
Fターム[3F333FE08]の内容
フォークリフトと高所作業車 (11,384) | 制御機器 (803) | 信号伝送装置 (74)
Fターム[3F333FE08]に分類される特許
1 - 20 / 74
物品仕分設備の物品入出庫方法

【課題】多数種類の物品を扱うようにしながらも、小型化を図ることができる物品仕分設備の物品入出庫方法を提供する。
【解決手段】複数種類の物品を保管する物品保管部と、物品仕分情報に基づいて、保管用収納器から物品を取出して集約用容器に投入する物品投入処理を行う物品仕分処理部とを備える物品仕分設備が設けられ、物品仕分情報に基づいて、物品保管部からパレットを順次出庫し、かつ、出庫したパレットから保管用収納器を取出して物品仕分処理部に搬送する収納器搬送処理、及び、パレットから取出した保管用収納器のうちで、物品投入処理に用いないため物品仕分処理部に搬送しない保管用収納器を、異なる種類の物品を収納する保管用収納器が一つのパレットに載置される混載状態となる形態で、パレットに積層して物品保管部に保管する収納器保管処理を行う。
(もっと読む)
搬送装置

【課題】RFIDタグが付された荷物を搬送するための搬送装置において、被搬送物品に付されたRFIDタグを精度良く読み取ることを可能とすること。
【解決手段】搬送装置1は、その前面に設けられた物品搬送部5と、この物品搬送部5の動作を操作するための操作部10とを有している。物品搬送部5には、RFIDタグを読み書きするためのリーダライタ用アンテナ20が設けられている。さらに、リーダライタ用アンテナ20の背面には、アンテナ20よりも大きな面積の網状金属部材25が設けられている。
(もっと読む)
データレコーダ、運行管理装置
【課題】フォークリフトの移動の停止を正確に判定する。
【解決手段】フォークリフト20の移動速度と、その移動方向が前進と後退のいずれであるかを表す識別信号とをデータレコーダ10で取得し、この移動速度と移動方向との組み合わせが所定の条件を満たすときに、フォークリフト20が備えるセンサの検出結果に関わらず、フォークリフト20の移動が停止したと判定して、この判定結果を含む運行データを記録媒体60に記録し、この記録データを運行管理装置70で解析する。
(もっと読む)
産業車両の安全装置
【課題】フォークリフトに搭載された警報コントローラからトリガー波を送信し、作業員の持つRFIDタグで受信して警報を安定して発する。
【解決手段】フォークリフトのRFIDリーダから発するトリガー波αを長波帯域の電磁波とし、ヘッドガード16の上部に水平姿勢で取り付けられた送信アンテナ22は、周長が3.0以上で10.0m以下のループ状で、複数回に巻回されアンテナ線の全長が、送信波の波長の0.005〜0.015倍の範囲となる多重巻きのループ体22aとし、このループ体22aが樹脂製カバー体51内に収容された磁界ループアンテナとした。
(もっと読む)
作業機
【課題】新たな入力部を設けずに、タイマ情報を設定することが可能な作業機を提供すること。
【解決手段】作業機1は、エンジン529を有する作業機本体5と、ユーザによって入力された操作を作業機本体5に送信可能な送信機3と、を有し、送信機3に一定期間操作の入力がなされなかった場合に、送信機3の電源を自動的にオフするオートパワーオフ機能と、オートパワーオフ機能に連動して、エンジン529を停止するエンジン停止機能と、オートパワーオフ機能が発揮されオートパワーオフが実行されるまでの時間の設定であるタイマ情報を設定するタイマ設定機能と、を有し、タイマ設定機能は、タイマ設定モードに切り替えることによってなされる。
(もっと読む)
フォークリフト
【課題】1本の指の操作で、フォークの2つの動作を同時に行えるようにする。
【解決手段】フォークリフトは、荷役用のフォークを操作するための油圧操作部4が表示された表示装置2と、油圧操作部4に対するタッチ操作を検出するためのタッチセンサ25と、タッチセンサ25からの検出信号を受けて、フォークの動作を制御する制御装置とを備える。油圧操作部4には、水平軸Xと、水平軸Xに直交する垂直軸Yとが設定され、水平軸Xおよび垂直軸Yの交点に基準位置Oが設定される。フォークは、タッチセンサ25が基準位置Oから水平軸X方向へのスライド操作を検出すると、第1の動作をし、タッチセンサ25が基準位置Oから垂直軸Y方向へのスライド操作を検出すると、第2の動作をし、タッチセンサ25が基準位置Oから水平軸X方向および垂直軸Y方向に対して斜め方向へのスライド操作を検出すると、第1の動作および前記第2の動作を同時にする。
(もっと読む)
荷役作業車両の管理装置
【課題】 作業環境が異なる場合でも、運転者の技能を適切に判定することが可能な指標を提供する荷役作業車両の管理装置を提供する。
【解決手段】 荷役作業車両の管理装置が、処理装置を有する。この処理装置は、荷物を持ち上げて走行する荷役作業車両から取得された運転情報に基づいて、エネルギ消費量、及び作業環境に依存する稼動状況変数を算出する。さらに、算出された稼働状況変数の大きさに応じて、前記エネルギ消費量を正規化して正規化エネルギ消費量を算出する。
(もっと読む)
産業車両用データ通信システムの動作切替装置及びモード切替装置
【課題】
産業車両の走行系および作業系の積算処理を行う機器が分散していたとしても、各機器に一括して積算処理及び積算処理の中断を指示できるようにし、積算処理と積算処理の中断との切替作業を簡易にすることによって作業時間を短縮する。
【解決手段】
制御部71はデータ伝送路20を介して特定のデータ送信部72sから送信される信号を受信しなければ、データ送信部72から送信されるデータを使用する第1の動作態様で動作する。特定のデータ送信部72sがデータ伝送路20に接続されると、特定のデータ送信部72sはデータ伝送路20に自己が接続されていることを示す信号(例えば起動信号)を送信する。制御部71はデータ伝送路20を介してこの信号(例えば起動信号)を受信すると、特定のデータ送信部72sから送信されるデータを使用する第2の動作態様に切り替わる。
(もっと読む)
視界補助システム
【課題】移動体を運転する運転者の視界を補助する視界補助システムを提供すること。
【解決手段】フォークリフト10を運転する運転者の視界を補助する視界補助システムは、フォークリフト10の後端中央上部RCU及び後方遠方を斜め上方から撮像して第一入力画像を出力する第一撮像装置C1と、フォークリフト10の後端右側周辺を上方又は斜め上方から撮像して第二入力画像を出力する第二撮像装置C2と、フォークリフト10の後端左側周辺を上方又は斜め上方から撮像して第三入力画像を出力する第三撮像装置C3と、前方を向く運転者が視認するように設置された表示装置Dと、第一入力画像、第二入力画像、及び第三入力画像を合成した出力画像を表示装置Dに出力する出力画像生成装置Mと、を備える。
(もっと読む)
運行管理装置および運行管理方法
【課題】従来の方法ではフォークリフトの運行を十分に最適化することは難しい。
【解決手段】運行管理装置100は、対象物を運搬する運搬機の運行を管理する。運搬要求装置は運行管理装置100に対して対象物を運搬するよう要求し、運搬機は運行管理装置100に対して行き先を指示するよう要求する。運行管理装置100は、運搬要求装置の要求ごとに緊急の度合いを保持する緊急度保持部と、運搬機から指示を要求されると、緊急度保持部を参照し、運搬の要求の緊急の度合いが高いほどその運搬の要求を優先して運搬機に割り当てる運搬要求割当部と、運搬要求割当部によって割り当てられた運搬の要求に基づいて、運搬機に行き先に関する情報を送信する情報送信部と、を有する。
(もっと読む)
バッテリ式産業車両
【課題】車両の動作状態を簡単なシステム構成によって確認することができるとともに、迅速に確認すること。
【解決手段】バッテリ式フォークリフトに、車両の動作状態の記録を、動作単位毎に当該動作の開始から終了までに要した時間と対応付けて収集する手段(表示ユニット)と、その収集したデータを記憶する手段(EEPROM)と、を具備した。そして、バッテリ式フォークリフトに搭載されているディスプレイ25aに、記憶する手段に記憶されている動作状態の記録を表示させるようにした。
(もっと読む)
バッテリ式産業車両
【課題】バッテリの充電傾向を簡単なシステム構成によって確認することができるとともに、迅速に確認すること。
【解決手段】バッテリ式フォークリフトに、充電開始時におけるバッテリ26の残容量を算出する手段(表示ユニット25)と、バッテリ26の充電回数を、充電開始時におけるバッテリ26の残容量と対応付けて計数する手段(表示ユニット25)と、を具備した。そして、バッテリ式フォークリフトに搭載されているディスプレイ25aに、計数結果(充電開始時におけるバッテリ26の残容量に応じて計数した充電回数)を、所定の表示形式(度数分布形成)で表示させるようにした。
(もっと読む)
フォークリフトのバックレスト
【課題】RFID用アンテナを適切な位置及び向きに取り付け可能な構造としたバックレストを提供する。
【解決手段】フォークリフトのバックレストであって、バックレストの垂直方向、水平方向、前後方向および回転方向の少なくとも1つ以上の方向に対して位置及び角度の調節が可能なRFID用アンテナ6の取り付け手段7を備える。
(もっと読む)
作業車の通信管理装置、作業車及び作業車の管理システム
【課題】より多くの動態情報をサーバに送信することができる作業車の通信管理装置を提供する。
【解決手段】走行機能を有するキャリア部10と、キャリア部10に旋回自在に搭載される旋回部11と、動態情報を記憶する記憶部21と、キャリア部10と旋回部11の間で動態情報を伝達する信号伝達装置16と、記憶された動態情報をサーバに送信する通信部22と、を備える作業車の通信管理装置2である。
そして、キャリア部10及び旋回部11のそれぞれに記憶部21,31が設置されるとともに、キャリア部10及び旋回部11の少なくとも一方に通信部22,32が設置されている。
(もっと読む)
フォークリフト
【課題】本発明の目的は、荷取り時や荷降ろし時に荷および荷の周囲を作業者が確認することができるフォークリフトを提供することにある。
【解決手段】フォークと共に昇降し、フォークの前方をフォークの上方から撮影すると共に撮影方向または撮影画角の少なくとも一つを含む撮影条件を変更可能なカメラと、カメラの映像を表示するモニタと、フォークの停止揚高を選択するためのフォーク停止揚高選択部と、フォークの各停止揚高に対応してカメラの撮影方向または撮影画角の少なくとも一つを含む撮影条件が記憶されたカメラ撮影条件記憶部と、フォーク停止揚高選択部により選択されたフォークの停止揚高に応じてカメラの撮影条件を変更するカメラ制御部とを備える。
(もっと読む)
作業車両の制御システム
【課題】作業車両が施設内を走行するに際し施設内の場所によって制限がある場合に、確実にその制限を遵守することができる作業車両の制御システムを提供する。
【解決手段】エリア進入検出手段30によってフォークリフト10が屋内エリアB(あるいはエリアA)に進入したことが検出された場合に、屋内エリアB(あるいはエリアA)に対応づけられた車速上限値以下の車速でフォークリフト10を走行制御する走行制御手段が、フォークリフト10に設けられる。
(もっと読む)
作業機の遠隔操作装置及び遠隔操作方法
【課題】作業機の高精度の遠隔操作を、容易且つ簡単な操作によって行い得るようにした作業機の遠隔操作装置及び遠隔操作方法を提案する。
【解決手段】遠隔指令装置Qと作業機Sに設けられた作業機制御装置Rからなる作業機の遠隔操作装置において、遠隔指令装置Qに、少なくとも、特定の座標系と、基準信号を発信する基準信号発信手段Aと、作業機Sの移動方向と移動速度を指示する操作手段Bと、操作指令信号を出力する操作指令信号出力手段Cと、重力加速度方向検出手段Dとを備える一方、作業機制御装置Rには、少なくとも、基準座標系と、遠隔指令装置Qの特定の座標系における一軸を基準座標系における方向として検出して出力する方向信号出力手段Eを備え、さらに遠隔指令装置Qと作業機制御装置Rの何れか一方に、遠隔指令装置Qの基準座標系上の姿勢を算出する姿勢算出手段Fと、作業機Sを移動させるための制御信号を算出する制御信号算出手段Gを備える。
(もっと読む)
ハイブリッド型フォークリフトの制御システム
【課題】ハイブリッド型フォークリフトにおける制御を簡素化することができるハイブリッド型フォークリフトの制御システムを提供する。
【解決手段】ハイブリッド型フォークリフトには、全体を統合制御するとともにLECU52が備える演算処理機能を搭載したHVECU53が設けられている。HVECU53は、LECU52と通信可能となっており、リフトレバー34又はティルトレバー35からLECU52へ入力される入力情報がLECU52からHVECU53へバイパスされるようになっている。HVECU53とLECU52との間が通信不能な状態においては、LECU52が荷役モータ43への指令値、及び荷役バルブ23の開閉指令値を演算するとともに、荷役モータ43における回転数の指令値をLMECU51へ出力するフェールセーフ処理へ移行する。
(もっと読む)
荷役車両における荷役操作装置の識別システム
【課題】本発明の目的は、荷役操作装置の識別のための装置的要素を追加することなく、選択されている荷役操作装置を自動的に識別することができる荷役車両における荷役操作装置の識別システムの提供。
【解決手段】荷役操作装置の種類を識別する制御手段を備える。荷役操作装置は、一方向へ傾倒可能な一対の第1操作レバーと、第1操作レバー毎に設けられる第1スイッチと、を備える第1操作装置、若しくは、2方向へ傾倒可能な単一の第2操作レバーと、第2操作レバーが備える単一の第2スイッチと、を備える第2操作装置との、いずれか一方から選択される。制御手段と荷役操作装置の間には、レバー信号を伝達する一対のレバー信号経路と、スイッチ信号を伝達する一対のスイッチ信号経路が備えられ、制御手段は一対のスイッチ信号経路におけるスイッチ信号の差異を監視し、スイッチ信号の差異を認識するとき、荷役操作装置を第1操作装置と識別する。
(もっと読む)
フォークリフトのツメにRFIDリーダを搭載したスマート・ロジスティック・システム
無線自動識別(RFID)タグに呼掛けを行うためのスマート・ロジスティック・システムは、a)フォークリフトのツメに搭載するのに適したポータブルな支持および保護構造であって、上面および底面を含む取り付け部を含み、また支持および保護構造の少なくとも一部分に沿って各々延びるコンポーネント部を含み、取り付け部が支持および保護構造をツメに固定させるように構成されており、コンポーネント部がコンパートメントを含んでいる支持および保護構造と、b)コンパートメントの内側にしっかりと固定されて収容されたRFIDリーダと、c)RFIDアンテナと、d)コンポーネント部にしっかりと固定されて収容された電源とを含む。支持および保護構造は、ポータブル型であり、RFIDリーダは、自給自足型であって、スマート・ロジスティック・システムは、数秒以内でフォークリフトの別のツメに移し替えることができる。 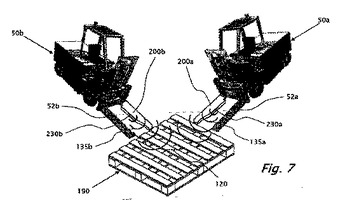 (もっと読む)
(もっと読む)
1 - 20 / 74
[ Back to top ]