
Fターム[3G092EC05]の内容
機関出力の制御及び特殊形式機関の制御 (141,499) | 制御手法 (4,176) | 学習制御 (431)
Fターム[3G092EC05]に分類される特許
1 - 20 / 431
内燃機関の空燃比制御装置
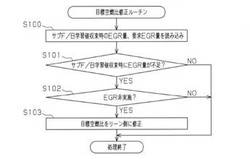
【課題】排気再循環が正常に行われなかったときの内燃機関のエミッションの悪化を好適に抑制することのできる内燃機関の空燃比制御装置を提供する。
【解決手段】EGR実施の有無によりメインフィードバック制御の目標空燃比を変更するとともに、サブフィードバック補正値の収束時のEGR量が要求に満たない状態となっていたときには(S101:YES)、EGR非実施時のメインフィードバック制御の目標空燃比をリーン側に修正する(S103)ようにした。
(もっと読む)
内燃機関の制御装置

【課題】内燃機関の制御装置に関し、燃料の吹き抜けを抑制してエンジン出力,排気性能を向上させる。
【解決手段】気筒20内に燃料を噴射する筒内噴射弁11と、吸気ポート17に燃料を噴射するポート噴射弁12とを有する内燃機関10の制御装置1に、筒内噴射弁11から噴射される筒内噴射量を算出する噴射量算出手段5を設ける。また、ポート噴射弁12から噴射されるポート噴射量を制御するポート噴射制御手段2と、吸気弁27及び排気弁28がともに開弁状態となる重複期間を制御する重複期間制御手段4とを設ける。
さらに、筒内噴射量に基づいて、ポート噴射弁12からのポート噴射量及び重複期間をともに変更する変更手段6を設ける。
(もっと読む)
内燃機関の制御装置
【課題】自動停止時のピストン位置の適切な位置に調整して速やかな再始動を実現することができる内燃機関の制御装置を提供する。
【解決手段】内燃機関1の自動停止を行うために燃料噴射弁4からの燃料噴射が停止された後、スロットルバルブ13が全閉時よりも開き側の値である目標開度に調整される。この目標開度を開き側の値に設定するほど、上記自動停止により機関回転が停止したときに吸気行程となる気筒において、ピストン6が吸気上死点寄りの位置で停止するようになる。こうしたことを考慮して、上記目標開度は、上記自動停止により機関回転が停止したときに吸気行程となる気筒において、ピストン6が同吸気行程の中間付近から吸気上死点までの範囲に停止する値に設定される。
(もっと読む)
可変バルブタイミング機構の制御装置
【課題】クランク軸が逆転した場合でも精度よくカム軸の回転位相を検出でき、良好なバルブタイミング制御を行う。
【解決手段】クランク軸の1/2の回転速度で回転するスプロケットと電動モータのステータが一体に回転する電動VTCのモータ軸回転角、クランク軸正回転角、クランク軸逆回転角、最終的なクランク軸回転角、スプロケットの回転角を、制御周期間のモータ軸回転角変化量、同じくスプロケット回転角変化量、モータ軸回転角、吸気カム軸の回転角変化量、吸気カム軸の現在の実回転角(VTC実角度)、を順次算出し、VTC目標角度に、VTC実角度が追従するようなVTC操作量を演算する。
(もっと読む)
LPGエンジンの空燃比制御方法及び空燃比制御装置
【課題】LPGエンジンについて、コストの高騰を伴うことなく使用するLPGの組成をその都度判定して、良好な空燃比制御を実行できるようにする。
【解決手段】LPGエンジンの排気管に設けた排気性状検出手段を介して排気の状態を連続的に検知することによりフィードバック制御で燃料噴射量を調整する空燃比制御装置が行う空燃比制御方法において、その空燃比制御装置が、所定の操作を行うことにより排気性状検出手段の出力信号に変化を生じさせ、この変化を基に所定の判定方法で現在使用しているLPGの燃料組成を判定し、その後の制御に反映させることを特徴とするものとした。
(もっと読む)
内燃機関の制御装置
【課題】運転者の運転特性に応じて内燃機関の制御パラメータを最適化することが可能な内燃機関の制御装置を提供する。
【解決手段】規定された走行モードでの筒内状態量変化に基づいて定められた状態量変化最大基準値ΔXb-aveに対する実際の走行状態での筒内状態量変化により求められた状態量偏差平均値ΔXaveの比として運転者過渡度Rtを算出する。運転者過渡度Rtが1以上である場合には、筒内酸素濃度を高くするようにEGRバルブの開度を比較的小さく設定しておく。一方、運転者過渡度Rtが1未満である場合には、この運転者過渡度Rtが小さいほど、筒内酸素濃度を低くするようにEGRバルブの開度を比較的大きく設定しておく。これにより、過渡運転時に失火を招くことがなく、且つ気筒内の酸素濃度をより低く設定することで排気エミッションの改善が図れる。
(もっと読む)
可変動弁装置の制御装置
【課題】バルブタイミングを機関運転状態に応じて変更することが可能な状況をより多く確保することのできる可変動弁装置の制御装置を提供する。
【解決手段】内燃機関1の可変動弁装置20は、吸気バルブ21のバルブタイミングVTを変更する油圧式のバルブタイミング変更機構30と、バルブタイミングVTを中間角位相VTmdlに固定するバルブタイミング固定機構40と、バルブタイミング変更機構30の動作を制御する電子制御装置81とを備える。電子制御装置81は、バルブタイミング変更機構30の動作状態がバルブタイミングVTを変更することが可能な位相解除状態のとき、作動油の成分に応じてバルブタイミングVTの変更可能範囲を制限する。
(もっと読む)
内燃機関の吸気量制御装置
【課題】誤学習時における各学習値の修正を適正に行うことのできる内燃機関の吸気量制御装置を提供する。
【解決手段】この装置は、アイドル運転時における吸気量を学習するISC学習制御処理とスロットル機構の流量特性を学習するスロットル特性学習処理とを実行する。吸気量の調節制御を、ISC学習制御処理を通じて学習したISC学習値とスロットル特性学習処理を通じて学習したスロットル特性学習値とに基づき実行する。アイドル運転時に所定レベル以上の機関回転速度NEの変化が生じたときに(S11:YES)、スロットル特性学習値の直近の更新時における更新量が判定値J1以上であるときには(S12:YES)、各学習値のうちのスロットル特性学習値のみを修正する(S13)。更新量が判定値J1未満であるときには(S12:NO)、各学習値のうちのISC学習値のみを修正する(S14)。
(もっと読む)
制御装置
【課題】可変バルブタイミング機構の学習制御における誤学習を未然に防止して制御の精度を一層高める。
【解決手段】吸気弁のバルブタイミングが所定の基準タイミングとなった場合においてOCV9に入力している制御信号のデューティ比を学習し、以後の可変バルブタイミング制御に使用するシステムにおいて、内燃機関のアイドリングストップの際には学習を禁止することとし、エンジン回転数が低下せずに安定的している状況に限定して学習を行うこととした。これにより、バルブタイミングを真の基準タイミングよりも遅角させてしまう制御信号を学習値として学習することがなく、バルブタイミング制御の応答性の悪化や可変バルブタイミング機構6が故障しているとの誤検知を回避することができる。
(もっと読む)
内燃機関のEGR制御装置
【課題】EGR装置を備えたエンジンにおいて、EGR弁の全閉位置(EGRガス流量が最小となる開度)を精度良く学習できるようにする。
【解決手段】EGR弁26の全閉位置でフリクションが最大になってEGR弁26の駆動トルク(負荷トルク)が最大となるEGR弁26の場合、EGR弁26の駆動電圧(EGR弁26を駆動するモータに印加する電圧)を一定電圧にしてEGR弁26の開度を変化させるように制御した場合、EGR弁26の駆動トルクが最大となるEGR弁26の開度(つまり全閉位置)でEGR弁26の角速度(EGR弁26の開度の変化速度)が最小となる。この点に着目して、所定の全閉位置学習条件が成立したとき、EGR弁26の駆動電圧を一定電圧にしてEGR弁26の開度を変化させるように制御して、このときにEGR弁26の角速度が最小となるEGR弁26の開度を全閉位置として学習する。
(もっと読む)
内燃機関のEGR制御装置
【課題】EGR装置を備えたエンジンにおいて、EGR弁の全閉位置(EGRガス流量が最小となる開度)を精度良く学習できるようにする。
【解決手段】EGR弁31の開度が全閉位置を通過するときにEGR配管29内のガス温度の変化が最も小さくなることに着目して、EGR配管29にガス温度センサ33を配置し、所定の学習実行条件が成立したときに、EGR弁31の開度を所定の基準位置(例えば設計上の全閉位置又は前回の全閉位置学習値)から減少させた後に基準位置よりも大きい開度まで増加させることで、EGR弁31の開度が全閉位置を通過するようにEGR弁31の開度を変化させ、このようにしてEGR弁31の開度を変化させたときに、ガス温度センサ33で検出したガス温度の変化が最小となるEGR弁31の開度(ガス温度が最低値となるEGR弁31の開度)をEGR弁31の全閉位置として学習する。
(もっと読む)
内燃機関の制御装置
【課題】経時的な機関構成部品劣化や燃焼室内のデポジット付着による、各気筒間における機械圧縮比のバラツキを検出しうる手段を有する内燃機関の制御装置を提供すること。
【解決手段】本発明の内燃機関の制御装置は、吸気および排気を複数の気筒のうちの一部の気筒において休止するように制御しうる休止手段を有し、新気吹き抜け時に、複数の気筒の各気筒に対して、休止手段により他の気筒を休止させて2つの異なる機械圧縮比による機関運転を実行し、実行された各機関運転における吸入空気量を検出するという第1の学習用機関運転を実行し、各気筒ごとに、新気吹き抜け時における2つの異なる機械圧縮のうちの一方の機械圧縮比による機関運転の際の吸入空気量と他方の機械圧縮比による機関運転の際の吸入空気量との差分を算出し、各気筒ごとに算出された吸入空気量の差分のバラツキを各気筒間における機械圧縮比のバラツキとして学習する。
(もっと読む)
内燃機関のEGR制御装置
【課題】EGR装置を備えたエンジンにおいて、EGR弁の全閉位置(EGRガス流量が最小となる開度)を精度良く学習できるようにする。
【解決手段】アイドル運転中にEGR弁26の開度を所定開度(例えば設計上の全閉位置)から所定ステップ量ずつ増加させてエンジン回転変動(例えばエンジン回転速度の標準偏差)を算出する処理をEGR弁26の開度が所定値以上になるまで繰り返した後、EGR弁26の開度を所定開度から所定ステップ量ずつ減少させてエンジン回転変動を算出する処理をEGR弁26の開度が所定値以下になるまで繰り返す。このようにしてEGR弁26の開度を増加及び減少させたときにエンジン回転変動が最小となるEGR弁26の開度のうちの最大値を全閉位置として学習する。或は、エンジン回転変動が最小となるEGR弁26の開度のうちの最大値と最小値の平均値を全閉位置として学習しても良い。
(もっと読む)
内燃機関
【課題】精度良く新気の吹き抜け量を推定できる内燃機関を提供する。
【解決手段】シリンダ容積にシリンダ内吸気密度を乗じてシリンダ内空気質量を算出する(S11)。S11で算出されたシリンダ内空気質量と、機関回転速度と、回転当たりの吸気シリンダ数を用いてシリンダトラップ吸入空気量を算出する(S12)。
エアフローメータ9で検出された吸入空気量から、S12で算出されたシリンダトラップ吸入空気量を差し引いた値を推定掃気量として算出する(S13)。
(もっと読む)
内燃機関の制御装置
【課題】別部材を設けることなく、コンプレッサの内部に付着しているデポジットを除去することのできる内燃機関の制御装置を提供する。
【解決手段】排気ガスの一部をEGR通路79を介して第1吸気通路60に還流させる低圧EGR装置78と、ブローバイガスをEGR通路34を介して第1吸気通路60に還流させるブローバイガス還流経路74と、低圧EGR装置78から還流した排気ガスおよびブローバイガス還流経路74から還流したブローバイガスを含む混合気を圧縮して燃焼室7に供給するコンプレッサ65と、を備えたエンジン1の制御装置であって、コンプレッサ65に吸入される混合気の温度を制御する温度制御部と、コンプレッサ65による圧縮効率を判断する圧縮効率判断部と、コンプレッサ65の圧縮効率が予め定められた所定値以下であることを条件として、コンプレッサ65に吸入される混合気の温度を低下させる制御部と、を備える。
(もっと読む)
内燃機関の制御装置
【課題】EGR装置の異常や経年変化に伴う排気ガスの還流量の変化に応じて目標点火時期を適切な値に補正することにより、内燃機関のノッキングを未然に回避する。
【解決手段】EGR装置による還流が実施されているときのノック学習値と、還流弁を強制的に閉弁状態に制御しているときのノック学習値との差に基づいて、EGR装置による還流が実施されているときの目標点火時期を補正する内燃機関の制御装置において、EGR装置による還流が実施されているときの吸入空気量充填効率に対して還流弁を強制的に閉弁状態に制御しているときの吸入空気量充填効率の変動量が所定値以内に収まるようにスロットル開度を閉じ側に制御する。
(もっと読む)
内燃機関の可変バルブタイミング制御装置
【課題】中間ロック機構付き可変バルブタイミング制御システムのロック要求時に保持デューティ学習値がずれていた場合にロック完了までの時間が長くなることを抑制する。
【解決手段】ロック要求が発生したときにVCT位相を一旦中間ロック位相を所定量だけ通り越したロック前位相まで移動させるロック前位相制御を行ってから、VCT位相を中間ロック位相へ向けて戻しながらロックピン58を突出させるロックピン突出制御を行ってロックピン58によりVCT位相を中間ロック位相でロックする。その際、ロック前位相制御中に、保持デューティ学習実行条件を緩和して、通常の保持デューティ学習よりも早く保持デューティを学習できる条件に変更して保持デューティを学習することで、保持デューティ学習値を補正する保持デューティ学習値補正を行い、この保持デューティ学習値補正により補正された保持デューティ学習値に基づいて油圧制御弁25を制御する。
(もっと読む)
リフト量可変機構の制御装置
【課題】吸気バルブの最大リフト量を機関運転状態に応じた適切な量に変更することのできるリフト量可変機構の制御装置を提供する。
【解決手段】リフト量可変機構12の電子制御装置50は、制御軸14に設けられたターゲット30を検出することにより制御軸14の位置を検出するシャフトセンサ28と、吸気通路内の吸気圧を検出する吸気圧センサ130とを備えている。電子制御装置50は、制御軸14の移動に伴ってターゲット30が予め定められた特定位置に来たときの回転量センサ26の出力値に基づいて算出される制御軸14の位置を特定位置センサ値として読み込み、これら特定位置と特定位置センサ値とのずれに基づいて制御軸14の実位置を補正する補正量を算出する。さらに、所定の機関運転状態では、同一の機関運転状態における吸気圧及び推定吸気圧の乖離度合に応じて、制御軸14の実位置を補正する補正量をさらに修正する修正処理を実行する。
(もっと読む)
推進機の制御装置
【課題】船舶に複数並置された推進機において、制御基準となる推進機を切り替える。
【解決手段】船舶に複数並置された各推進機2L、2M、2Rの運転状態を制御する制御装置であって、各制御装置同士を、各推進機の運転情報を相互に送受信する通信回線3により接続した制御装置であり、自推進機の設置位置を判定する手段32と、通信回線3に接続されている他推進機の接続状態を判定する33手段と、複数の制御装置の中から制御基準となる推進機を判定する手段34とを備え、操船者が指定した任意の推進機、または、制御基準となる優先順位が一番高い推進機に制御基準となる推進機を切り替える。
(もっと読む)
可変動弁システムの制御装置
【課題】アクチュエーターの動作位置が不明な状況での固着の判定を速やかに行うことのできる可変動弁システムの制御装置を提供する。
【解決手段】動作が機械的に係止されるハイ端及びロー端の間を動作範囲とするアクチュエーターによって吸気バルブの作用角を可変とする可変動弁システムにあって、アクチュエーターの現在の動作位置が不明なときになされる、ロー端に向けての動作指令Aに対してのアクチュエーターの実動作量が規定の動作判定値a以下であり(S102:NO)、かつその後に指令されるハイ端への動作指令Bに対してのアクチュエーターの実動作量が規定の動作判定値b以下である(S108:NO)こともって固着有りとの判定を行うようにした。
(もっと読む)
1 - 20 / 431
[ Back to top ]