
Fターム[3F204DA07]の内容
クレーンの細部(制御、安全) (2,955) | 被搬送物と荷役場所 (198) | 荷役場所 (91)
Fターム[3F204DA07]の下位に属するFターム
Fターム[3F204DA07]に分類される特許
1 - 12 / 12
洋上荷役システム及びこれを備えた洋上浮遊体
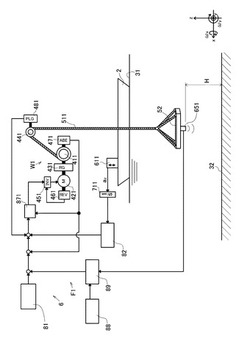
【課題】吊荷の水中高度を精度良く維持しつつ上下動を抑制することが可能な洋上荷役システムを提供する。
【解決手段】洋上浮遊体に取付けられるウィンチ等の荷役機構W1と、荷役機構W1より引き出され吊荷52を懸架するワイヤロープ511と、ワイヤロープ511の引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1を制御する制御手段6とを具備するものであって、制御手段6が、吊荷52に設けられる海底31との距離を測る水中高度検出部651と、吊荷52の水中高度Hを制御するためのワイヤロープ511の引き出し量補正値を水中高度検出部651からの検出値に基づいて出力する高度補正指令部88とを備え、高度補正指令部88からの出力値をフィードバックして荷役機構W1の制御を行うように構成した。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体

【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
(もっと読む)
低揺動洋上荷役システム又はこれを備えた洋上浮遊体
【課題】洋上において荷役機構の上下動に起因した吊荷等の負荷の揺動を抑制しその位置を一定に保つ揺動制御を行うにあたり、より小型で高効率の低揺動洋上荷役システムを新たに提供する。
【解決手段】揺動制御を行うための構成を備えたものにおいて、発電機5からインバータ7に向かう給電ライン11の一部に直流電力を備蓄する蓄電部13を接続して、揺動制御における回生時に電動モータ9から回生エネルギを蓄え、蓄えたエネルを力行時に電動モータ9に供給し得るようにした。
(もっと読む)
倉庫内で物体を移動するためのシステム
【課題】閉じられた空間に位置される物体を移動するためのシステムを提供する。
【解決手段】希望する位置に前記物体を把握しそして方向付けるために適用される少なくとも1つの遠隔操縦機3および実質的に水平である少なくとも2つの異なる方向に前記閉じられた空間で前記遠隔操縦機を移動するために適用される少なくとも1つの頭上走行クレーン機構2を含む。操作者によって制御される電子処理ユニットは頭上走行クレーン機構および遠隔操縦機の移動を電子的にそして自動的に決定することが可能である。
(もっと読む)
鍛造クレーン及び鍛造クレーンの制御方法
【課題】インバータ制御によって電動機を回転駆動することで、装置全体の軽量化を図りつつ、急激に大きな荷重が作用した場合にも過負荷とならないように速やかに巻き下げ動作を実施することが可能な鍛造クレーン及び鍛造クレーンの制御方法を提供する。
【解決手段】鍛造クレーンは、ワイヤが巻回されたドラムと、ドラムを回転駆動する電動機35と、電動機35に出力する交流電流を制御するインバータ36と、ドラムの回転を制動する制動部4と、鍛造モード及び通常モードの2種類のモードに設定可能なモード切替部7と、インバータ36を制御する主制御部5とを備え、主制御部5が、モード切替部7で鍛造モードに設定された場合に、制動部4によりドラムの回転を制動させるとともに、インバータ36に予備励磁指令を出力して、予め設定された予備電圧をインバータ36によって電動機35に印加させる。
(もっと読む)
鍛造クレーンシステム
【課題】複数の鍛造クレーンによって被鍛造物を安定的に搬送することが可能な鍛造クレーンシステムを提供する。
【解決手段】鍛造クレーンシステム100は、被鍛造物を吊下げる吊下げ手段、並びに、駆動源としての電動機23、電動機23を制御するインバータ25、及び電動機23の回転状態を検出してインバータ25に出力する回転状態検出部24を具備して自走するための走行手段20をそれぞれ有する複数の鍛造クレーン1と、これら複数の鍛造クレーン1のそれぞれのインバータ25に対して、同一の走行速度指令を出力可能な操作部10とを備え、インバータ25は、回転状態検出部24から出力される検出信号に基づいて、走行速度指令に応じた回転速度で駆動するように電動機23に対して交流電流を出力する。
(もっと読む)
フローティングクレーンによる共吊り運転制御方法及び装置
【課題】フローティングクレーンに備えられているシーケンス制御装置を用いて簡略な装置構成によって共吊り制御を行えるようにする。
【解決手段】一方のフローティングクレーン1に備えられている一方のシーケンス制御装置Sと、他方のフローティングクレーン2に備えられている他方のシーケンス制御装置Sとを通信ケーブル16により接続して、一方のシーケンス制御装置Sを主PLC17とすると共に、他方のシーケンス制御装置Sを副PLC18とし、主PLC17に、重量構造物の巻上・巻下運転指令を発する運転操作ボード23と、夫々のフローティングクレーン1,2の運転状況を表示するディスプレイ13’と、演算装置24とを設け、主PLC17に設けた運転操作ボード23を一人の操作員がディスプレイ13’の表示を見ながら操作することで2隻のフローティングクレーン1,2による重量構造物の共吊りを可能にする。
(もっと読む)
クレーンの振れ止め制御方法および振れ止め制御システム
【課題】半径方向の振れも考慮され、旋回終了地点における吊荷の振れの抑制効果に優れたクレーンの振れ止め制御方法および振れ止め制御システムを提供する。
【解決手段】ジブを旋回半径一定として加速区間、等速区間、減速区間の順で旋回させ、加速区間および減速区間の運転時間を、互いに同一の時間であって、吊荷の振子運動の周期Toの略整数倍に設定するとともに、加速区間の終了時点から、遠心力により生じる吊荷の半径方向の振動で最初の最大振れ変位になるまでの時間差を「(Δ/2)・To」として、等速区間の運転時間を「(n+Δ)・To」(n:0以上の整数)に設定する。
(もっと読む)
天井クレーン警報システム
【課題】移動するフックの下方向に向かって単一指向性を有する警報を発する天井クレーン警報システムを提供する。
【解決手段】天井クレーンを利用する作業において作業者にフック9の位置を検知させる天井クレーン警報システムであって、少なくともひとつの警報器10を有する警報手段と、前記フックの前記天井クレーン上の位置を検出するフック位置検出手段4と、前記検出したフック位置から、前記警報手段と前記フック下方間との角度を算出する警報器角度算出手段5と、前記検出した角度へ指向性が向くように警報手段を移動させる警報器首振り手段3とを備える。
(もっと読む)
大型構造物の運搬制御システム
【課題】大型構造物を複数の起重機船のジブで吊上げて運搬する際に、大型構造物に生じる負荷を軽減しつつ、安全かつ精度よく容易に運搬可能とする大型構造物の運搬制御システムを提供する。
【解決手段】ゴライアスクレーン1に運搬物用GPS受信機5e、5f、両起重機船2a、2bにそれぞれ起重機船用GPS受信機5a〜5b、5c〜5dを設置し、運搬中のこれら1、2a、2bの絶対位置および相対位置をリアルタイムで把握し、情報処理装置8に予め入力された運搬経路を示す位置データと、各GPS受信機5a〜5fから受信した位置データとの比較結果をリアルタイムで表示装置10、10に表示し、また、予め入力された起重機船2a、2bの適正な相対位置データと、受信した相対位置データとの比較結果をリアルタイムで表示装置10、10に表示する。
(もっと読む)
シミュレーション装置
【課題】 移動式クレーンの好適な配置位置を計画するための情報を得る。
【解決手段】 建造物が存在するエリアに物品を搬入出する際に、使用する移動式クレーンの配置位置を求めるためのシミュレーション装置10であって、建造物の設置データ、物品の寸法形状データ、物品の搬入出位置、移動式クレーンの仕様データが入力可能とされた入力部16と、入力部16に入力されたデータに基づいて、移動式クレーンの配置位置を設定するクレーン位置設定部24と、移動式クレーンの動作領域を算出する動作領域算出部25と、動作領域算出部25で算出された移動式クレーンの動作領域に対する建造物占有領域の干渉率を算出する干渉率算出部26とを具備している。
(もっと読む)
組立て工場
【課題】組立てる車両を1台づつ回転組立て台に載置し、ゆっくりこの組立て台を回転させながら車両組立てを実行する新しい工法を実施するために、この回転組立て台に周辺から部品およびモジュールを搬入するための合理的な運搬装置を提供する。
【解決手段】ホイストおよびこのホイストが走行するレールからなる装置について、回転組立て台の上空では、ホイストを懸垂するレールを回転組立て台に同期して回転できるように同期手段を設ける。
(もっと読む)
1 - 12 / 12
[ Back to top ]