解決手段】クレーン作業時に、各種油圧アクチュエータノ油圧供給源になる第一、第二メインポンプ13、14の吐出流量を制限する一方、クレーン作業時であっても走行とブーム上昇とを連動させる場合には、第一、第二メインポンプ13、14の吐出流量を、吊り荷の荷重に応じて増加させるように構成した。
(もっと読む)
浚渫作業システム及び水底土砂の水平掘削方法
【課題】 既存の浚渫作業船に対しても簡単な構成で水平掘削を可能にする。
【解決手段】 グラブバケット装置Bの昇降をコントロール操作する操作手段C1と、操作員が視認可能なモニター装置Mと、モニター装置Mの作動を制御する制御装置Uと、グラブバケット装置Bの深度測定手段Dsとが浚渫作業船に設けられ、制御装置Uは、グラブバケット装置Bの閉じ動作開始からの経過時間を横軸とし且つ深度を縦軸とした操作指示面m0と、操作指示面m0上でグラブバケット装置Bの閉じ速度と浚渫時の設定深度Loとバケット先端の円弧状移動軌跡rとに基づき設定されるグラブバケット装置Bの制御目標深度に対応する第1の指標m1と、操作指示面m0上でグラブバケット装置Bの閉じ動作中の測定深度に対応していてグラブバケット装置Bの閉じ動作時にその経過時間に応じて操作指示面m0上を移動する可動点よりなる第2の指標m2とをモニター装置Mに表示させる。
(もっと読む)
荷重負荷機械
【課題】本発明は、機体バランスを高精度に算出して即応性の高い転倒回避を行うことができる荷重負荷機械を提供することにある。
【解決手段】本発明は、地面に接地する地面接地部2と、この地面接地部2に連結された荷重負荷部3とを備えた荷重負荷機械(1)において、前記地面接地部2と荷重負荷部3の連結部(4,8)に複数の力学量検知センサ(11A〜11D)を設けると共に、これら力学量検知センサからの検出信号に基づいて機体バランスを演算して転倒の危険性を判断する演算装置15と、この演算装置からの指令により転倒回避指令を出力する転倒回避指令出力手段16を設けたのである。
このように構成することで、各力学量検知センサからの検出信号を比較するだけで作業中の機体バランスをリアルタイムで得ることができ、また、その結果を転倒回避指令出力手段16で出力するので、オペレータは荷重負荷機械の転倒回避を即行うことができる。
(もっと読む)
低含水系材料の切出方法
【課題】クラブバケットクレーンを用いて低含水系材料を切り出す方法において、その切出量が所望量となるようにすることができ、低含水系材料の定量供給を可能とする方法を提供すること。
【解決手段】秤量器3を備えるクラブバケットクレーンAを用いて含水量が50質量%以下の低含水系材料を切り出す低含水系材料の切出方法において、クラブバケット1が低含水系材料の表面に着床してからの時間または秤量器3による秤量値の減少量とクラブバケット1による低含水系材料の切出量との関係を予め求め、この関係に基づいて、所望量の低含水系材料を切り出す。
(もっと読む)
グラブバケット式浚渫船とこれを用いた浚渫方法
【課題】グラブバケットにより薄層浚渫を確実に行うことができるグラブバケット式浚渫船とこれを用いた浚渫方法を提供する。
【解決手段】ブーム7,アーム8及びこのアーム8に連結したグラブバケット3を備えたバックフォーを浚渫船1に搭載する。グラブバケット3のバケット本体21の刃先22の位置を検出する刃先位置検出手段と、アーム8とグラブバケット3を連結し、該アーム8に対してグラブバケット3を昇降するバケット昇降手段40と、このバケット昇降手段40を制御するグラブバケット開閉制御手段とを備える。刃先位置検出手段により刃先22の位置を確認して水底面に対し刃先22を合わせ、バケット本体21を閉めながら、グラブバケット開閉制御手段の制御により水底面を薄層浚渫するように、グラブバケット3を昇降して浚渫を行うことができる。また、刃先位置検出手段は、浚渫船1に設けたGPS装置の位置情報を用いるから、刃先位置を正確に設定できる。
(もっと読む)
作業機械
【課題】 作業腕先端に取り付けられた作業具の対地角を一定に維持できる作業機械を提供する。
【解決手段】 機能スイッチ83がオンされると、専用コントローラ80からの制御信号が本体コントローラ60へ入力されるように専用コントローラ80はリレー84の接点を切り換える。専用コントローラ80は、フロント作業腕101の姿勢変化によるグラップルバケット14の対地角変化を打ち消すように、制御信号を演算して本体コントローラ60へ出力する。そして、本体コントローラ60が比例電磁式減圧弁51a,51bの設定圧力を制御する。機能スイッチ83がオフされると、専用コントローラ80は、作業具レバー装置70からの操作信号が本体コントローラ60へ入力されるようにリレー84の接点を切り換える。操作レバー71の操作量に基づいて本体コントローラ60が比例電磁式減圧弁51a,51bの設定圧力を制御する。
(もっと読む)
グラブバケットの油圧制御回路
【課題】 簡単な構造で作動油の発熱や昇温などを確実に抑制して連続作業を可能にするグラブバケットの油圧制御回路を提供する。
【解決手段】 バケット開閉用の油圧シリンダ15を駆動する油圧ポンプ19の吐出管5に連結され、圧油を油圧シリンダ15のヘッド側室15aとロッド側室15bに切換供給し、油圧ポンプ19がデッドヘッド圧に達したときに、油圧ポンプ5の吐出圧力が設定圧力まで昇圧したことを検出する圧力スイッチ16から出力された信号を受けて計時を開始するタイマ20から出力された信号を受けて、第1の方向切換弁11Aとともに、自動的に中立状態に切り換わる第2の方向切換弁11Cとを中立状態に切り換えることにより、油圧ポンプ19の吐出油を最小吐出圧かつ最少吐出量で循環させる。
(もっと読む)
バラ物荷役車両
【課題】荷役位置の変更を容易に行えて、埠頭のような固定設備の設置に規制がある場所においても容易に採用できるバラ物荷役車両を提供する。
【解決手段】下部に走行車輪装置20,27を設けた車体10は門型枠状に形成されている。車体10の上部に、吐き出し口33を下向きとしてホッパー装置30を設け、車体10の上部にクレーン装置50を設けた。クレーン装置50は、昇降自在なグラブバケット58を有するとともに、グラブバケット58を車体10の側外方とホッパー装置30の上方との間で移動自在に構成した。車体10内で吐き出し口33の下方に運搬用車両1を対向自在に構成した。クレーン装置を装備したバラ物荷役車両の移動は簡単かつ安定して行うことができて、荷役位置の変更を容易に行うことができ、運搬用車両への積み付けを簡単かつ容易に行うことができ、埠頭のような固定設備の設置に規制がある場所においても容易に採用できる。
(もっと読む)
ごみ処理工場用自動クレーン
【課題】早期に火災の発生場所を立体的に特定することにより、正確に早期消火を行って延焼を防止し、火災によるクレーンやごみ処理工場の操業停止を未然に防ぐことができるごみ処理工場用自動クレーンを提供すること。
【解決手段】クレーンガーダ1のごみピットPが撮影できる位置に所定の間隔を隔てて配設した2台のカメラ2a、2bと、これら2台のカメラ2a、2bのステレオ視による視差を利用してごみピットP内に堆積したごみ高さを計測するごみ高さ計測手段と、計測されたごみ高さの情報をごみ高さマップとして記憶するごみ高さ記憶手段と、ステレオ視を行う2台のカメラ2a、2bの近傍に設置した赤外線カメラ3と、この赤外線カメラ3で撮影した赤外線画像からごみ温度データを計測するごみ温度データ計測手段と、計測されたごみ温度データをごみ高さマップに重ねて、ピットP内ごみの温度分布が色調として表示されるごみ温度マップとして記憶するごみ温度記憶手段とを備え、ごみ温度マップに基づいてピットP内の火災の番地特定を行う。
(もっと読む)
ごみ処理工場用自動クレーンの制御装置
【課題】クレーンの運転中にグラブバケットがごみ搬入扉前のごみピット内に堆積したごみに衝突する等の事故発生を防止すると共に、クレーンの稼働効率を向上することができるごみ処理工場用自動クレーンの制御装置を提供すること。
【解決手段】クレーン1のクレーンガーダ11のごみピットPが撮影できる位置に所定の間隔Dを隔てて配設した2台のカメラ2a、2bと、この2台のカメラ2a、2bのステレオ視による視差を利用してごみピットP内に堆積したごみ高さを計測するごみ高さ計測手段と、ごみ高さ計測手段により計測されたごみ高さの情報をごみ高さマップとして記憶するごみ高さ記憶手段とを備え、クレーン1の次作業のごみ掴み番地がごみ搬入扉Dr前で、かつ、そのごみ搬入扉Drが閉であれば、ごみ掴み番地のごみ高さの情報を取出すとともに、ごみの搬入を禁止するインターロック信号をごみ搬入扉制御装置に出力してそのごみ搬入扉を開禁止にする。
(もっと読む)
1 - 15 / 15
[ Back to top ]