
Fターム[3G093CB02]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 車速・速度状態 (484) | 低車速・低速時 (174)
Fターム[3G093CB02]に分類される特許
101 - 120 / 174
車両の制駆動力制御装置

【課題】 制駆動力の統合型制御に於いて、種々の要因により目標加減速度と実加減速度との偏差が通常のフィードバック制御では抑制しきれない状況に於いて、そのことによる不具合の発生を抑制するよう目標制駆動力を適切に設定する制駆動力制御装置を提供すること。
【解決手段】 本発明の制駆動力制御装置では、目標加減速度が制駆動力実現系では達成できないとき(S60)、目標加減速度に基づいて目標制駆動力が制駆動力実現系がその発生可能な制駆動力の限界で作動するよう設定し直され(S70)、フィードバック制御量が目標制駆動力とフィードフォワード制御量との差分に設定し直されて(S80)、次のフィードバック制御量の算出に利用される。
(もっと読む)
内燃機関の失火判定装置および失火判定方法並びに車両

【課題】複数気筒の内燃機関、特にねじれ要素を介して後段に接続された複数気筒の内燃機関の失火を精度良く判定する。
【解決手段】クランクシャフトが10度回転する毎の10度回転角速度ω10に対してエンジンの各気筒の爆発燃焼の周波数成分の減衰は小さいがねじれ要素としてのダンパのねじれに基づく共振の周波数成分の減衰は大きいハイパスフィルタを施して得られるフィルタ後角速度ω10fの上死点のフィルタ後角速度ω10f(TDC)と上死点から60度のフィルタ後角速度ω10f(ATDC60)との差分として判定用値Jωfを計算し(S110)、判定用値Jωfが閾値Jref以上となったときに対象気筒の直前の気筒を失火と判定する(S120,S130)。これは、失火が生じた気筒で爆発燃焼がないために次の気筒の爆発燃焼による回転角速度の変化量が大きくなることに基づく。
(もっと読む)
車速制御装置
【課題】簡易な構成でロックアップハンチングを抑制すること。
【解決手段】車速制御装置10は、定速走行時の目標車速を設定する目標車速設定手段1dと、走行車速を検出する車速検出手段4と、目標車速に対する走行車速の偏差と、フィードバック制御用の制御ゲイン値と、に基づいて、スロットル要求開度を算出する要求開度算出手段1aと、スロットル要求開度に基づいて、エンジン11のスロットル弁2の開度を制御するスロットル制御手段1bと、トルクコンバータ3のロックアップクラッチ3aをオン状態又はオフ状態に制御するロックアップ制御手段1cと、を備えている。要求開度算出手段1aは、ロックアップ制御手段1cによりロックアップクラッチ3aがオン状態に制御されたときと、オフ状態に制御されたときとで、制御ゲイン値を変更する。
(もっと読む)
ハイブリッド車両のエンジン始動時クラッチ締結制御装置
【課題】エンジン始動を駆動力の途切れなしに行い得るようにすると共に、そのためのクラッチスリップを外乱発生時も狙い通りに維持し得るようにする。
【解決手段】第2クラッチ伝達トルク容量目標値演算手段は、第2クラッチ出力側回転数目標値演算手段からの目標値tNc2oと、第2クラッチ出力側回転数検出手段からの検出値Nc2oとの間における偏差Nc2oerrを低下させるクラッチ容量目標値tTc2fbonを演算し、第2クラッチ伝達トルク容量制御手段は第2クラッチをtTc2fbonとなるよう制御する。モータ/ジェネレータ出力トルク目標値演算手段は、第2クラッチ入力側回転数目標値演算手段からの目標値tNc2iと、第2クラッチ入力側回転数検出手段からの検出値Nc2iとの間における偏差Nc2ierrを低下させるモータトルク目標値tTmを演算し、モータ/ジェネレータ出力トルク制御手段はモータ/ジェネレータ1をtTmとなるよう駆動制御する。
(もっと読む)
電気駆動ダンプトラックの駆動システム
【課題】電気駆動ダンプトラックの駆動システムにおいて、通常走行時にアクセルペダルの操作量と電動モータの出力馬力との関係が一致した良好な操作感覚が得られるとともに、微速走行時の制御性を高め、微妙な位置決めを容易に行うことができるようにする。
【解決手段】ブロック213〜216でアクセルペダル1の操作量に応じたモータ目標出力馬力Pm0を計算し、ブロック221,222でモータ目標出力馬力Pm0と電動モータ12R,12Lの回転数ωR,ωLとに基づいてモータ目標トルクTr1R,Tr1Lを計算し、ブロック225でアクセルペダル1の操作量に応じた電動モータ12R,12Lの加速トルク制限値(モータ加速トルクTrmax2)を計算し、ブロック226,227で加速トルク制限値とモータ目標トルクTr1R,Tr1Lの小さい方の値をモータトルク指令値TrR,TrLとして選択し、インバータ73R,73Lを制御する。
(もっと読む)
ハイブリッド車両の制御装置及びハイブリッド車両の制御方法。
【課題】 第2締結要素の耐久性を向上することが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンと、モータと、前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える制御手段と、前記第2締結要素の温度を検知する温度検知手段と、を有し、車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることとした。
(もっと読む)
電気駆動ダンプトラックの駆動システム
【課題】電気駆動ダンプトラックの駆動システムにおいて、ストールを防止しかつ原動機出力限界まで走行電動モータで原動機出力馬力を利用できるようにする。
【解決手段】アクセルペダル1の操作量に応じたモータ目標馬力Mr1を計算し、原動機4の目標回転数Nrに応じて原動機4の最大出力馬力のうち電動モータ12R,12Lで使用可能な最大馬力を計算し、そのときの回転数偏差に応じた馬力係数Kpを演算し、電動モータ12R,12Lで使用可能な最大馬力をその馬力係数Kpにより補正して第2モータ目標馬力Mr3を求め、モータ目標馬力Mr1を第2モータ目標馬力Mr3以下に制限し、電動モータ12R,12Lのトルクを制御する。
(もっと読む)
ハイブリッド車両のDPF制御装置
【課題】モータアシストモードで走行中にDPF再生モードへ移行するときであってバッテリの充電量が低いとき、エンジントルクの急激な増大によるトルクショック及びDPFの溶損を防止しながら効率的なDPFの再生を行う。
【解決手段】本発明は、モータアシストモード走行中に、PMの堆積量が所定の堆積量より多く(S2)、かつバッテリの充電量が所定の充電量より低いとき(S3)、バッテリの充電量に基づいてエンジンの第1の目標トルクを演算し(S4)、第1の目標トルクと現在トルクとのトルク差が所定値より大きいとき(S5)、排気温度が所定温度以上となるトルクであって、第1の目標トルクより小さい第2の目標トルクを演算し(S6)、トルクが第2の目標トルクとなるように燃料噴射量及び燃料噴射時期の少なくとも一方を制御した後に、第1の目標トルクとなるように燃料噴射量及び燃料噴射時期の少なくとも一方を制御する(S11)。
(もっと読む)
ハイブリッド車両
【課題】この発明は、ハイブリッド車両に関し、排気浄化触媒の暖機中においても低エミッションを実現することを目的とする。
【解決手段】ハイブリッド車両1は、ガソリンと水素との双方を燃料として運転可能な内燃機関2と、モータ4とを備える。排気浄化触媒15の温度を上昇させる必要のある場合には、内燃機関2を、水素のみを燃料とし、空気過剰率λ>1で運転する触媒暖機水素リーン運転を行うとともに、点火時期を遅角して排気温度を高めて、排気浄化触媒15の暖機を促進する。この触媒暖機水素リーン運転時には、要求走行出力に対する内燃機関2の出力の不足を補うように、バッテリ20に蓄えられた電力をモータ4に供給してモータ4を作動させ、車両1の走行をアシストする。
(もっと読む)
エンジンの始動装置
【課題】比較的短いエンジン停止動作期間であっても、再始動時に有利な掃気形態をとることができるエンジンの始動装置を提供する。
【解決手段】所定の自動停止条件が成立したときに、全気筒燃料カットA4を行ってエンジンを自動的に停止させるエンジン自動停止制御を行うとともに、その後の再始動条件成立時に、停止時圧縮行程気筒12Aで燃焼を行わせてエンジンを逆回転させ、その後、停止時膨張行程気筒12Bで燃焼を行わせてエンジンを自動的に再始動させる停止再始動制御手段を備えたエンジンの始動装置であって、自動停止条件が成立(t1)した後、着火順序が連続する2気筒12A,12Bへの燃料供給を先行して停止する第1特定モード運転A1を実行した後に全気筒燃料カットA4を行い、第1特定モード運転A1で燃料供給が停止された気筒12A,12Bが、停止時圧縮行程気筒と停止時膨張行程気筒とになるようにする。
(もっと読む)
車両用制御装置
【課題】 機械式自動変速機を備えた車両の制御装置に関し、簡素な構成で微動時におけるドライバビリティの向上を図る。
【解決手段】 駆動源と機械式自動変速機とクラッチとを備えるとともに、要求駆動トルクを設定する要求駆動トルク設定手段とをそなえ、要求駆動トルク設定手段を、アクセル開度の低い領域ではアクセル開度の増加に対する要求駆動トルクの増加割合がアクセル開度の高い領域と比較して少なくなるように設定し、且つ、クラッチ回転数が中高回転域の領域ではクラッチ回転数が高くなるにしたがって同一アクセル開度における要求駆動トルクが増大するように設定する。
(もっと読む)
車両用制御装置
【課題】車両状態を考慮してエンジン及び発電機への最適なトルク分配を行うことにより、バッテリ劣化及び燃費悪化を共に抑制することができる車両用制御装置を提供する。
【解決手段】車両必要トルク調停部29は、バッテリ状態決定部24からのバッテリ状態と燃費決定部25からの燃費情報に基づいてトルク分配方法を決定し、オルタトルクデマンド部22からの発電必要量とエンジントルク算出部23からのエンジン必要トルク及び最適エンジントルク算出部28からの最適エンジントルクを用いて発電機とエンジンのトルク分配を行うことにより、車両必要トルクを決定する。そして、目標エンジン回転数決定部30は、車両必要トルク調停部29からの車両必要トルクに基づいて目標エンジン回転数を決定し、エンジンECUに送信する。
(もっと読む)
内燃機関の制御装置
【課題】車両に搭載される内燃機関を好適に始動させることが可能な内燃機関の制御装置を提供する。
【解決手段】エンジンECU280およびHV_ECU320はエンジン120の始動開始時点からの所定期間において、スロットル開度が制限値を超えず、かつ、単位時間あたりのスロットル開度の上昇率が所定の開度上昇率以下となるように、スロットルモータ296を制御する。これにより上記の所定期間内にはエンジンの出力パワーが大きく上昇しないよう制限される。よってエンジン始動時において、たとえば運転者に体感されるようなショックを抑制することができる。またエンジンの始動時に吸入される空気量のばらつきを防ぐことができるので排気エミッションのばらつきを防ぐことができる。
(もっと読む)
電気牽引
駆動系は、動力取出ポートを有する変速機に結合された内燃機関(「ICE」)を含む。伝達装置は、モータを変速機にポートを介して結合させる。モータは、特定の設定において、ICEの電源が遮断されている少なくとも特定の期間中、駆動系に選択的に動力供給することができる。 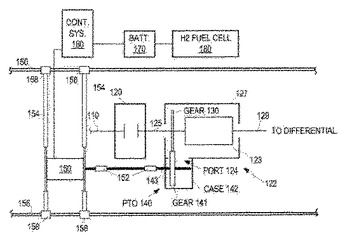 (もっと読む)
(もっと読む)
車両制御システム
【課題】駆動用動力源の自動停止時に、アクチュエータに駆動される機械式ブレーキによって制動を行う車両の信頼性を向上した車両制御システムを提供する。
【解決手段】車両の車輪を制動する機械式ブレーキ10の制動状態と解除状態とを移行させるアクチュエータ20を制御するブレーキ制御部40と、ブレーキ制御部40の機能を診断し、異常が検出された場合にフェール信号を出力する診断部41と、車両の運転状態が所定の停車判定条件を充足した場合に車両の駆動用動力源を自動停止させる動力制御部70とを備える車両制御システムを、動力制御部70は、診断部41がフェール信号を出力した場合に駆動用動力源の自動停止を禁止する構成とする。
(もっと読む)
車両の発電制御装置
【課題】エンスト防止やアドリングの安定化を図りつつも、アイドリング中の発電抑制制御の実行割合を少なくしてバッテリ電圧低下による不具合を解消する車両の発電制御装置を提供する。
【解決手段】本発明にかかる発電制御装置10は、エンジンEの運転状態がアイドル運転時にオルタネータ11による発電を抑制するものであって、その特徴は車速を検出する車速検出手段29で検出された車速Vsが判定速度Vs1以上の場合にオルタネータ11に対する発電抑制制御を禁止する点にある。
(もっと読む)
コンバイン
【課題】走行モードで刈取作業を行ってしまう不具合を改善しつつ、コンバイン各部の作動状況を確実にオペレータに認識させる技術を提案する。
【解決手段】エンジン80からの動力を高速(走行)モードまたは低速(作業)モードに切り換える副変速装置180と、該副変速装置180の変速位置を検知する位置センサ64と、警報ブザー58と、これらの入出力系機器を制御するためのコントローラ70と、を具備するコンバイン200において、前記コントローラ70が、前記位置センサ64が前記高速(走行)モードの変速位置を検知したときには、刈取部3を作動させないように制御する。
(もっと読む)
エンジン制御装置及びエンジン制御方法
【課題】エンジン制御においてアイドル条件が成立しても車速の調整を容易にし、かつ無駄なエネルギーの消費を減少させる。
【解決手段】本発明のエンジン制御装置においては、渋滞などの影響で車両がアイドリング状態でクリープ走行しているような場合でも、基本的にエンジン回転数に基づく回転数制御ではなくオートクルーズ制御が行われる。このため、車両が低速域で走行している場合にも車速の微調整が容易になる。その結果、基本的にブレーキ制御を伴わないか或いはブレーキ制御が抑制され、車両の低速走行時における無駄なエネルギーの消費を減少させることができる。
(もっと読む)
車両およびその制御方法
【課題】上り坂での発進時や低速走行時に、バッテリなどの蓄電装置を過大な電力によって充電することなく、より適正なトルクを出力して走行する。
【解決手段】登り勾配の坂道の発進時か低速走行時に運転者が大きなトルクを要求しているときには(S120)、バッテリの入力制限Winの範囲内となる要求パワーPe*や車両の状態からエンジンの下限回転数Nminと上限回転数Nmaxとを求め(S150〜S170)、勾配θが大きくなるほど小さくなる傾向の勾配係数kで下限回転数Nminと上限回転数Nmaxとを按分する回転数としてエンジンの目標回転数Ne*を設定し(S190)、この目標回転数Ne*を用いてエンジンの目標トルクTe*やモータMG1,MG2のトルク指令Tm1*,Tm2*を設定して制御する(S200〜S250)。これにより、より適正なトルクを出力して走行することことができる。
(もっと読む)
車両の制御装置
【課題】内燃機関の始動時に発生するショックを低減する。
【解決手段】HV_ECUは、エンジンが負荷運転中であるか(S100にてYES)、あるいは、エンジンが始動処理中であると(S102にてYES)、アクセル開度がマップ値よりも大きいか否かを判断するステップ(S104)と、アクセル開度がマップ値よりも大きいか(S104にてYES)、あるいは、要求パワー(1)が要求パワー(2)よりも大きいと(S106にてYES)、VVT進角要求フラグをオンするステップ(S108)と、アクセル開度がマップ値以下であって(S104にてNO)、要求パワー(1)が要求パワー(2)以下であると(S106にてNO)、VVT進角要求フラグをオフするステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
101 - 120 / 174
[ Back to top ]