
Fターム[3F204DA04]の内容
クレーンの細部(制御、安全) (2,955) | 被搬送物と荷役場所 (198) | 被搬送物 (107) | ばら物;粉粒体 (15)
Fターム[3F204DA04]に分類される特許
1 - 15 / 15
ロープトロリ式アンローダのバケット振れ止め装置
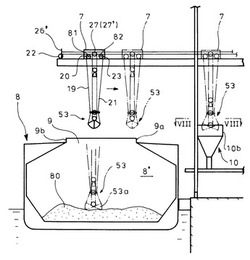
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、張力検出手段からの第1巻上ロープ19及び第2巻上ロープの張力検出値とトロリの横行速度検出手段からのトロリ横行速度とグラブバケットの吊り長さ検出手段からの吊り長さとを入力し、トロリの横行起動時には横行方向前側の巻上ロープの張力が横行方向後側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御し、トロリの横行停止時には横行方向後側の巻上ロープの張力が横行方向前側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御してグラブバケットをトロリの直下に位置させる制御器を備える。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
ショベルクレーン
【課題】クレーン仕様の場合、吊り荷重が重くなるほど旋回速度を遅くなるようにした、また旋回アクチュエータの単独操作あるいは他のアクチュエータとの連動操作においても吊り荷重が重くなるほど旋回速度が遅くなるようにしたショベルクレーンを提供する。
【解決手段】クレーン仕様のときには油圧ポンプの吐出流量および投入馬力を、作業アームの吊り荷重が重くなるほど小さくなるように制御する、制御装置を備える。また、制御装置は、旋回アクチュエータの単独操作のときには他のアクチュエータとの連動操作のときよりも、油圧ポンプの吐出流量および投入馬力の閾値を小さく設定する。
(もっと読む)
単索式グラブバケット用油圧制御シリンダー装置
【課題】単索式グラブバケット用油圧制御シリンダー装置の小型、軽量化を図るとともに、油圧シリンダーを含む油圧制御機構の信頼性を高める。
【解決手段】油圧制御シリンダーの下端部側面にオイルタンクと、油圧制御機構の油圧回路を構成するマニホールドブロックとをシリンダー本体の下端部側面に固定し、前記オイルタンクとシリンダー本体の下端閉鎖ブロックに開けたシリンダー下部側連通路とを連通させ、マニホールドブロックの主流路の入口側を上端閉鎖ブロックのシリンダー上部側連通路に連通させるとともに、該マニホールドブロックの主流路の出口側を前記シリンダー本体の上端閉鎖ブロックのシリンダー上部側連通路に連通させる。
(もっと読む)
荷重負荷機械
【課題】本発明は、機体バランスを高精度に算出して即応性の高い転倒回避を行うことができる荷重負荷機械を提供することにある。
【解決手段】本発明は、地面に接地する地面接地部2と、この地面接地部2に連結された荷重負荷部3とを備えた荷重負荷機械(1)において、前記地面接地部2と荷重負荷部3の連結部(4,8)に複数の力学量検知センサ(11A〜11D)を設けると共に、これら力学量検知センサからの検出信号に基づいて機体バランスを演算して転倒の危険性を判断する演算装置15と、この演算装置からの指令により転倒回避指令を出力する転倒回避指令出力手段16を設けたのである。
このように構成することで、各力学量検知センサからの検出信号を比較するだけで作業中の機体バランスをリアルタイムで得ることができ、また、その結果を転倒回避指令出力手段16で出力するので、オペレータは荷重負荷機械の転倒回避を即行うことができる。
(もっと読む)
クレーンの振れ止め制御方法および振れ止め制御システム
【課題】半径方向の振れも考慮され、旋回終了地点における吊荷の振れの抑制効果に優れたクレーンの振れ止め制御方法および振れ止め制御システムを提供する。
【解決手段】ジブを旋回半径一定として加速区間、等速区間、減速区間の順で旋回させ、加速区間および減速区間の運転時間を、互いに同一の時間であって、吊荷の振子運動の周期Toの略整数倍に設定するとともに、加速区間の終了時点から、遠心力により生じる吊荷の半径方向の振動で最初の最大振れ変位になるまでの時間差を「(Δ/2)・To」として、等速区間の運転時間を「(n+Δ)・To」(n:0以上の整数)に設定する。
(もっと読む)
建設機械のアーム駆動用制御装置
【課題】
ショベルカーのアームの旋回制御において、小型で強力な電動機が出現したことで、電動機駆動が実用され始めたが、操作レバーによる左右旋回制御では、加速、減速状態時とも応答速度は同じであるため、作業性が悪く、同時に安全性にも問題があった。
【解決手段】
旋回速度の加速時と減速時の応答速度を個別に設定できるように、操作レバーによる速度指令信号から加速状態か減速状態かを判断し、インバータへの速度指令の前段に設けられたフィルタの時定数を、加速状態時には加速状態時用の時定数を、減速状態時には減速状態時用時定数を選択して設定することで、加減速時の応答速度を各別に設定できるようにした。加速減速状態の判断では、レバーの機械的振動によるノイズを除去し、さらに、急な加減速でもスムーズな切替えを実現し、作業性、安全性の向上を実現した。
(もっと読む)
低含水系材料の切出方法
【課題】クラブバケットクレーンを用いて低含水系材料を切り出す方法において、その切出量が所望量となるようにすることができ、低含水系材料の定量供給を可能とする方法を提供すること。
【解決手段】秤量器3を備えるクラブバケットクレーンAを用いて含水量が50質量%以下の低含水系材料を切り出す低含水系材料の切出方法において、クラブバケット1が低含水系材料の表面に着床してからの時間または秤量器3による秤量値の減少量とクラブバケット1による低含水系材料の切出量との関係を予め求め、この関係に基づいて、所望量の低含水系材料を切り出す。
(もっと読む)
グラブバケット式浚渫船とこれを用いた浚渫方法
【課題】グラブバケットにより薄層浚渫を確実に行うことができるグラブバケット式浚渫船とこれを用いた浚渫方法を提供する。
【解決手段】ブーム7,アーム8及びこのアーム8に連結したグラブバケット3を備えたバックフォーを浚渫船1に搭載する。グラブバケット3のバケット本体21の刃先22の位置を検出する刃先位置検出手段と、アーム8とグラブバケット3を連結し、該アーム8に対してグラブバケット3を昇降するバケット昇降手段40と、このバケット昇降手段40を制御するグラブバケット開閉制御手段とを備える。刃先位置検出手段により刃先22の位置を確認して水底面に対し刃先22を合わせ、バケット本体21を閉めながら、グラブバケット開閉制御手段の制御により水底面を薄層浚渫するように、グラブバケット3を昇降して浚渫を行うことができる。また、刃先位置検出手段は、浚渫船1に設けたGPS装置の位置情報を用いるから、刃先位置を正確に設定できる。
(もっと読む)
高所作業機および作業機用ハンドレール
【課題】作業用フロントとハンドレールの干渉を防止する。
【解決手段】高さ方向に立設されたポスト2の上部に設置され、起伏可能に作業用フロント4を支持する旋回体3と、旋回体3の底面に面して形成され、作業員が歩行可能な中間デッキ10と、中間デッキ10に立設され、中間デッキ10上での作業員の移動範囲を規制するハンドレール20と、作業用フロント4とハンドレール20とが干渉しないようにハンドレール20の高さを変更する高さ変更手段23,24とを備える。
(もっと読む)
作業機械
【課題】 作業腕先端に取り付けられた作業具の対地角を一定に維持できる作業機械を提供する。
【解決手段】 機能スイッチ83がオンされると、専用コントローラ80からの制御信号が本体コントローラ60へ入力されるように専用コントローラ80はリレー84の接点を切り換える。専用コントローラ80は、フロント作業腕101の姿勢変化によるグラップルバケット14の対地角変化を打ち消すように、制御信号を演算して本体コントローラ60へ出力する。そして、本体コントローラ60が比例電磁式減圧弁51a,51bの設定圧力を制御する。機能スイッチ83がオフされると、専用コントローラ80は、作業具レバー装置70からの操作信号が本体コントローラ60へ入力されるようにリレー84の接点を切り換える。操作レバー71の操作量に基づいて本体コントローラ60が比例電磁式減圧弁51a,51bの設定圧力を制御する。
(もっと読む)
グラブバケットの油圧制御回路
【課題】 簡単な構造で作動油の発熱や昇温などを確実に抑制して連続作業を可能にするグラブバケットの油圧制御回路を提供する。
【解決手段】 バケット開閉用の油圧シリンダ15を駆動する油圧ポンプ19の吐出管5に連結され、圧油を油圧シリンダ15のヘッド側室15aとロッド側室15bに切換供給し、油圧ポンプ19がデッドヘッド圧に達したときに、油圧ポンプ5の吐出圧力が設定圧力まで昇圧したことを検出する圧力スイッチ16から出力された信号を受けて計時を開始するタイマ20から出力された信号を受けて、第1の方向切換弁11Aとともに、自動的に中立状態に切り換わる第2の方向切換弁11Cとを中立状態に切り換えることにより、油圧ポンプ19の吐出油を最小吐出圧かつ最少吐出量で循環させる。
(もっと読む)
クレーンの故障診断装置
【課題】クレーンの制御装置が故障した場合でも、この故障したクレーンを運転して退避させ、代わりのクレーンをごみピット全体で運転することにより、クレーン設備を備えた施設を安定した状態で稼働を継続させることができるクレーンの故障診断装置を提供すること。
【解決手段】No1クレーンとNo2クレーンの両方において、巻上インバータ9a、9bと巻上ブレーキ回路10a、10bとにそれぞれ補助接点付ブレーカ1を設けるとともに、非常巻上運転用スナップスイッチ2と、動力切替用マグネットスイッチ3とを設け、正常な側の巻上インバータ9bを使用して、故障したNo1クレーンの巻上運転を一時的に可能にする。
(もっと読む)
ごみ処理工場用自動クレーンの制御装置
【課題】クレーンの運転中にグラブバケットがごみピット内に堆積したごみに衝突しないようにするために、必要以上にグラブバケットを巻き上げることなくクレーンの横行及び走行を行うことを可能にすることによって、クレーンの稼働効率を向上することができるごみ処理工場用自動クレーンの制御装置を提供すること。
【解決手段】クレーン1のクレーンガーダ11のごみピットPが撮影できる位置に所定の間隔Dを隔てて配設した2台のカメラ2a、2bと、この2台のカメラ2a、2bのステレオ視による視差を利用してごみピットP内に堆積したごみ高さを計測するごみ高さ計測手段と、ごみ高さ計測手段により計測されたごみ高さの情報をごみ高さマップとして記憶するごみ高さ記憶手段とを備え、ごみ高さ記憶手段にごみ高さマップとして記憶されたごみ高さの情報に基づいてクレーン1を運転することにより、クレーン1の運転中にグラブバケット12がごみピットP内に堆積したごみGに衝突しないようにする。
(もっと読む)
ごみ処理工場用自動クレーンの制御装置
【課題】クレーンの運転中にグラブバケットがごみ搬入扉前のごみピット内に堆積したごみに衝突する等の事故発生を防止すると共に、クレーンの稼働効率を向上することができるごみ処理工場用自動クレーンの制御装置を提供すること。
【解決手段】クレーン1のクレーンガーダ11のごみピットPが撮影できる位置に所定の間隔Dを隔てて配設した2台のカメラ2a、2bと、この2台のカメラ2a、2bのステレオ視による視差を利用してごみピットP内に堆積したごみ高さを計測するごみ高さ計測手段と、ごみ高さ計測手段により計測されたごみ高さの情報をごみ高さマップとして記憶するごみ高さ記憶手段とを備え、クレーン1の次作業のごみ掴み番地がごみ搬入扉Dr前で、かつ、そのごみ搬入扉Drが閉であれば、ごみ掴み番地のごみ高さの情報を取出すとともに、ごみの搬入を禁止するインターロック信号をごみ搬入扉制御装置に出力してそのごみ搬入扉を開禁止にする。
(もっと読む)
1 - 15 / 15
[ Back to top ]