
Fターム[3G093CB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646)
Fターム[3G093CB04]の下位に属するFターム
Fターム[3G093CB04]に分類される特許
161 - 180 / 201
ハイブリッド車のモード遷移制御装置およびモード遷移制御方法

【課題】 エンジン始動ショックを抑制できるハイブリッド車のモード遷移制御装置およびモード遷移制御方法を提供する。
【解決手段】 モード遷移制御手段は、EV-LBで走行中にエンジン始動条件が成立したとき、要求駆動力Fdrvの増加率dFdrv/dtがあらかじめ設定された要求駆動力増加率しきい値dFdrv_t/dt以下、かつ、バッテリ残量がバッテリ残量下限値以上である場合には、EVモードへ移行し、EVモードまたはE-iVTモードを維持する。
(もっと読む)
車両の発進クラッチ制御装置

【課題】 発進クラッチの摩擦係数低下やプレート間クリアランスの増大にかかわらず、狙ったトルクに対し適正な締結力コントロールを行うことができる車両の発進クラッチ制御装置を提供すること。
【解決手段】 車両状態に基づきトルク指令値を算出し、算出したトルク指令値を締結力指令値変換マップを用いて締結力指令値に変換し、発進時、前記締結力指令値を出力して駆動系に設けられた発進クラッチの摩擦締結制御を行う車両の発進クラッチ制御装置において、前記発進クラッチの完全締結指令時で、且つ、スリップせずに路面へタイヤが力を伝える状況の時、駆動源回転数の上昇勾配が、クラッチ滑りがない状況を想定して設定した駆動源回転数の上昇勾配より大きい場合、同じ時間での駆動源トルク差に基づき、前記締結力指令値変換マップの特性を補正するクラッチ締結力補正手段を設けた。
(もっと読む)
ハイブリッド駆動装置の制御装置
【課題】エンジンの始動や出力状態の変更を安定的に実行できるハイブリッド駆動装置の制御装置を提供する。
【解決手段】第1の動力源からトルクの伝達される出力部材に、変速機を介して第2の動力源が連結されたハイブリッド駆動装置の制御装置において、前記変速機での変速を判定する変速判定手段(ステップS28)と、前記変速機による変速中であることが前記変速判定手段(ステップS28)で判定された場合に前記第1の動力源の停止を制限する停止制御制限手段(ステップS29)とを備えている。
(もっと読む)
停止の緩やかさ評価装置および評価方法
【課題】走行状態から車両を停車させる場合に、緩やかな停止操作を行われているかを評価するために利用する。ディジタル走行記録から、各運転者に安全かつ経済的な運転を実行してもらうために、個々の運転者に停止操作の評価値をわかりやすい形態で提示する。
【解決手段】ディジタル・タコメータに記録される走行車速の記録から、停車にいたる前の数十秒間の車速変化を分析し、所定車速(例、25km/h)以上である区間で急に車速が低下した時点を停止決心点として同定する。そして停止決心点から車速零にいたる区間は直線的に車速が低下したものとして、その車速勾配を評価値とする。走行記録から多数の停車にいたる車速勾配を演算し運転者の技量を統計的に評価することができる。
(もっと読む)
無段変速機の制御装置
【課題】アクセル踏み増し時において、制御された変速比において駆動力を十分に得ることができ、エンジンの負荷が増加してしまうことが防止でき、加えて、高負荷時において排気ガスの質が悪化することを防止することができる無段変速機の制御装置を提供する。
【解決手段】本発明に係る無段変速機の制御装置は、加速のためのアクセル踏み増し時において、アクセル開度により決定される通常のシフトスケジュールの特性曲線βよりも高い側に、目標入力回転数を増大補正することを特徴とする。
(もっと読む)
車両制御装置
【課題】 車両ばね上振動特性の設定状態が検出不能になった場合でも、ドライバビリティの悪化を最小限に抑えながら、ある程度の制振効果を得ることができるようにする。 【解決手段】 振動特性可変手段15(電子制御サスペンション)は、車両ばね上振動特性を3段階に切り替える。これに対応して、要求制駆動力をフィルタリングする制振フィルタ13は、周波数特性の異なる3種類の制振フィルタF1〜F3から成る。フェールセーフ手段18は、車両ばね上振動特性の設定状態が何等かの異常で検出不能になった場合には、3種類の制振フィルタF1〜F3の中から車両ばね上振動特性の最大可変幅の中央付近の振動特性に合った第2制振フィルタF2を選択して、この第2制振フィルタF2によって要求制駆動力をフィルタリング処理して制御手段14に入力する。
(もっと読む)
車両およびその制御方法
【課題】 定速走行をより容易に迅速に行なうと共に運転状態に応じて定速走行を行なう。
【解決手段】 アクセルオンの状態からアクセルオフとしたときにそのときの車速Vを目標車速V*として設定し(S440)、車速Vが目標車速V*となるよう走行用の動力を出力するエンジンやモータを制御する。目標車速V*が設定されているときに運転者がブレーキペダルを踏み込み、その後にブレーキペダルを離したときには、そのときの車速Vを目標車速V*に設定し(S510)、定速走行を再開する。このとき、ハンドル操作が行なわれると、ブレーキペダルを踏み込む直前に設定されていた目標車速V*を再び目標車速V*として設定して(S520)、定速走行を再開する。これらの結果、定速走行をより容易により迅速に行なうことができると共に運転状態に応じて定速走行を行なうことができる。
(もっと読む)
内燃機関の過給装置
【課題】電動過給機4による過給量を運転者の意思により調整できる内燃機関1の過給装置を提供する。
【解決手段】電動過給機4の作動を制御する制御装置5は、電動機2を駆動するための駆動装置8と、運転者が過給量調整手段6によって設定する過給量に応じて駆動装置8の作動を制御する制御指令部9とを備える。
過給量調整手段6は、運転者が手動操作できる操作レバーを有し、この操作レバーの位置に応じて、電動過給機4の過給量を設定できる。操作レバーは、レバー位置に応じて可変抵抗の抵抗値を変更でき、その抵抗値に応じた電気信号が制御指令部9に出力される。 これにより、運転者が操作レバーを操作して電動過給機4の過給量を調整できるので、運転者がエンジン出力を上げて運転を楽しみたい場合や、エンジン出力を下げて走行したい場合等に応じて、運転者の使用したいエンジン出力に調整することが可能となる。
(もっと読む)
自走車両用ドライブトレイン
作業機械、とりわけホイールローダのためのドライブトレインは、一次クラッチ(2)を介して流体トルクコンバータ(3)を駆動する内燃機関(1)を有する。流体トルクコンバータ(3)の出力側は減速装置(4)を駆動する。駆動機関(1)はパワーテークオフ(6)と連結され、負荷機器(7)を駆動する。駆動機関(1)と流体トルクコンバータは、停止点で負荷機器(7)が不作動の場合に駆動機関(1)がほぼ最大トルクで運転されるように設計されている。さらに負荷機器(7)が作動されると、駆動機関の所定の回転数が維持されるように、一次クラッチ(2)が切断方向に操作される。 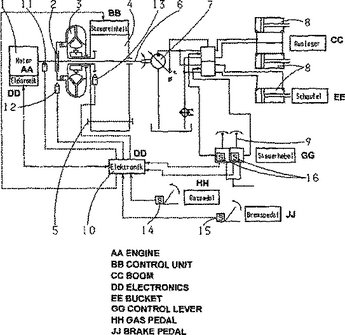 (もっと読む)
(もっと読む)
作業車両の制御装置
【課題】作業車両の発進及び停止操作などを容易にでき、オペレータは環境や動作結果などに対して俊敏に対処できる作業車両の制御装置を提供しょうとするものである。
【解決手段】走行機体に搭載されたエンジンからの動力を変速する油圧式無段変速機と、前記油圧式無段変速機からの駆動出力を走行車輪に伝達するクラッチ機構と、前記油圧式無段変速機の変速比を変更する変速ペダルと、前記変速ペダルの踏込み量を検出する変速センサと、前記油圧式無段変速機の変速駆動出力回転数を検出する変速出力部回転センサとを備えてなる作業車両において、前記エンジンの回転数をスロットルレバーにて設定した回転数に維持するエンジン制御手段と、前記変速ペダルの踏込み量に基づき前記エンジンの回転数と前記油圧式無段変速機の変速比とを制御する走行制御手段と、前記クラッチ機構を前記走行制御手段の自動制御に優先してオフにするクラッチ切り手段とを備えたものである。
(もっと読む)
加減速度制御装置
【課題】 加減速操作が繰り返し必要となる走行環境において発生しやすい無段階変速機の変速のビジー感を効果的に抑制することができる1ペダル方式の加減速度制御装置の提供。
【解決手段】 単一のペダルの操作ストローク内に減速領域と加速領域とを形成し、該ペダルの操作量に応じて制動力発生装置、駆動力発生装置及び無段階変速機を制御して車両の加減速度を制御する加減速度制御装置において、車両の運転状態及び/又は走行環境に関する情報に基づいて、現在の車両位置よりも前方で必要となる所定値以上の駆動力を必要推定駆動力として推定し、該必要推定駆動力を発生すべき地点よりも手前から、該必要推定駆動力の発生に伴う変速比の変動が抑制されるように無段階変速機の変速制御を行うことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 モータ能力の変動の影響を大きく受けることなく、常時安定して変速ショックを吸収できるようにして、快適な乗り心地と運転フィーリングの向上を図る。
【解決手段】 自動変速機内のクラッチ油圧を制御し、運転状況に応じて変速時における駆動源側へのトルクダウン要求量を演算する変速機ECU40を設けると共に、運転状況に応じてエンジン1とモータ2のトルク配分量を演算して、その演算結果をエンジン制御部45とモータECU43に出力するトルク管理ECU41を設ける。トルク管理ECU41は、変速時に、変速機ECU40からトルクダウン要求量の情報を通信によって受け取り、このとき、エンジン1のトルクダウン分を優先して割り当て、残余のトルクダウン分をモータ2に割り当てる。変速時には、エンジン1を優先したトルクダウンが行われ、モータ2の能力の変動の影響を受け難くなる。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御装置,動力出力装置の制御方法
【課題】 駆動軸に出力すべき駆動力をより迅速に出力する。
【解決手段】 遊星歯車機構にエンジンと第1モータと駆動軸とを接続し、駆動軸に変速機を介して第2モータを取り付けた自動車において、変速機がLoギヤの状態のときには要求パワーPe*に基づいてエンジンを間欠運転し(S170,S230)、変速機がHiギヤの状態のときにはエンジンを継続して運転する(S330)。これにより、変速機がHiギヤの状態のときに駆動軸に比較的大きな駆動力が要求されたときには、エンジンを運転停止しているものに比して要求された駆動力をより迅速に出力することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 減速走行時におけるモータジェネレータの協調駆動制御を伴うダウンシフトでの違和感の発生を防止する。
【解決手段】 エンジン2、モータジェネレータ4および自動変速機7を備えてハイブリッド車両1が構成され、自動変速機7の自動変速制御を行う油圧制御バルブ12およびコントロールユニット15と、モータジェネレータ4の駆動制御を行うパワードライブユニット11およびコントロールユニット12とを備える。アクセルを解放した状態で走行している間に自動変速制御が行われる場合に、実入力側回転数が変速後のギヤレシオに対応する入力側回転数に近づくようにモータジェネレータの協調駆動制御を行うが、車輪側に対するトータル制動トルクがエンジンフリクショントルクより大きくなるように協調駆動制御が行われる。
(もっと読む)
車両の駆動力制御装置
【課題】 凍結等により滑りやすくなっているコーナーでの走行時に、過誤のアクセル操作等により車両がスリップを起こす不具合を回避する。
【解決手段】 車両走行中に前方にコーナーが現れた場合にこれをカーナビゲーションシステム等の道路情報検出手段により検出し、アクセル開度に対する不感帯設定または遅れフィルタ処理を施し、急激なアクセル操作が直接的に車両の駆動力に反映しないようにする。これにより、コーナー走行中に誤って過大なアクセル操作をした場合のスリップ発生の可能性を低減する。
(もっと読む)
車両用走行制御装置
【課題】 クルーズ走行時の運転者の運転(操作)負荷を軽減する車両用走行制御装置を提供すること。
【解決手段】 定速走行制御機能を備えた車両においてアクセルペダル反力の大きさを制御する車両用走行制御装置が、運転者によるアクセルペダル操作の状態を検出するアクセルペダル操作検出手段と、アクセルペダル反力の大きさを制御するアクセルペダル反力制御手段と、定速走行制御中、自車両の車速が設定車速に維持されるようにスロットル開度を制御するスロットル開度制御手段とを備え、アクセルペダル反力制御手段が、定速走行制御中、アクセルペダル開度に対してアクセルペダル反力が急増する第一の領域を設け、スロットル開度制御手段が、アクセルペダル操作検出手段により検出された上記第一の領域における又は該第一の領域よりもアクセルペダル開度が小さい第二の領域におけるアクセルペダル操作の状態に応じて上記設定車速を変更する。
(もっと読む)
車両用駆動装置の制御装置
【課題】 エンジンの出力を第1電動機および出力軸へ分配する差動機構とその出力軸に設けられた電動機とを備える車両用駆動装置において、その駆動装置を小型化できたり、或いはまた燃費が向上させられると共に、エンジンの空燃比制御時にショックが抑制される制御装置を提供する。
【解決手段】 切換クラッチC0或いは切換ブレーキB0を備えることで、変速機構10が無段変速状態と有段変速状態とに切り換えられて、電気的に変速比が変更させられる変速機の燃費改善効果と機械的に動力を伝達する歯車式伝動装置の高い伝達効率との両長所を兼ね備えた駆動装置が得られる。また、切換制御手段50による変速状態切換制御と空燃比切換制御手段90による空燃比切換制御とが重なる場合には、実行制御手段82により前記変速状態切換制御が優先して実行させられ、その変速状態切換制御の完了後に前記空燃比切換制御が実行されるので、ショックが抑制される。
(もっと読む)
車両の制御装置
【課題】 操作性を悪化させることなく、乗員が望む停止位置で車両を停止させる。
【解決手段】 ECT_ECUは、アクセル開度Pを検出するステップ(S124)と、アクセル開度Pの変化量ΔPを検出するステップ(S126)と、アクセル開度Pの変化量ΔPに基づいて目標移動距離LIを算出するステップ(S128)と、算出された目標移動距離LIの総和である総移動距離LAを算出するステップ(S130)と、車両の実走距離が総移動距離LAとなるように車両を制御するステップ(S132)と、アクセル開度変化率DPが0であるという条件、アクセル開度変化率DPがDP(0)(DP(0)≒0)より小さいという条件およびブレーキペダルが踏まれたという条件の少なくともいずれかが満たされた場合(S136にてYES)、車両の移動を停止するステップ(S138)とを含む、プログラムを実行する。
(もっと読む)
車両用制御対象判定装置
【課題】 自車の将来の走行軌跡の信頼性が低下したときでも制御対象の誤判定の発生を防止する。
【解決手段】 レーダー装置14が自車の進行方向に存在する物体を検知した結果と、走行軌跡推定手段M1が車速およびヨーレートから推定した自車の将来の走行軌跡と、予め定められた制御対象判定条件とに基づいて制御対象判定手段M4が制御対象を判定する際に、横相対速度検出手段M3で自車に対する物体の横相対速度を検出し、推定した走行軌跡が直線状態でなく、かつ物体の横相対速度が閾値未満の場合、あるいは推定した走行軌跡が直線状態であり、かつ物体の横相対速度が閾値以上の場合に、自車から所定距離以遠の物体を制御対象から除外することで、隣車線の先行車を制御対象と誤認するのを回避することができる。
(もっと読む)
遠心クラッチ用回転数保護回路
【課題】遠心クラッチの熱的負荷を制限する。
【解決手段】内燃エンジン(2)の回転数を制御するための装置、特にパワーチェーンソー、切断研削機、刈払い機等の手で操縦される作業機の2サイクルエンジンの回転数を制御するための装置であって、内燃エンジン(2)のクランク軸(10)のクランク軸角度に対する点火プラグ(6)の点火時点を内燃エンジン(2)の回転数に依存して制御する点火回路(7)と、第1の回転数(D1)を越えたときに連結し、第2の回転数(D2)に達した後連結状態になっている、クランク軸(10)により駆動される遠心クラッチ(3)とを備えた内燃エンジン(2)の回転数を制御するための装置において、第1の回転数(D1)と第2の回転数(D2)との間の回転数帯域(D)で保護回路(17)は作動状態にある。保護回路(17)は回転数帯域(D)内での実際の回転数の滞留時間を監視する。所定の滞留時間を越えたときに回転数が回転数帯域(D)外になるように保護回路(17)は燃焼過程の制御に介入する。
(もっと読む)
161 - 180 / 201
[ Back to top ]