
Fターム[3G071EA02]の内容
Fターム[3G071EA02]に分類される特許
121 - 133 / 133
原子力発電プラントおよびその運転制御方法
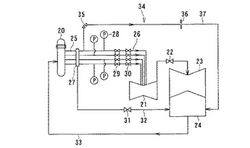
【課題】圧力損失が少ない蒸気加減弁を活用し、エネルギ損失を少なくして、原子炉圧力容器からの蒸気の圧力が定格圧力より高低変動しても、容易に調整でき、原子炉出力一定維持を満たす原子力発電プラントおよび運転制御方法を提供する。
【解決手段】原子炉圧力容器20と蒸気タービンを接続する主蒸気管25に、圧力ヘッダ27、主蒸気止め弁29および蒸気加減弁30を介装させ、原子炉圧力容器からの蒸気の流量を蒸気加減弁で制御して蒸気タービンに供給し、蒸気タービンで動力を発生させ、タービン排気を復水器24で凝縮させて原子炉圧力容器に戻し、原子炉圧力容器からの蒸気を復水器に逃がすタービンバイパス管32で圧力ヘッダと復水器とを接続する構成の原子力発電プラントにおいて、圧力ヘッダの下流側と蒸気加減弁の上流側の間の主蒸気管に入力側が接続され、原子炉圧力容器からの蒸気の圧力を調整する蒸気圧力調整装置34を備えた。
(もっと読む)
タービン制御弁試験のための流量補償

【課題】タービン制御弁(28)動作安全試験工程中の蒸気ボイラ圧力変化またはタービン出力変化を最小限に抑える方法を提供する。
【解決手段】本発明の方法は、制御弁(28)位置を補償アルゴリズムへのフィードバックとして使用して、周期的動作試験中のタービン制御弁(28)の閉じおよび再開によって引き起こされる流れの乱れを最小限に抑える。平行タービン入口制御弁(28)を流れる全質量流量を一定に保ち、蒸気発生器圧力が一定に維持され、入口制御弁試験中に入口圧力調整器が影響を受けない。平行タービン入口制御弁(28)を通る全質量流量を一定に保ち、入口制御弁(28)試験中のタービン出力変化も最小限に抑えられる。追加プロセスパラメータの監視は不要である。個々の平行弁の位置が、入口弁(28)位置の閉ループ制御のために使用され、一定の流量を維持するのに十分である。
(もっと読む)
蒸気タービン発電設備及びその運転方法
【課題】 本発明は、MSRにおけるわずかな圧力変動に基づく誤動作の可能性を小さくするとともにMSRの圧力保護を行うことができる蒸気タービン発電設備及びその運転方法を提供することを目的とする。
【解決手段】 GV13の全閉を指示しているときに、圧力検出スイッチ20で検出した圧力が所定の圧力値より高く、且つ、GV13の少なくとも1つが全閉状態でないことを検出すると、圧力上昇保護部21がMSV12の全閉を指令して、タービントリップする。
(もっと読む)
車両用発電装置
【課題】車両のモータを駆動するための電力をエンジンの排熱を用いて常に効率良く発電することのできる。
【解決手段】温度センサ4によってエンジンEの温度Tを検出するとともに、検出温度Tが低いときはポンプ3の流量を低下させ、検出温度Tが高いときはポンプ3の流量を増加させるようにしたので、常にエンジンEの温度Tに応じた適正な量の作動流体をエンジンE側と熱交換させることができ、モータMを駆動するための電力をエンジンEの排熱を用いて常に効率良く発電することができる。
(もっと読む)
蒸気タービンを利用したプロセス蒸気の制御装置
【課題】 蒸気タービンで発生した機械エネルギーを確実に使用することのできる、蒸気タービンを利用したプロセス蒸気の制御装置を得ること。
【解決手段】 蒸気供給管8に蒸気圧力制御弁9を取り付けて蒸気使用機器7と接続する。蒸気使用機器7の下部にスチームトラップ13を介してエゼクタ1と接続する。エゼクタ1と循環通路2と循環ポンプ3とで復水回収ポンプを構成する。循環ポンプ3に誘導電動機15を介在して蒸気タービン4を接続する。蒸気タービン4には分岐管10とタービン蒸気排出管11を接続する。
蒸気使用機器7には、蒸気圧力制御弁9と蒸気タービン4で所定値に減圧された蒸気が供給されると共に、蒸気タービン4の機械エネルギーは復水回収ポンプで確実に使用される。
(もっと読む)
蒸気タービンを利用したプロセス蒸気の制御装置
【課題】 蒸気タービンで発生した機械エネルギーを確実に使用することのできる、蒸気タービンを利用したプロセス蒸気の制御装置を得ること。
【解決手段】 蒸気供給管8に蒸気圧力制御弁9を取り付けて蒸気使用機器7と接続する。蒸気使用機器7の下部にスチームトラップ13を介してエゼクタ1と接続する。エゼクタ1と循環通路2とタンク17及び循環ポンプ3とで真空ポンプ手段を構成する。循環ポンプ3に誘導電動機15を介在して蒸気タービン4を接続する。蒸気タービン4には分岐管10とタービン蒸気排出管11を接続する。
蒸気使用機器7には、蒸気圧力制御弁9と蒸気タービン4で所定値まで減圧された蒸気が供給されると共に、蒸気タービン4の機械エネルギーは真空ポンプ手段で確実に使用される。
(もっと読む)
再生サイクル発電装置
【課題】第1または第2の気液分離器側における気体状態の作動流体が増加した場合でも、ポンプに気体が吸入されることによる吐出不良を効果的に防止することのできる再生サイクル発電装置を提供する。
【解決手段】第1の気液分離器5に流入する作動流体が気体状態であることを第1の流体センサ6によって検知すると、第1のポンプ10の流量を低下させ、第2の気液分離器8に流入する作動流体が気体状態であることを第2の流体センサ9によって検知すると、第2のポンプ11の流量を低下させるようにしたので、第1または第2の気液分離器5内の気体状態の作動流体が減少するまでの間、第1または第2の気液分離器5内に液体状態の作動流体を十分に確保しておくことができる。
(もっと読む)
タービン制御装置およびタービン制御装置の弁開度指令補正方法
【課題】関数発生器の弁開度/流量特性と蒸気加減弁の弁開度/流量特性とのずれにより、速度信号もしくは負荷設定値の変化にタービン出力が比例して変化しない領域が存在する。
【解決手段】蒸気加減弁の弁開度/流量特性に対応した関数発生器により弁開度指令を出力し、タービンの速度・負荷を制御するタービン制御装置において、蒸気加減弁2の流入蒸気の圧力および温度を圧力・温度検出器15で検出し、タービン出力を出力検出器16(20)で検出し、この出力検出器により検出されたタービン出力の値を圧力・温度補正器17により補正し、蒸気流量指令と補正されたタービン出力の特性とを特性出力部18によりプロットし、出力装置により運転員に呈示するようにした。
(もっと読む)
蒸気タービンを利用したプロセス蒸気の制御装置
【課題】 装置の初期立ち上がりを短時間で行うことのできる、蒸気タービンを利用したプロセス蒸気の制御装置を得ること。
【解決手段】 蒸気供給管1に蒸気流量計8と蒸気制御弁2を取り付けてプロセス蒸気管3と接続する。蒸気供給管1を分岐して分岐管4を接続する。分岐管4には蒸気流量計14と緊急遮断弁15を取り付ける。分岐管4の端部は蒸気タービン5の入口17と接続する。蒸気タービン5の出口18は連通管6によってプロセス蒸気管3と接続する。
蒸気供給管1を通過する蒸気量が流量計8で、また、蒸気タービン5を通過する蒸気量が流量計14でそれぞれ検出され、タービン効率を最良に維持すると共に、蒸気使用箇所での必要蒸気量が供給できるように制御弁2,13が制御される。
(もっと読む)
タービン制御装置,その制御方法及びタービンシステム
【課題】
従来の制御では、テスト弁以外の弁の流量を組み合せた蒸気流量特性に基づいて弁を制御する場合、その為に弁テスト対象外の弁の組合せによる蒸気流量特性を求めておく必要がある。
【解決手段】
流量指令部からの要求流量信号を、一つのタービンの流体流量を調整する複数の制御弁の開度信号に変換して制御弁を制御するタービン制御装置において、前記複数の制御弁の一つの弁テストを実施中に、弁テスト対象弁とその他の制御弁の開度に基づいてタービンに流入する流量を算出する機能と、前記算出した流量に基づいてテスト弁の変動分に対する補正量を算出する機能と、前記要求流量信号へ前記補正量を加算する機能を備えることを特徴とするタービン制御装置。
(もっと読む)
タービン速度制御装置およびパルス変調制御回路
【課題】 蒸気量を制御する調整バルブの弁開度制御によりタービン速度制御を行うタービン速度制御装置において、制御性を向上し、起動から昇速開始時に立ち上がりを早くすると共に、オーバシュートを抑制して速やかに目標速度へ収束させる。
【解決手段】 タービン速度と指令との偏差に反比例変化するパルス間隔で所定幅のパルスを出力するPFM回路7と、該所定幅より大きいパルス幅の先行補助信号を発生させる回路71とを備え、切換条件ロジック回路61にて決定される、昇速開始からの所定の期間は、先行補助信号を弁開度制御信号72aに用い、この後PFM信号を切換選択して弁開度制御信号72aに用いる。
(もっと読む)
蒸気タービンを利用したプロセス蒸気の制御装置
【課題】 プロセス蒸気圧力の変動を極力防止する。
【解決手段】 蒸気供給管1に蒸気制御弁2を取り付けてプロセス蒸気管3と接続する。蒸気供給管1を分岐して分岐管4を接続する。分岐管4には蒸気流量計14と緊急遮断弁15を取り付ける。分岐管4の端部は蒸気タービン5の入口17と接続する。蒸気タービン5の出口18は連通管6によってプロセス蒸気管3と接続する。分岐管4を更に分岐して第2分岐管7を設け、緊急開閉弁19を介してプロセス蒸気管3と接続する。
蒸気タービン5入口側の緊急遮断弁15が閉弁すると、第2分岐管7の緊急開閉弁19が瞬時に開弁することによって、プロセス蒸気管3から蒸気使用箇所へ供給される蒸気の圧力が変動することはない。
(もっと読む)
蒸気タービン動力冷却機ユニット用の統合適応能力制御
蒸気タービン駆動冷却機ユニット(10)のための制御システムが提供される。制御システムは、調速機(48)、圧縮機入口導羽根(80)、及び高温ガスバイパス弁(84)の能力の全範囲を自動的に使用して、冷却機(10)の処理能力を制御して、サージ防止及びオーバライド制御機能を提供し、動作の最大効率を維持しながら望ましくない動作範囲を防止する。 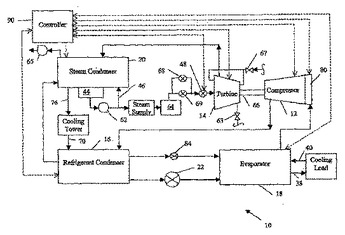 (もっと読む)
(もっと読む)
121 - 133 / 133
[ Back to top ]